TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024152529
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023066773
出願日
2023-04-14
発明の名称
自動測定システムおよび自動測定システムの制御方法
出願人
株式会社ミツトヨ
代理人
個人
主分類
B25J
13/08 20060101AFI20241018BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】測定を自動化できる自動測定システムおよび自動測定の制御方法を提供する。
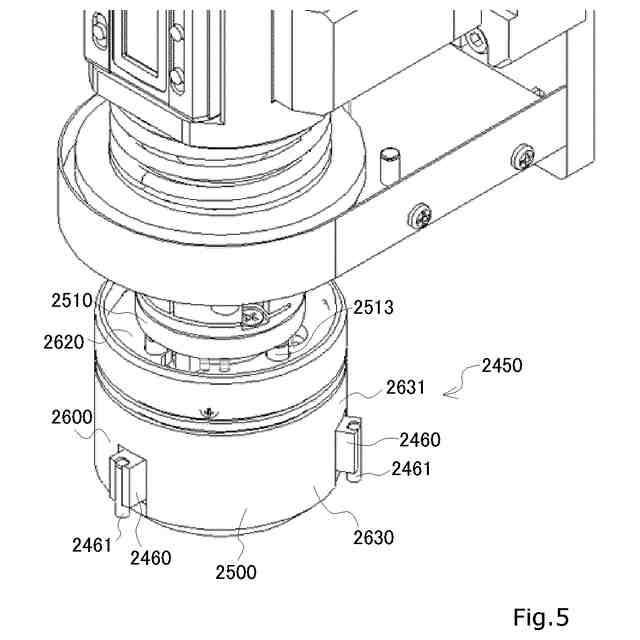
【解決手段】自動測定システムは、測定子によって測定対象物の表面を検出することにより、測定対象物の寸法または形状を測定するための測定センサツールと、測定センサツールを測定対象物に対して相対移動させる多軸の移動機構と、を備える。測定センサツールには、測定子を保護するためのカバー部が設けられ、
移動機構によって測定センサツールが測定対象物の測定対象箇所にアプローチするアプローチ工程において、カバー部は、測定子を当該カバー部の内側に収容している。アプローチ工程の終了後、測定子がカバー部から露出して、測定子が測定対象物の表面を検出する。
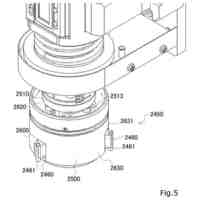
【選択図】図5
特許請求の範囲
【請求項1】
測定子によって測定対象物の表面を検出することにより、前記測定対象物の寸法または形状を測定するための測定センサツールと、
前記測定センサツールを前記測定対象物に対して相対移動させる移動機構と、を備えた自動測定システムであって、
前記測定センサツールには、前記測定子を保護するためのカバー部が設けられ、
前記移動機構によって前記測定センサツールが前記測定対象物の測定対象箇所にアプローチするアプローチ工程において、前記カバー部は、前記測定子を当該カバー部の内側に収容し、
前記アプローチ工程の終了後、前記測定子が前記カバー部から露出して、前記測定子が前記測定対象物の表面を検出する
ことを特徴とする自動測定システム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の自動測定システムにおいて、
前記カバー部と前記測定対象物との接触を検出するカバー接触検出手段を有し、
前記アプローチ工程において、前記カバー接触検出手段によって前記カバー部と前記測定対象物との接触が検出されたとき、前記移動機構は、前記測定センサツールと前記測定対象物との相対移動を停止させる、または、前記測定センサツールと前記測定対象物とをその時の移動方向とは反対方向に相対移動させる
ことを特徴とする自動測定システム。
【請求項3】
請求項1に記載の自動測定システムにおいて、
前記カバー部と前記測定対象物との接触を検出するカバー接触検出手段を有し、
前記アプローチ工程において、前記カバー接触検出手段によって前記カバー部と前記測定対象物との接触が検出されたとき、前記移動機構は、前記測定対象物から前記カバー部に係る作用力が小さくなる方向に前記測定センサツールと前記測定対象物とを相対移動させる
ことを特徴とする自動測定システム。
【請求項4】
請求項1に記載の自動測定システムにおいて、
前記測定センサツールは、一または複数の前記測定子を所定測定圧で前記測定対象物に接触させることによって前記測定対象物の寸法または形状を取得するものであって、
一または複数の前記測定子が前記測定対象物から受ける力の向きと大きさを検出する力検出手段を有し、
前記力検出手段は、前記測定センサツール、または、前記測定センサツールを前記移動機構に取り付ける取付コラムに設けられており、
前記移動機構は、前記力検出手段によって検出された前記力に基づいて、一または複数の前記測定子の測定圧が前記所定の測定圧になるように前記測定センサツールと前記測定対象物とを相対移動させる
ことを特徴とする自動測定システム。
【請求項5】
請求項1に記載の自動測定システムにおいて、
前記測定子は、非接触で測定対象物の表面を検出する非接触式のプローブである
ことを特徴とする自動測定システム。
【請求項6】
請求項1に記載の自動測定システムにおいて、
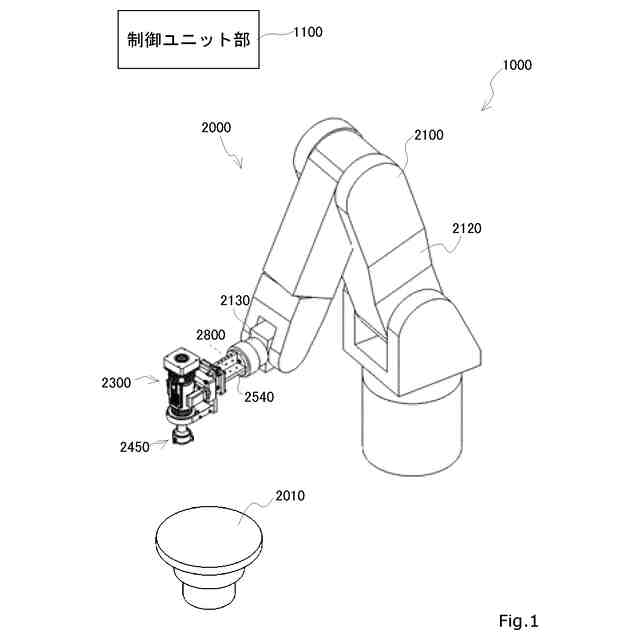
前記移動機構は、多関節ロボットであって、
前記測定センサツールは、前記多関節ロボットの手先部によって支持されており、
前記手先部と前記測定センサツールとの間に、前記手先部と前記測定センサツールとの相対位置ずれを吸収可能であってかつ前記手先部と前記測定センサツールとの相対位置を復帰可能とするコンプライアンス機構が設けられ、
前記アプローチ工程において、前記カバー部と前記測定対象物とが接触したとき、前記手先部と前記測定センサツールとの相対位置ずれを前記コンプライアンス機構によって吸収しながら前記測定センサツールを前記測定対象箇所にアプローチさせ、このとき、前記測定センサツールと前記測定対象箇所との相対姿勢が自動的に調節され、
前記アプローチ工程の終了後、前記移動機構が停止した状態で、前記測定子が前記カバー部から露出して、前記測定子が前記測定対象物の表面を検出する
ことを特徴とする自動測定システム。
【請求項7】
測定子によって測定対象物の表面を検出することにより、前記測定対象物の寸法または形状を測定するための測定センサツールと、
前記測定センサツールを前記測定対象物に対して相対移動させる移動機構と、を備え、
前記測定センサツールには、前記測定子を保護するためのカバー部が設けられている自動測定システムの制御方法であって、
前記カバー部が、前記測定子を当該カバー部の内側に収容し、
前記移動機構によって前記測定センサツールを前記測定対象物の測定対象箇所にアプローチさせ、
前記アプローチの終了後、前記移動機構が停止した状態で、前記測定子が前記カバー部から露出して、前記測定子が前記測定対象物の表面を検出する
ことを特徴とする自動測定システムの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動測定システムおよび自動測定システムの制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
穴の内径を測定する測定器として、ホールテスト、シリンダーゲージ、ボアマチック(登録商標)等の内径測定器が使用されている(例えば、特許文献1参照)。ただ、これら内径測定器の使用にあたっては、測定子を進退させたり、内径測定器を穴に挿入した状態である程度求心したりする作業などが必要になるので、どうしても人手による手動測定ということになる。そのため、このような内径測定器で穴の加工精度を確認するためには人手と時間がかかっていた。
【0003】
手動測定の代替手段として、生産現場において内径測定を自動化する内径測定装置としては、空気マイクロメータがある(例えば、特許文献2参照)。空気マイクロメータは、穴に差し入れて、空気を吹き出すだけであるから、現在の選択肢のなかでいうと、空気マイクロメータは、内径測定の自動化に適した測定装置であると言える。
【先行技術文献】
【特許文献】
【0004】
特開2010-19783
特開平8-14871
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、空気マイクロメータには次のようなデメリットもある。
まず、空気マイクロメータは、その仕組み上、非常に高価なものになってしまう。また、エアコンプレッサを用意したり整備したりしなければならない。測定能力の面でも、その仕組み上、空気マイクロメータの繰り返し精度には限界があり、また、測定範囲が極めて短い(数100マイクロメートル程度)ものとなってしまう。
【0006】
手動式の測定器を用いる手動測定に共通する問題として、なるべく安価に測定を自動化したいという要求があった。
【0007】
安価で使い勝手がよく、測定範囲が広く、なおかつ、測定を自動化できる自動測定システムおよび自動測定の制御方法が求められている。
【課題を解決するための手段】
【0008】
本発明の自動測定システムは、
測定子によって測定対象物の表面を検出することにより、前記測定対象物の寸法または形状を測定するための測定センサツールと、
前記測定センサツールを前記測定対象物に対して相対移動させる移動機構と、を備えた自動測定システムであって、
前記測定センサツールには、前記測定子を保護するためのカバー部が設けられ、
前記移動機構によって前記測定センサツールが前記測定対象物の測定対象箇所にアプローチするアプローチ工程において、前記カバー部は、前記測定子を当該カバー部の内側に収容し、
前記アプローチ工程の終了後、前記測定子が前記カバー部から露出して、前記測定子が前記測定対象物の表面を検出する
ことを特徴とする。
【0009】
本発明の一実施形態では、
前記カバー部と前記測定対象物との接触を検出するカバー接触検出手段を有し、
前記アプローチ工程において、前記カバー接触検出手段によって前記カバー部と前記測定対象物との接触が検出されたとき、前記移動機構は、前記測定センサツールと前記測定対象物との相対移動を停止させる、または、前記測定センサツールと前記測定対象物とをその時の移動方向とは反対方向に相対移動させる
ことが好ましい。
【0010】
本発明の一実施形態では、
前記カバー部と前記測定対象物との接触を検出するカバー接触検出手段を有し、
前記アプローチ工程において、前記カバー接触検出手段によって前記カバー部と前記測定対象物との接触が検出されたとき、前記移動機構は、前記測定対象物から前記カバー部に係る作用力が小さくなる方向に前記測定センサツールと前記測定対象物とを相対移動させる
ことが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ミツトヨ
検出器検知装置および測定機
1か月前
株式会社ミツトヨ
計測装置及びアブソリュート角度特定方法
29日前
株式会社ミツトヨ
自動測定システムおよび自動測定システムの制御方法
22日前
株式会社ミツトヨ
自動測定システムおよび自動測定システムの制御方法
22日前
株式会社ミツトヨ
校正用データの取得方法、測定値の補正方法、および表面性状測定機
9日前
個人
木製ハンマー
2か月前
個人
関節モジュール
2か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
2か月前
太陽工業株式会社
チャック装置
1か月前
コクヨ株式会社
補助器具
2か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
衝撃工具
4か月前
個人
メンテナンス用スタンド
4か月前
東京計器株式会社
接触検知装置
3か月前
CKD株式会社
把持装置
2か月前
学校法人立命館
グリッパ
2か月前
川崎重工業株式会社
罫書用治具
5か月前
株式会社マキタ
打撃工具
8日前
株式会社マキタ
動力工具
5か月前
オムロン株式会社
電動把持工具
2か月前
トヨタ自動車株式会社
ロボット
3か月前
個人
容器引っ掛け棒およびその使用方法
4か月前
株式会社マキタ
電動ハンマ
22日前
株式会社ダイヘン
制御装置
16日前
株式会社ダイヘン
搬送装置
1か月前
トヨタ自動車株式会社
ハンド構造
4か月前
白山工業株式会社
ロボットアーム
2か月前
個人
回転工具およびバリ取り部品
3か月前
株式会社ハーモ
開閉チャック装置
3か月前
株式会社ダイヘン
搬送装置
8日前
株式会社エビス
携帯付属物取付具
8日前
トヨタ自動車株式会社
締付判定方法
3か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ