TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024154552
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023068420
出願日
2023-04-19
発明の名称
樹木の伐採方法、及びこの方法に用いる無人航空機
出願人
中国電力株式会社
代理人
弁理士法人一色国際特許事務所
主分類
A01G
23/08 20060101AFI20241024BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】樹木の伐採作業を効率よく安全に行う。
【解決手段】ワイヤーソーの一端を無人航空機に取り付け、ワイヤーソーの他端を地上で保持しつつ無人航空機を伐採の対象となる枝に向けて飛行させ、枝の上方を通過させることによりワイヤーソーを枝に掛け、無人航空機を降下させてワイヤーソーの一端を無人航空機から取り外し、ワイヤーソーを枝に接触させつつ、ワイヤーソーの一端及び他端を交互に引く操作を繰り返すことにより枝を切断する。無人航空機は、一つ以上の回転翼を有する本体と、ワイヤーソーの取付機構と、を備え、ワイヤーソーの一端を、回転翼よりも外周側に位置するように上記取付機構により無人航空機に取り付ける。上記取付機構は、無人航空機の外周方向に延出するアームと、アームの先端に設けられ、ワイヤーソーの一端が掛止されるフックと、を有する。
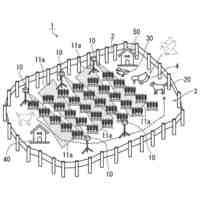
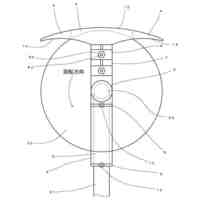
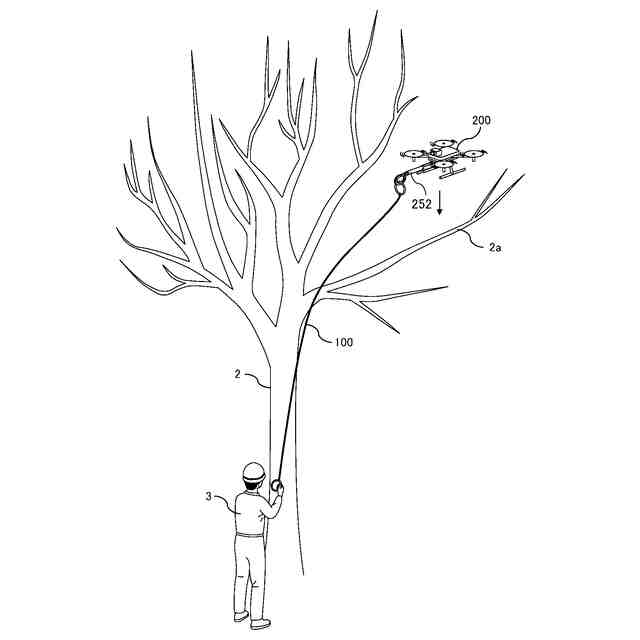
【選択図】図1
特許請求の範囲
【請求項1】
ワイヤーソーの一端を無人航空機に取り付け、
前記ワイヤーソーの他端を地上で保持しつつ前記無人航空機を伐採の対象となる枝に向けて飛行させ、
前記枝の上方を通過させることにより前記ワイヤーソーを前記枝に掛け、
前記無人航空機を降下させて前記ワイヤーソーの前記一端を前記無人航空機から取り外し、
前記ワイヤーソーを前記枝に接触させつつ、前記ワイヤーソーの前記一端及び前記他端を交互に引く操作を繰り返すことにより前記枝を切断する、
樹木の伐採方法。
続きを表示(約 820 文字)
【請求項2】
請求項1に記載の樹木の伐採方法であって、
前記無人航空機は、
一つ以上の回転翼を有する本体と、
前記ワイヤーソーの取付機構と、
を備え、
前記ワイヤーソーの前記一端を、前記回転翼よりも外周側に位置するように前記ワイヤーソーの取付機構により前記無人航空機に取り付ける、
樹木の伐採方法。
【請求項3】
請求項1に記載の樹木の伐採方法であって、
前記ワイヤーソーの他端側にて前記ワイヤーソーのワイヤーを回転ドラムに巻回しておき、前記無人航空機の飛行に伴い前記ワイヤーが送り出されるようにする、
樹木の伐採方法。
【請求項4】
請求項1乃至3のいずれか一項に記載の樹木の伐採方法であって、
前記無人航空機は、マルチコプタ又はヘリコプタである、
樹木の伐採方法。
【請求項5】
請求項2に記載の樹木の伐採方法における前記無人航空機であって、
前記本体及び前記取付機構を備え、
前記取付機構は、
前記無人航空機の外周方向に延出するアームと、
前記アームの先端に設けられ、前記ワイヤーソーの前記一端が掛止されるフックと、
を有する、
無人航空機。
【請求項6】
請求項5に記載の無人航空機であって、
前記取付機構は、前記アームをその先端が上下に移動可能な状態で支持する、
無人航空機。
【請求項7】
請求項5に記載の無人航空機であって、
前記取付機構は、前記ワイヤーソーから前記アームが受ける力の前記本体への伝達を緩衝する緩衝機構を有する、
無人航空機。
【請求項8】
請求項5に記載の無人航空機であって、
前記アームは伸縮自在な構造を有する、
無人航空機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、樹木の伐採方法、及びこの方法に用いる無人航空機に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ダムや水力発電所においては、設備の周辺に成長した樹木の枝葉が、各種の設備や施設(水圧鉄管、水槽(サージタンク)、水槽用電源、通信ケーブル等)の保安維持や、ダム池内堆積土砂測量等の諸量計測の支障となる。このため、作業者は、高枝切りバサミやチェーンソー、ノコギリ等の工具を用いて樹木の枝打ちや根元からの伐採を行っている。また、伐採対象となる枝が樹木の高所に存在する場合には、作業者は樹木によじ登って対応している。このように樹木の伐採に際し作業者は危険な重労働を強いられている。
【0003】
こうした樹木の伐採作業を支援する技術として、例えば、特許文献1には、ドローン等の無人航空機に剪定構造(ハサミ、ノコギリ、カッター、レーザーカッター、ウォーターカッター等)を搭載して樹木の伐採を行うことが記載されている。また、特許文献2には、樹木の幹に追い口を設け、ワイヤーソーの本体のワイヤーの繰出し位置及び本体を樹木に固定する固定具が追い口よりも低い位置になるように固定具によって本体を樹木の幹に固定し、ワイヤーで樹木の幹を囲みワイヤーを追い口に掛止させ、ワイヤーソーを遠隔操作可能なリモコンの操作によってワイヤーを樹木の幹周りに周動させることが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-120440号公報
特開2018-130090号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のように無人航空機に剪定構造を搭載して枝を伐採する場合には、樹木との接触を防ぐとともにバッテリの消費を抑えて飛行時間を確保するため、無人航空機やこれに搭載する剪定構造(剪定工具)については可能な限り小型であることが望ましい。一方で、小型の剪定構造では径の太い枝の伐採に対応することができず、また、伐採時に樹木から受ける反作用により無人航空機の飛行が不安定となり、作業効率や安全性の面で課題がある。また、特許文献2に記載された伐採装置は、倒木のために樹木の幹を地上付近で切断するものであり、樹木の高所に存在する枝を伐採することを想定した構成にはなっていない。
【0006】
本発明は、このような背景に鑑みてなされたものであり、樹木の伐採作業を効率よく安全に行うことが可能な、樹木の伐採方法、及びこの方法に用いる無人航空機を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するための本発明の一つは、樹木の伐採方法であって、ワイヤーソーの一端を無人航空機に取り付け、前記ワイヤーソーの他端を地上で保持しつつ前記無人航空機を伐採の対象となる枝に向けて飛行させ、前記枝の上方を通過させることにより前記ワイヤーソーを前記枝に掛け、前記無人航空機を降下させて前記ワイヤーソーの前記一端を前記無人航空機から取り外し、前記枝に接触させつつ、前記ワイヤーソーの前記一端及び前記他端を交互に引く操作を繰り返すことにより前記枝を伐採する。
【0008】
その他、本願が開示する課題、及びその解決方法は、発明を実施するための形態の欄、及び図面により明らかにされる。
【発明の効果】
【0009】
本発明によれば、樹木の伐採作業を効率よく安全に行うことができる。
【図面の簡単な説明】
【0010】
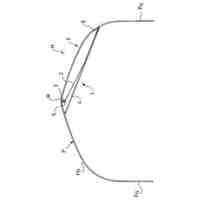
本発明による樹木の伐採方法の概略を説明する模式図である。
本発明による樹木の伐採方法の概略を説明するフローチャートである。
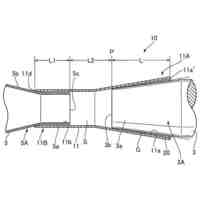
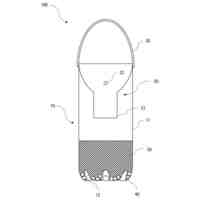
ワイヤーソーの一例を示す図である。
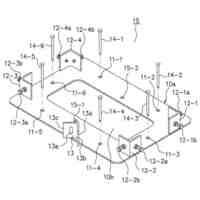
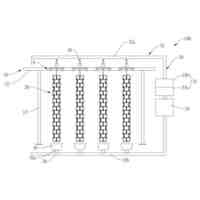
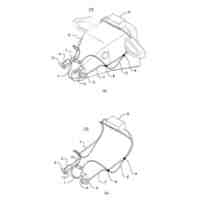
無人航空機の構成を示す外観斜視図である。
無人航空機の構成を示す外観斜視図である。
無人航空機が飛行している際のアームの状態を示す図である。
無人航空機が飛行している際のアームの状態を示す図である。
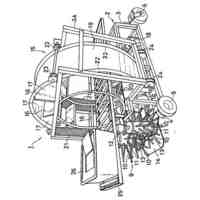
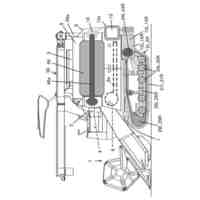
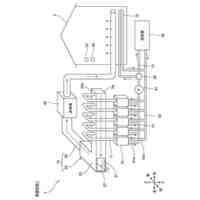
無人航空機の主な構成を示す図である。
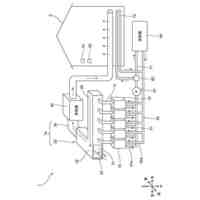
無人航空機が備える主な機能を説明する図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
柄杓じょうろ
20日前
個人
ペット用リード
9日前
個人
植物の栽培管理システム
20日前
株式会社ウエ・ルコ
ダニ捕獲器
7日前
株式会社共和
果実回し具
20日前
個人
養殖システム
6日前
株式会社大貴
動物用トイレ
7日前
井関農機株式会社
作業車両
7日前
伊東電機株式会社
植物栽培装置
20日前
個人
魚介類養殖システム
6日前
マコー株式会社
水生生物育成装置
20日前
東都興業株式会社
シート巻取り装置
7日前
グローブライド株式会社
釣竿
20日前
いであ株式会社
害鳥獣防除システム
6日前
株式会社和田電業社
遠隔操作切断装置
7日前
個人
除菌装置
6日前
マクロス株式会社
鶏の捕獲及び籠詰め機
21日前
株式会社デンソー
栽培装置
1日前
株式会社クボタ
歩行型作業機
7日前
帝人フロンティア株式会社
植物栽培用培地
7日前
株式会社クボタ
歩行型作業機
7日前
個人
草刈機用安全カバーおよび草刈機
20日前
アルスコーポレーション株式会社
剪定鋏
13日前
アキシオン株式会社
養殖システム及び養殖方法
20日前
アキシオン株式会社
養殖システム及び養殖方法
20日前
井関農機株式会社
作業車両
8日前
長煬科技有限公司
植栽システム
13日前
井関農機株式会社
作業車両
20日前
日本フレックス工業株式会社
ケーブル式手動遠隔操作装置
20日前
井関農機株式会社
収穫機
20日前
株式会社ノーリツ
供給システム
20日前
株式会社タツノ
家畜の呼気測定装置及び測定システム
14日前
株式会社ノーリツ
供給システム
20日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
7日前
株式会社シマノ
ルアー
20日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ