TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024157355
公報種別
公開特許公報(A)
公開日
2024-11-07
出願番号
2023071675
出願日
2023-04-25
発明の名称
運転支援方法及び運転支援装置
出願人
日産自動車株式会社
代理人
弁理士法人とこしえ特許事務所
主分類
G08G
1/16 20060101AFI20241030BHJP(信号)
要約
【課題】通信に遅延が発生した場合でも車両の走行シーンに適さない遠隔支援を抑制できる運転支援方法及び運転支援装置を提供する。
【解決手段】車両10の外部の遠隔支援装置30から支援情報を受信した場合は、支援情報が送信された送信時刻と、支援情報を受信した受信時刻との差から遅延時間を算出し、遅延時間が所定時間より長いと判定した場合は、支援情報に基づく車両10の自律走行制御を実行しない。
【選択図】図1
特許請求の範囲
【請求項1】
車両の外部の遠隔支援装置から受信した支援情報に基づき前記車両を自律走行させる、前記車両の運転支援装置により実行される運転支援方法において、
前記運転支援装置は、
前記遠隔支援装置から前記支援情報を受信した場合は、前記遠隔支援装置が前記支援情報を送信した送信時刻と、前記運転支援装置が前記支援情報を受信した受信時刻との差から遅延時間を算出し、
前記遅延時間が、所定時間より長いか否かを判定し、
前記遅延時間が前記所定時間より長いと判定したときは、前記支援情報に基づく前記車両の自律走行制御を実行しない、運転支援方法。
続きを表示(約 1,900 文字)
【請求項2】
前記運転支援装置は、
前記遅延時間が前記所定時間より長いと判定した場合であっても前記支援情報に基づく前記自律走行制御を実行する例外指示を予め設定し、
前記遅延時間が前記所定時間より長いと判定した場合に、前記支援情報が前記例外指示を含むか否かを判定し、
前記支援情報が前記例外指示を含むと判定したときは、前記支援情報に基づく前記自律走行制御を実行し、
前記支援情報が前記例外指示を含まないと判定したときは、前記支援情報に基づく前記自律走行制御を実行しない、請求項1に記載の運転支援方法。
【請求項3】
前記運転支援装置は、
前記遠隔支援装置に遠隔支援の要請を送信し、
前記支援情報が、前記要請に対応する情報であるか否かを判定し、
前記支援情報が、前記要請に対応する前記情報でないと判定したときは、前記遅延時間が前記所定時間より長いと判定した場合であっても、前記支援情報に基づく前記自律走行制御を実行する、請求項1又は2に記載の運転支援方法。
【請求項4】
前記運転支援装置は、
前記遅延時間が前記所定時間より長いと判定した場合に、前記支援情報が、前記自律走行制御により走行動作を行う実行指示と、前記自律走行制御による前記走行動作を設定するための判断情報とのいずれであるかを判定し、
前記支援情報が前記実行指示であると判定したときは、前記支援情報に基づく前記自律走行制御を実行せず、
前記支援情報が前記判断情報であると判定したときは、前記支援情報を用いた前記自律走行制御を実行する、請求項1又は2に記載の運転支援方法。
【請求項5】
前記実行指示は、前記車両が停車状態から発進する指示を含む、請求項4に記載の運転支援方法。
【請求項6】
前記運転支援装置は、
前記判断情報として、前記遠隔支援装置から、目的地の情報と、走行経路の情報と、前記車両の周囲に存在する障害物の種別の情報とのうち少なくとも1つを取得する、請求項4に記載の運転支援方法。
【請求項7】
前記運転支援装置は、
前記支援情報を受信する前に、前記遠隔支援装置に遠隔支援の要請を送信した場合は、前記要請を送信した時の前記車両の走行状況を記憶し、
前記遅延時間が前記所定時間より長いと判定した場合に、前記支援情報を受信した時の前記車両の前記走行状況が、前記要請による前記遠隔支援を実行するのに適した前記走行状況であるか否かを判定し、
前記支援情報を受信した時の前記車両の前記走行状況が、前記要請による前記遠隔支援を実行するのに適した前記走行状況であると判定した場合は、前記支援情報に基づく前記自律走行制御を実行し、
前記支援情報を受信した時の前記車両の前記走行状況が、前記要請による前記遠隔支援を実行するのに適した前記走行状況でないと判定した場合は、前記支援情報に基づく前記自律走行制御を実行しない、請求項1又は2に記載の運転支援方法。
【請求項8】
前記運転支援装置は、
前記支援情報を受信した時の前記車両の前記走行状況が、前記要請による前記遠隔支援を実行するのに適した前記走行状況であると判定した場合は、前記支援情報が、前記自律走行制御により走行動作を行う実行指示と、前記自律走行制御による前記走行動作を設定するための判断情報とのいずれであるかを判定し、
前記支援情報が前記実行指示であると判定したときは、前記支援情報に基づく前記自律走行制御を実行せず、
前記支援情報が前記判断情報であると判定したときは、前記支援情報を用いた前記自律走行制御を実行する、請求項7に記載の運転支援方法。
【請求項9】
前記車両の前記走行状況は、前記車両の走行状態と、前記車両の走行計画と、前記車両の周辺の走行環境とを含む、請求項7に記載の運転支援方法。
【請求項10】
車両の外部の遠隔支援装置から受信した支援情報に基づき前記車両を自律走行させる運転支援装置において、
前記遠隔支援装置から前記支援情報を受信した場合は、前記遠隔支援装置が前記支援情報を送信した送信時刻と、前記運転支援装置が前記支援情報を受信した受信時刻との差から遅延時間を算出する算出部と、
前記算出部が算出した遅延時間が、所定時間より長いか否かを判定する判定部と、
前記判定部が、前記遅延時間が前記所定時間より長いと判定したときは、前記支援情報に基づく前記車両の自律走行制御を実行しないための指示を出力する制御部とを備える、運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援方法及び運転支援装置に関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
自動運転支援センタと自動運転車との間の通信状態、及び自動運転車の周囲の環境状態の少なくとも一方に基づき、自動運転車に対してオペレータが実施可能な遠隔支援を制限する遠隔支援システムが知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2021-68132号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、自動運転支援センタと自動運転車との間の通信状態に応じて、自動運転支援センタのオペレータが実施可能な遠隔支援を制限するが、自動運転車における自律走行制御は制限されない。そのため、上記従来技術では、自動運転支援センタから自動運転車への通信に遅延が発生している場合に、自動運転支援センタから指示を受信したときは、自動運転車の現在の走行シーンに適さない遠隔支援が実行されてしまうという問題がある。
【0005】
本発明が解決しようとする課題は、通信に遅延が発生している場合に、車両の現在の走行シーンに適さない遠隔支援が実行されることを抑制できる運転支援方法及び運転支援装置を提供することである。
【課題を解決するための手段】
【0006】
本発明では、車両の外部の遠隔支援装置から支援情報を受信した場合は、支援情報が送信された送信時刻と、支援情報を受信した受信時刻との差から遅延時間を算出し、遅延時間が所定時間より長いと判定した場合は、支援情報に基づく車両の自律走行制御を実行しないことによって上記課題を解決する。
【発明の効果】
【0007】
本発明によれば、通信に遅延が発生している場合に、車両の現在の走行シーンに適さない遠隔支援が実行されることを抑制できる。
【図面の簡単な説明】
【0008】
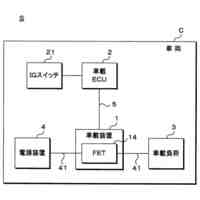
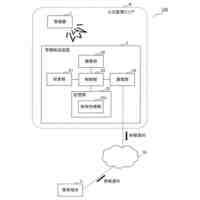
本発明に係る遠隔支援システムの実施形態の一例を示すブロック図である。
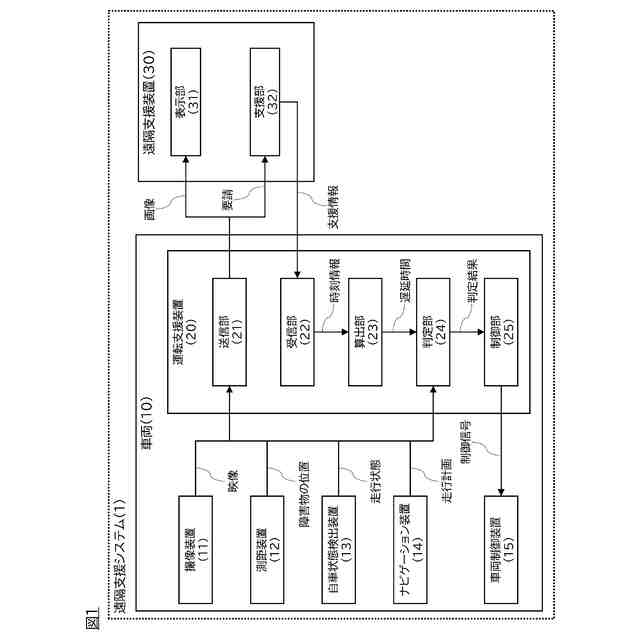
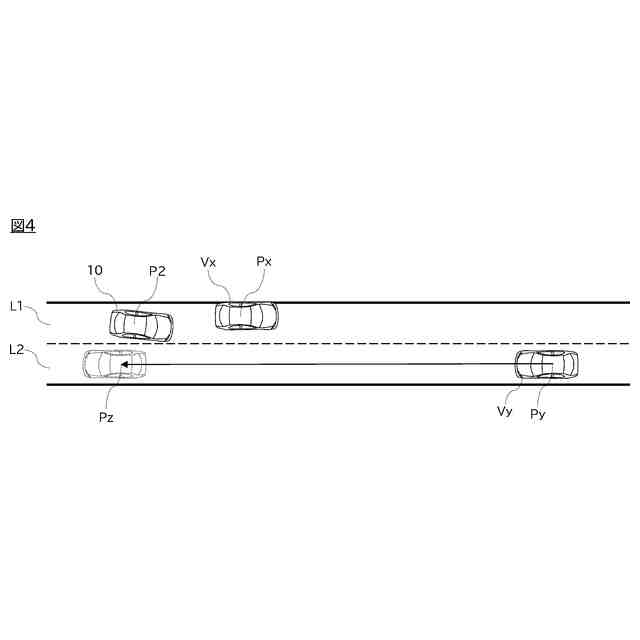
図1に示す遠隔支援システムにて運転支援を実行する走行シーンの一例を示す平面図である(その1)。
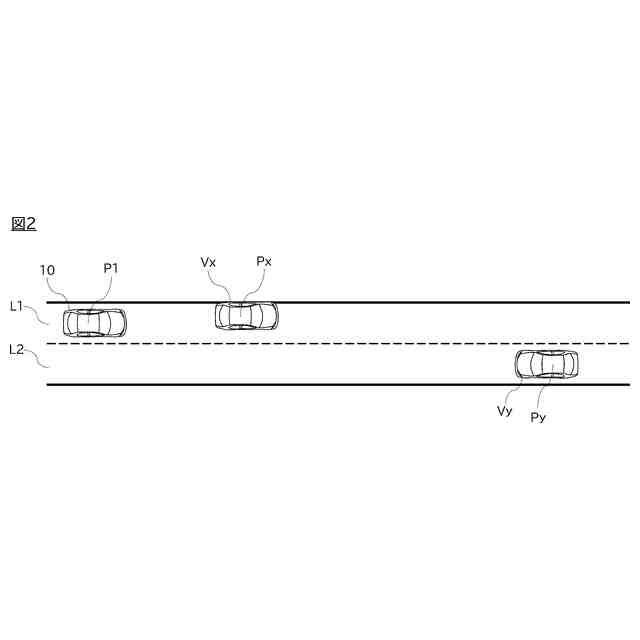
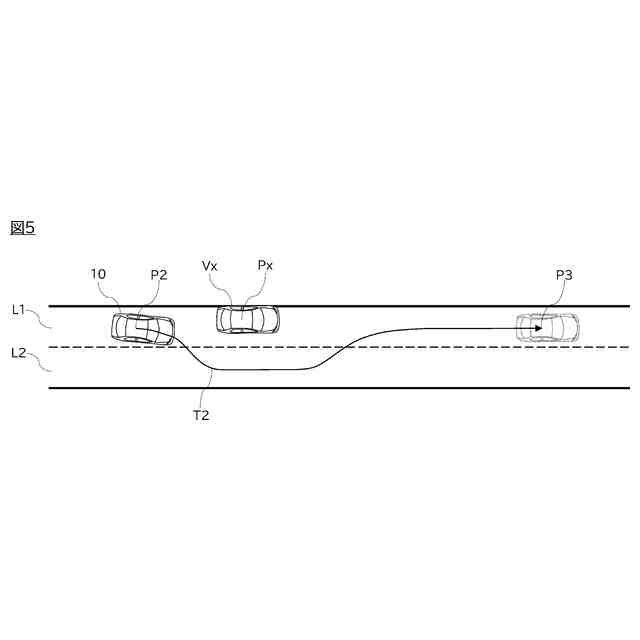
図1に示す遠隔支援システムにて運転支援を実行する走行シーンの一例を示す平面図である(その2)。
図1に示す遠隔支援システムにて運転支援を実行する走行シーンの一例を示す平面図である(その3)。
図1に示す遠隔支援システムにて運転支援を実行する走行シーンの一例を示す平面図である(その4)。
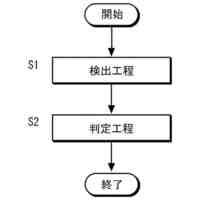
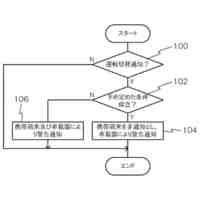
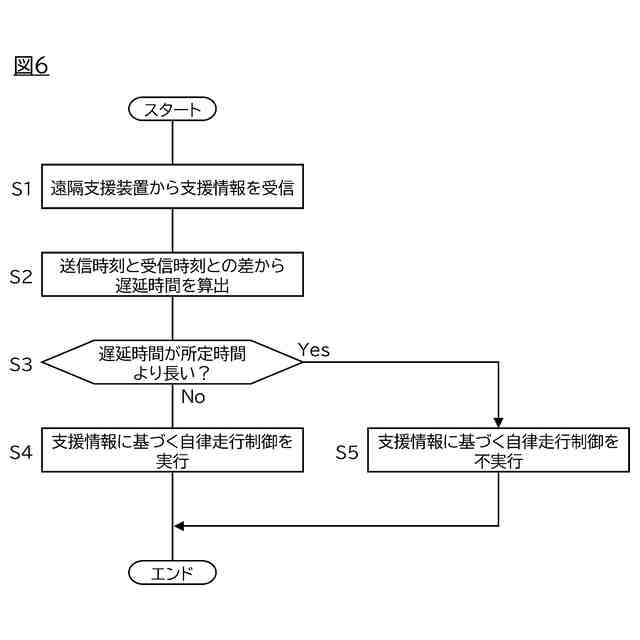
図1の遠隔支援システムにおける処理手順の一例を示すフローチャートである。
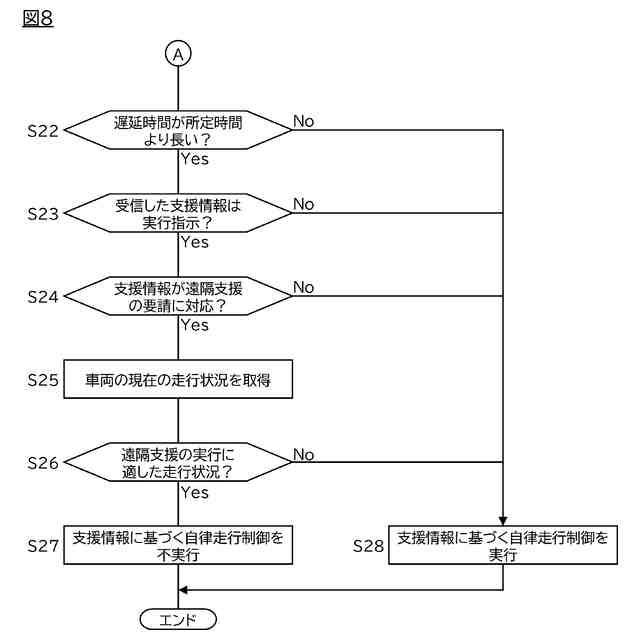
図1の遠隔支援システムにおける処理手順の他の例を示すフローチャートである(その1)。
図1の遠隔支援システムにおける処理手順の他の例を示すフローチャートである(その2)。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を図面に基づいて説明する。
【0010】
[遠隔支援システムの構成]
図1は、本発明に係る遠隔支援システム1を示すブロック図である。遠隔支援システム1は、車両の外部の操作者(オペレータ)が車両の運転支援を行うシステムである。例えば、自律走行制御により走行している車両が自律走行制御による走行を継続できなくなった場合に、遠隔支援システム1により、車両の外部の操作者が車両を遠隔操作する。車両の外部とは、車両の車体から離間した位置であれば特に限定されず、車両の走行を集中的に管理する管理センタなどの遠隔地が挙げられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日産自動車株式会社
カバー部材
今日
日産自動車株式会社
状態判定方法、状態判定装置及び状態判定用学習済みモデル
今日
住友電装株式会社
車載装置、プログラム及び情報処理方法
今日
個人
火器使用警報装置
1か月前
アズビル株式会社
測定システム
20日前
ニッタン株式会社
発信機
1か月前
日本信号株式会社
情報提供システム
22日前
日本無線株式会社
人物探索システム
今日
京セラ株式会社
案内システム及び案内方法
今日
個人
安全に飛び乗りが可能な低速自動運転車
8日前
株式会社F2Fグループ
疲労度判定方法
7日前
トヨタ自動車株式会社
照度推定装置
21日前
京セラ株式会社
表示システム
8日前
日本信号株式会社
遠隔監視システム
1か月前
能美防災株式会社
防災設備
14日前
株式会社創発システム研究所
交通検知システム
2日前
能美防災株式会社
加煙試験器
1か月前
能美防災株式会社
撮影機能付き発信機
1か月前
株式会社ケア・テック
警報システム
7日前
能美防災株式会社
防災制御盤
20日前
能美防災株式会社
避難経路通知システム
1か月前
トヨタ自動車株式会社
移動体
22日前
能美防災株式会社
警報転送装置
20日前
日置電機株式会社
試験システム
1か月前
株式会社バカン
情報処理装置、プログラム及び情報処理方法
28日前
トヨタ自動車株式会社
路面凹凸検出装置
7日前
能美防災株式会社
非常電話機能付き発信機
1か月前
三菱電機モビリティ株式会社
運転支援装置及び運転支援方法
1か月前
能美防災株式会社
防災システム
7日前
トヨタ自動車株式会社
運転支援装置
28日前
トヨタ自動車株式会社
表示システム
今日
能美防災株式会社
総合操作盤
1か月前
株式会社ミマモルメ
要保護者監視システム
今日
シャープ株式会社
測定システムおよび情報処理方法
1か月前
住友重機械工業株式会社
荷役車両及び荷役システム
28日前
トヨタ自動車株式会社
制御装置
14日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ