TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024155601
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023070452
出願日
2023-04-21
発明の名称
電動車両の制御方法、及び電動車両の制御システム
出願人
日産自動車株式会社
代理人
弁理士法人後藤特許事務所
主分類
B60L
15/20 20060101AFI20241024BHJP(車両一般)
要約
【課題】自車両と先行車両との車間距離に基づいて自車両の制動トルクを制御する場合において、ドライバーが意図しない制動トルクの低下を抑制する電動車両の制御方法、及び電動車両の制御システムを提供する。
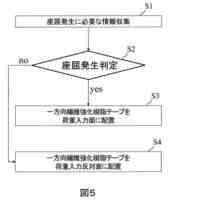
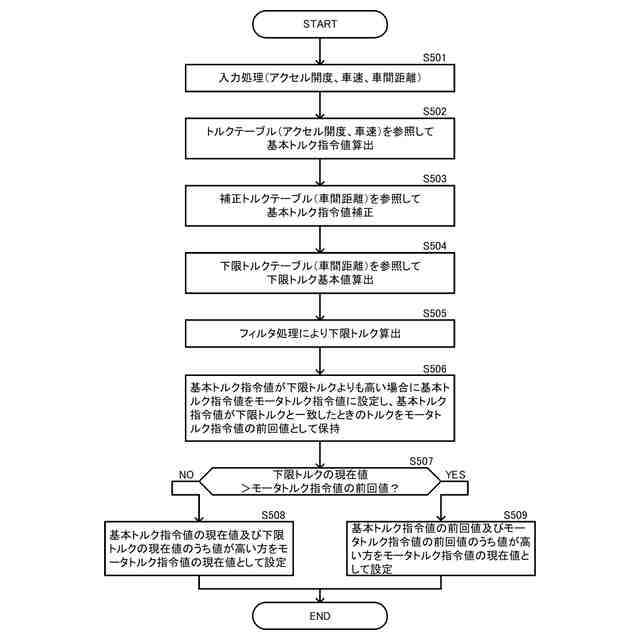
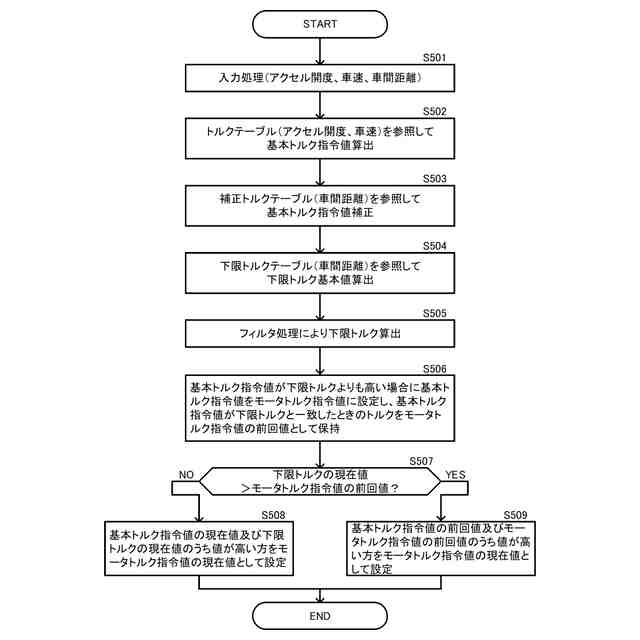
【解決手段】自車両と自車両の前方を走行する先行車両との車間距離が長くなるほど高くなる制動トルクとなる下限トルクを算出し、アクセル開度に基づいて生成される基本トルク指令値が下限トルクよりも高い場合に基本トルク指令値をモータトルク指令値に設定してモータトルク指令値に基づいて駆動モータを制御するとともに基本トルク指令値が下限トルクと一致したときのトルクをモータトルク指令値の前回値として保持し、下限トルクの現在値がモータトルク指令値の前回値よりも高い場合に、基本トルク指令値の現在値及びモータトルク指令値の前回値のうち値が高い方をモータトルク指令値の現在値として設定する。
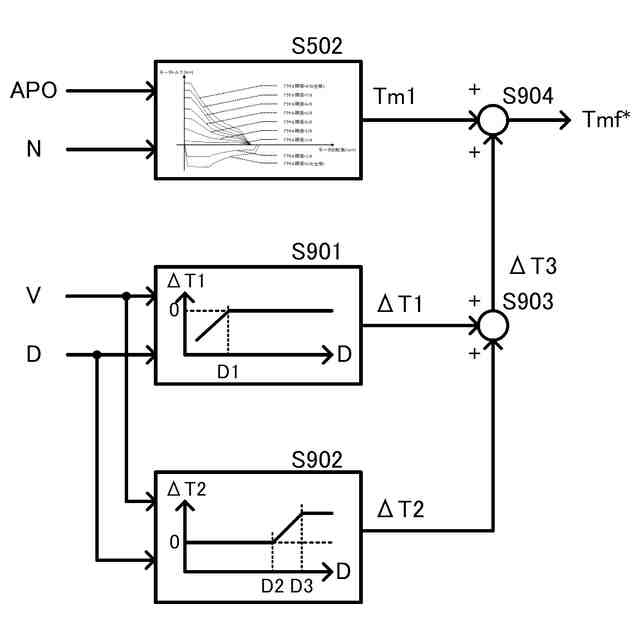
【選択図】図5
特許請求の範囲
【請求項1】
アクセル開度に基づいて基本トルク指令値を生成するとともに前記アクセル開度が減少するときの前記基本トルク指令値が自車両の駆動モータに対する制動トルクとなる電動車両の制御方法において、
前記制動トルクであって、前記自車両と前記自車両の前方を走行する先行車両との車間距離が長くなるほど、又は前記車間距離を前記自車両の車速で除算して得られる除算値が高くなるほど高くなる下限トルクを算出し、
前記基本トルク指令値が前記下限トルクよりも高い場合に前記基本トルク指令値をモータトルク指令値に設定して前記モータトルク指令値に基づいて前記駆動モータを制御するとともに前記基本トルク指令値が前記下限トルクと一致したときのトルクを前記モータトルク指令値の前回値として保持し、
前記下限トルクの現在値が前記モータトルク指令値の前回値以下の場合に、前記基本トルク指令値の現在値及び前記下限トルクの現在値のうち値が高い方を前記モータトルク指令値の現在値として設定し、
前記下限トルクの現在値が前記モータトルク指令値の前回値よりも高い場合に、前記基本トルク指令値の現在値及び前記モータトルク指令値の前回値のうち値が高い方を前記モータトルク指令値の現在値として設定する電動車両の制御方法。
続きを表示(約 740 文字)
【請求項2】
前記車間距離が所定の閾値以上のときにゼロであり、前記車間距離が前記閾値よりも低くなるとゼロよりも低くなるとともに前記車間距離が低くなるほど単調に低下する補正トルクを前記基本トルク指令値に加算する請求項1に記載の電動車両の制御方法。
【請求項3】
アクセル開度に基づいて基本トルク指令値を生成するとともに前記アクセル開度が減少するときの前記基本トルク指令値が自車両の駆動モータに対する制動トルクとなる電動車両の制御システムにおいて、
前記制動トルクであって、前記自車両と前記自車両の前方を走行する先行車両との車間距離が長くなるほど、又は前記車間距離を前記自車両の車速で除算して得られる除算値が高くなるほど高くなる下限トルクを算出する下限トルク算出部と、
前記基本トルク指令値が前記下限トルクよりも高い場合に前記基本トルク指令値をモータトルク指令値に設定して前記モータトルク指令値に基づいて前記駆動モータを制御するとともに前記基本トルク指令値が前記下限トルクと一致したときのトルクを前記モータトルク指令値の前回値として保持するモータトルク指令値設定部と、を含み、
前記モータトルク指令値設定部は、
前記下限トルクの現在値が前記モータトルク指令値の前回値以下の場合に、前記基本トルク指令値の現在値及び前記下限トルクの現在値のうち値が高い方を前記モータトルク指令値の現在値として設定し、
前記下限トルクの現在値が前記モータトルク指令値の前回値よりも高い場合に、前記基本トルク指令値の現在値及び前記モータトルク指令値の前回値のうち値が高い方を前記モータトルク指令値の現在値として設定する電動車両の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動車両の制御方法、及び電動車両の制御システムに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
アクセルペダルの操作のみで自車両の加減速を行う所謂1ペダルモードで電動車両10を走行させる技術が知られている。この技術において前方に先行車両がおらず一定速度で走行したい場合にもアクセルペダルを放すと減速しすぎてしまい違和感があった。同様にアクセルを緩めると、ドライバーの意図以上に減速しすぎて車速が低下してしまい、ドライバーが再加速することで燃費が悪化することがあった。これに対応して、電動車両において自車両と先行車両との車間距離に基づいて自車両の制動トルクを制御する技術が知られている(特許文献1参照)。この技術により、車間距離が長い場合は制動トルクが弱くなるため、交通状況に適した制動トルクとなり、ドライバーのアクセル操作の負担を軽減し、意図しない加減速による燃費の悪化を軽減できる。
【先行技術文献】
【特許文献】
【0003】
特許6625039号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、自車両が減速中に先行車両との車間距離が長くなる、又は先行車両が自車両の走行車線から離れた場合、ドライバーがアクセルペダルを用いた減速を行っているにもかかわらず制動トルクが小さくなり違和感が発生する。
【0005】
本発明は、自車両と先行車両との車間距離に基づいて自車両の制動トルクを制御する場合において、ドライバーが意図しない制動トルクの低下を抑制する電動車両の制御方法、及び電動車両の制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明による電動車両の制御方法は、アクセル開度に基づいて基本トルク指令値を生成するとともにアクセル開度が減少するときの基本トルク指令値が自車両の駆動モータに対する制動トルクとなる電動車両の制御方法である。この制御方法において、制動トルクであって、自車両と自車両の前方を走行する先行車両との車間距離が長くなるほど、又は車間距離を自車両の車速で除算して得られる除算値が高くなるほど高くなる下限トルクを算出し、基本トルク指令値が下限トルクよりも高い場合に基本トルク指令値をモータトルク指令値に設定してモータトルク指令値に基づいて駆動モータを制御するとともに基本トルク指令値が下限トルクと一致したときのトルクをモータトルク指令値の前回値として保持する。そして、下限トルクの現在値がモータトルク指令値の前回値以下の場合に、基本トルク指令値の現在値及び下限トルクの現在値のうち値が高い方をモータトルク指令値の現在値として設定する。また、下限トルクの現在値がモータトルク指令値の前回値よりも高い場合に、基本トルク指令値の現在値及びモータトルク指令値の前回値のうち値が高い方をモータトルク指令値の現在値として設定する。
【発明の効果】
【0007】
本発明によれば、下限トルクの現在値に関わらず基本トルク指令値の現在値がモータトルク指令値の前回値を超えるまで、モータトルク指令値、即ち制動トルクはモータトルク指令値の前回値による制動トルク以下となるので、ドライバーが意図しない制動トルクの低下を抑制できる。また、下限トルクの現在値がモータトルク指令値の前回値よりも低くなると、モータトルク指令値の現在値は下限トルクの現在値に設定されるので、車間距離が短くなる場合に制動トルクを増加させ、ドライバーのアクセルペダルの操作量を低減できる。
【図面の簡単な説明】
【0008】
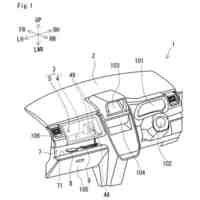
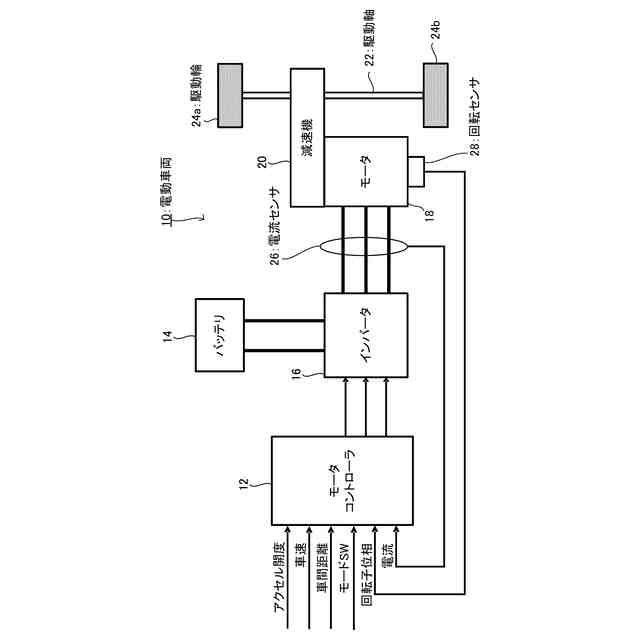
図1は、本実施形態の電動車両の制御方法が適用される電動車両システムの基本構成を説明するブロック図である。
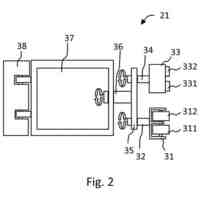
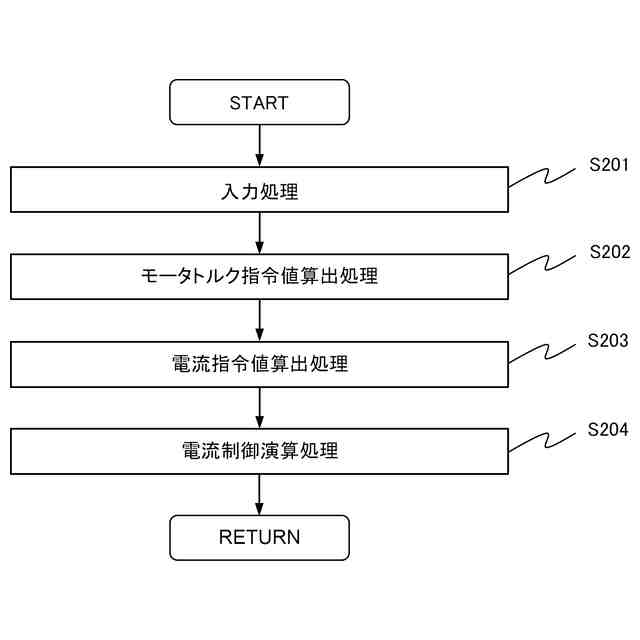
図2は、電動車両の駆動制御の主要な処理を説明するフローチャートである。
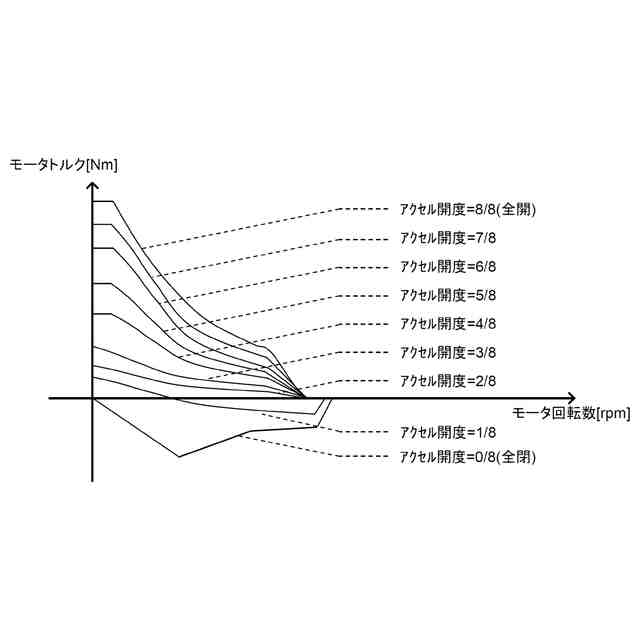
図3は、アクセルモードにおけるアクセル開度-トルクテーブルの一例を示す図である。
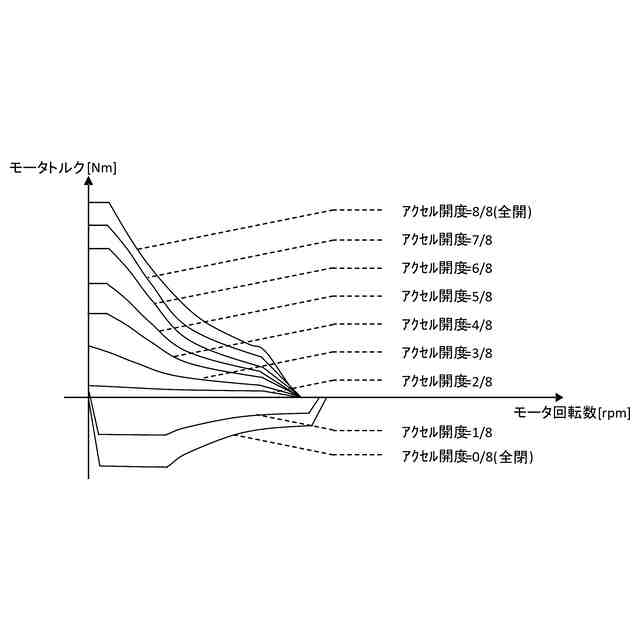
図4は、1ペダルモードにおけるアクセル開度-トルクテーブルの一例を示す図である。
図5は、モータトルク指令値算出処理を説明するフローチャートである。
図6は、アクセル開度に基づいて算出される基本トルク指令値に加算される補正トルクに関して、自車両と自車両の前方を走行する先行車両との車間距離との関係を示す補正トルクテーブルである。
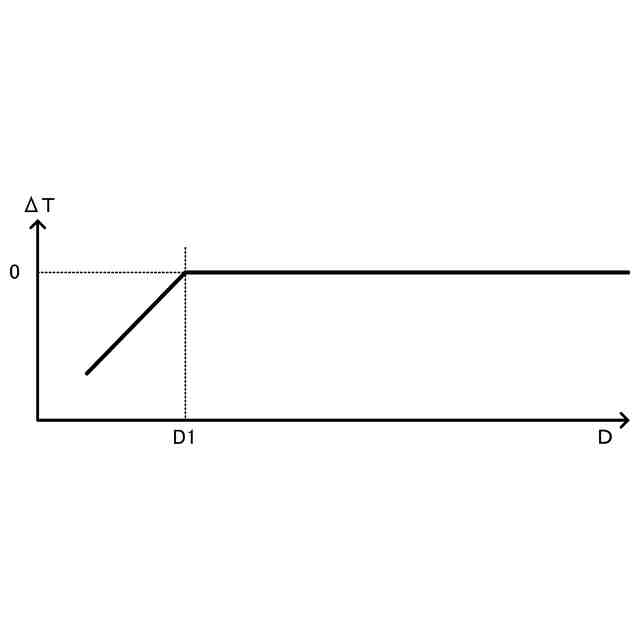
図7は、アクセル開度に基づいて算出される基本トルク指令値と比較される下限トルクに関して、自車両と自車両の前方を走行する先行車両との車間距離との関係を示す下限トルクテーブルである。
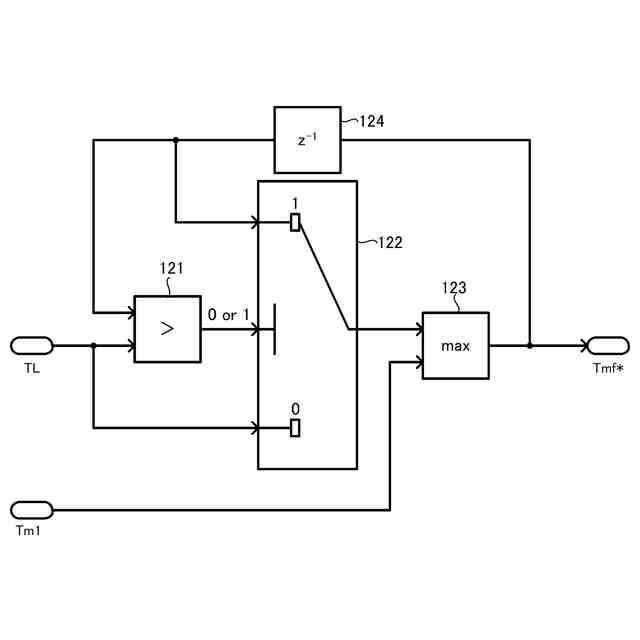
図8は、モータトルク指令値算出処理のロジックを示す図である。
図9は、比較例のモータトルク指令値の算出の流れを説明するための図である。
図10は、比較例で適用される基本トルク指令値と、第3の補正トルクと、モータトルク指令値と、アクセル開度との関係を示す図であって、図10(a)は第3の補正トルクと車間距離との関係、図10(b)は車速と基本トルク指令値を軸とする座標空間において、アクセル開度をゼロとしたときの基本トルク指令値の特性曲線に比較例の第3の補正トルクを適用したときのモータトルク指令値の分布、図10(c)は、アクセル開度と基本トルク指令値を軸とする座標空間において図10(b)に示す車速(V1)を一定としてアクセル開度を変化させた場合の基本トルク指令値の特性曲線と基本トルク指令値に対して比較例の第3の補正トルクを適用したときのモータトルク指令値の分布を示す。
図11は、本実施形態で適用され基本トルク指令値と、補正トルクと、モータトルク指令値と、アクセル開度との関係を示す図であって、図11(a)は補正トルクと車間距離との関係、図11(b)は車速Vと基本トルク指令値を軸とする座標空間において、アクセル開度をゼロとしたときの基本トルク指令値の特性曲線に本実施形態の補正トルクと下限トルクを適用したときのモータトルク指令値の分布、図11(c)は、アクセル開度と基本トルク指令値を軸とする座標空間において図11(b)に示す車速(V1)を一定としてアクセル開度を変化させた場合の基本トルク指令値の特性曲線と基本トルク指令値に対して本実施形態の補正トルクと下限トルクを適用したときのモータトルク指令値の分布を示す。
図12は、本実施形態の電動車両の制御方法(制御システム)により電動車両のアクセル開度を変化させたときに車間距離が変化する場合の、モータトルク指令値及び車速のタイムチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について説明する。
【0010】
<電動車両10のシステム構成>
図1は、本実施形態の電動車両10の制御装置を備えた電動車両10のシステム構成を示すブロック図である。電動車両10とは、車両の駆動源の一部又は全部としてモータ18を備え、モータ18の駆動力により走行可能な自動車のことであり、電気自動車や、ハイブリッド自動車が含まれる。なお、図1に示す電動車両10はモータ18を一つ搭載しているが、本実施形態はモータ18を複数搭載した構成にも適用できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両
2か月前
個人
眼科手術車
28日前
個人
授乳用車両
20日前
個人
自動車運転補助装置
2か月前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
6日前
井関農機株式会社
作業車両
20日前
個人
キャンピングトレーラー
1か月前
個人
台車用車輪止め具
29日前
個人
自動車外部装着用しめ飾り
2か月前
個人
謝意シグナル装着車
1か月前
日本精機株式会社
車載表示装置
2か月前
日本精機株式会社
車載表示装置
1か月前
エムケー精工株式会社
洗車装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
マツダ株式会社
車両
13日前
トヨタ自動車株式会社
車両
2か月前
トヨタ自動車株式会社
車両
29日前
株式会社青木製作所
タンクローリ
29日前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
20日前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
3か月前
株式会社小糸製作所
投影装置
17日前
東レ株式会社
車両用部材の補強方法
1か月前
ダイハツ工業株式会社
バッグ
3か月前
トヨタ自動車株式会社
搬送装置
2か月前
ダイハツ工業株式会社
車両構造
1か月前
YKS特許評価株式会社
自動車
2か月前
豊田合成株式会社
乗員保護装置
1日前
株式会社SUBARU
保護構造
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ