TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024150529
公報種別
公開特許公報(A)
公開日
2024-10-23
出願番号
2024111472,2022559800
出願日
2024-07-11,2021-04-01
発明の名称
非生物学的な可動の空中ターゲットの早期検出のためのシステムおよび方法
出願人
サ-コス コーポレイション
代理人
弁理士法人ITOH
主分類
F41H
13/00 20060101AFI20241016BHJP(武器)
要約
【課題】UAVの早期検出および無効化に対する解決策を提供すること。
【解決手段】空中ターゲットについて、1つまたは複数のカメラで空中風景の所定のエリアをスキャンすることと、1つまたは複数のカメラで空中ターゲットの複数の画像をキャプチャすることと、ここで、1つまたは複数のカメラはプロセッサと通信している、を行うためのシステムおよび方法が開示される。空中ターゲットの2次元画像のジオメトリの変化を含む、空中ターゲットの複数の画像間の微視的な時間的変動が増幅される。
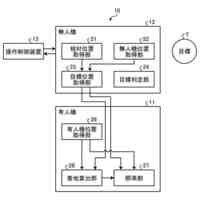
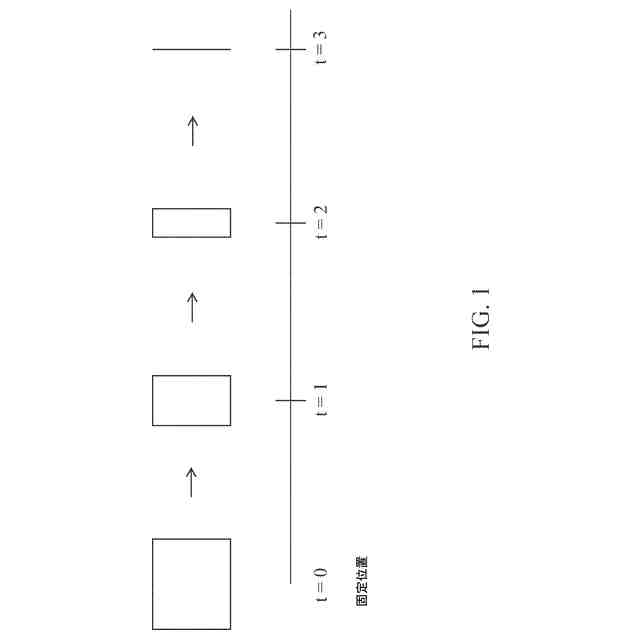
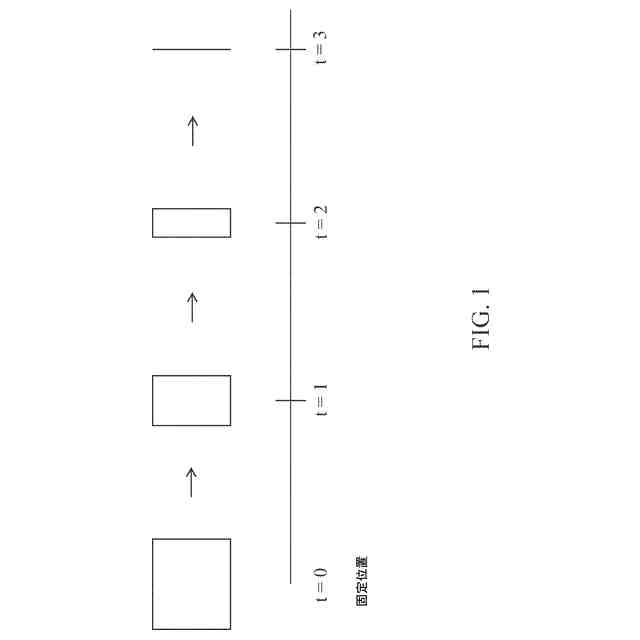
【選択図】図1
特許請求の範囲
【請求項1】
遠方の未知のターゲットを分類する方法であって、
空中ターゲットについて、1つまたは複数のカメラで空中風景の所定のエリアをスキャンすることと、
前記1つまたは複数のカメラで前記空中ターゲットの複数の画像をキャプチャすることであって、前記1つまたは複数のカメラはプロセッサと通信している、こと、
400nm~700nmの周波数範囲における前記空中ターゲットの前記複数の画像間の微視的な時間的変動を増幅させることであって、検出した少なくとも1つの前記微視的な時間的変動には、前記空中ターゲットの2次元画像のジオメトリの変化が含まれる、こと、
前記空中ターゲットの前記画像の前記ジオメトリの変化を検出した後に、700nm~1100nmの前記周波数範囲における前記空中ターゲットの強度値を検出すること、及び
前記空中ターゲットの前記強度値の時間変化率を連続的に示すプロファイルを、既知の空中の生物学的または非生物学的な対象の強度値の時間変化率を連続的に示すプロファイルと比較して、前記空中ターゲットが既知の生物学的な対象または非生物学的な対象であるかを判定すること、を含む、
方法。
続きを表示(約 2,000 文字)
【請求項2】
前記ターゲットの前記2次元画像の前記ジオメトリの検出した少なくとも1つの微視的な時間的変動の変化率のプロファイルを生成することと、
前記ターゲットの前記プロファイルを、複数の既知の空中の生物学的または非生物学的な対象の既存の集約プロファイルと比較することであって、前記集約プロファイルは、前記既知の空中の生物学的または非生物学的な対象の前記2次元画像のジオメトリの前記検出した少なくとも1つの微視的な時間的変動に対応する、こと、及び
前記空中ターゲットの前記プロファイルと前記複数の既知のターゲットの前記集約プロファイルとの間の差を検出し、前記空中ターゲットが前記既知のターゲットのうちの1つである確率を決定すること、をさらに含む、請求項1に記載の方法。
【請求項3】
前記空中ターゲットが非生物学的な対象である前記確率が所定の値を超えた場合、防御対策を実施することをさらに含む、請求項2に記載の方法。
【請求項4】
前記所定の値が50パーセントより大きい、請求項3に記載の方法。
【請求項5】
前記防御対策は、前記空中ターゲットに向けて妨害信号を伝搬すること、前記空中ターゲットに向けてミサイルを発射すること、前記空中ターゲットを捕獲するためのシステムを発射すること、および/または前記空中ターゲットを射撃すること、または他の手段によって前記空中ターゲットを無効にすることのうちの1つまたは複数を含む、請求項3に記載の方法。
【請求項6】
移動空中ターゲットを分類するように構成されたシステムであって、
1つまたは複数のプロセッサと通信しているカメラと、
前記1つまたは複数のプロセッサのうちの少なくとも1つに動作可能に結合され、命令が記憶されている1つまたは複数のメモリと、を備え、
前記命令が、前記1つまたは複数のプロセッサのうちの少なくとも1つによって実行されると、前記システムに、
前記移動空中ターゲットの複数の画像をキャプチャすることであって、前記画像は、400nm~700nmの範囲の第1の帯域および700nm~1100nmの範囲の第2の帯域の光の周波数においてキャプチャされる、こと、
前記移動空中ターゲットの前記複数の画像間の微視的な時間的変動を増幅させ、前記第1の帯域における前記移動空中ターゲットの2次元画像のジオメトリの検出した少なくとも1つの微視的な時間的変動の変化率のプロファイルを生成すること、及び
前記第2の帯域においてキャプチャされた前記移動空中ターゲットの前記画像に基づいて前記移動空中ターゲットの色強度値を測定し、前記色強度値の時間変化率を連続的に示すプロファイルを、空中の生物学的な対象および非生物学的な対象に対応する既知の色強度値の時間変化率を連続的に示すプロファイルと比較すること、を行わせる、
システム。
【請求項7】
前記1つまたは複数のメモリは、その上に記憶された命令をさらに含み、該命令が、前記1つまたは複数のプロセッサのうちの少なくとも1つによって実行されると、前記システムに、
前記対象の前記プロファイルを、複数の既知の可動の生物学的または非生物学的な対象の既存の集約プロファイルと比較することであって、前記集約プロファイルは、前記既知の可動の生物学的または非生物学的なターゲットの前記2次元画像のジオメトリの前記検出した少なくとも1つの微視的な時間的変動に対応する、こと、
前記移動空中ターゲットの前記プロファイルと前記複数の既知のターゲットの前記集約プロファイルとの間の差を検出すること、及び
前記移動空中ターゲットが前記既知のターゲットのうちの1つである確率を決定すること、を行わせる、請求項6に記載のシステム。
【請求項8】
前記移動空中ターゲットに向けられた無線信号を伝搬するように構成された送信機をさらに備える、請求項6に記載のシステム。
【請求項9】
前記カメラおよび送信機は、無人航空機に搭載される、請求項8に記載のシステム。
【請求項10】
前記1つまたは複数のメモリは、その上に記憶された命令をさらに含み、該命令が、前記1つまたは複数のプロセッサのうちの少なくとも1つによって実行されると、前記システムに、
前記無線信号を受けた前記移動空中ターゲットの前記プロファイルと、無線信号を受けた複数の既知の対象の集約プロファイルとの間の差を検出すること、及び
前記移動空中ターゲットが前記既知のターゲットのうちの1つである確率を決定することを行わせる、請求項8に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
[関連出願]
本出願は、2020年4月1日に出願された「System and Methods for Early Detection of Non-Biological Mobile Aerial Target」と題する米国仮出願第63/003,711号の利益を主張し、その全体は参照により本明細書に組み込まれる。
続きを表示(約 3,400 文字)
【0002】
[技術分野]
本技術は、非生物学的な可動の空中物体の早期検出および識別のための改善されたデバイス、方法、およびシステムに関する。より詳細には、本技術は、3次元空間における物体のジオメトリの微視的な変化に基づいて無人航空機の存在を検出するためのデバイス、方法、およびシステムに関する。
【背景技術】
【0003】
連邦航空局(FAA)は、米国で飛行している無人航空機(UAV)の数が30,000台にも上るとの見方を示している。これは、UAVによる攻撃または制限された空域へのUAVによる他の望ましくない侵入から第三者の安全性を維持することに関心がある者にとって問題である。UAVに取り付けられ得る自己推進式軍需品の範囲を考慮すると、UAVの早期検出が最も重要な関心事である。音響センサまたはレーダは、より小型のUAVの低速および低電磁シグネチャを検出できない場合がある。同様に、音響センサは、ターゲットUAVを識別しようとするセンサの対気速度およびベクトルと一致する対気速度およびベクトルを有するUAVを検出できない場合がある。赤外線センサおよび他のセンサは、遠く離れた距離にある生物学的なターゲットと非生物学的なターゲットとを区別することが困難な場合がある。UAV衝突を検出し回避するための研究が行われてきた。しかしながら、UAVの早期検出および無効化に対する解決策はない。
【発明の概要】
【0004】
本技術の範囲を限定するものではないが、本技術の一態様では、遠方の未知のターゲットを分類する方法であって、空中ターゲットについて、1つまたは複数のカメラで空中風景の所定のエリアをスキャンすることと、1つまたは複数のカメラで空中ターゲットの複数の画像をキャプチャすることとを含み、ここで、1つまたは複数のカメラはプロセッサと通信している、方法が開示される。空中ターゲットの複数の画像間の微視的な時間的変動が増幅され、ここで、少なくとも1つの微視的な時間的検出変動は、空中ターゲットの2次元画像のジオメトリの変化を含む。空中ターゲットの画像のジオメトリの変化を検出した後に、本方法は、空中ターゲットの強度値を検出することをさらに含む。
【0005】
本技術の別の態様では、ターゲットの2次元画像のジオメトリの少なくとも1つの微視的な時間的検出変動の変化率のプロファイルを生成することと、ターゲットのプロファイルを、複数の既知の空中の生物学的または非生物学的な対象の既存の集約プロファイルと比較することとを含む方法であって、ここで、集約プロファイルは、既知の空中の生物学的または非生物学的な対象の2次元画像のジオメトリの少なくとも1つの微視的な時間的検出変動に対応する、方法が開示される。本方法は、空中ターゲットのプロファイルと複数の既知のターゲットの集約プロファイルとの間の差を検出し、空中ターゲットが既知のターゲットのうちの1つである確率を決定することをさらに含む。
【0006】
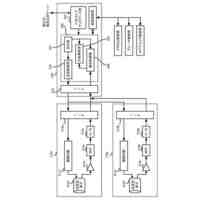
本技術の別の態様では、移動空中ターゲットを分類するように構成されたシステムであって、1つまたは複数のプロセッサと通信しているカメラと、1つまたは複数のプロセッサのうちの少なくとも1つに動作可能に結合され、命令が記憶されている1つまたは複数のメモリとを備えるシステムが開示される。1つまたは複数のプロセッサのうちの少なくとも1つによって実行されると、命令は、システムに、移動空中ターゲットの複数の画像をキャプチャさせ、ここで、画像は、400nm~700nmの範囲の第1の帯域および700nm~1100nmの範囲の第2の帯域の光の周波数においてキャプチャされる。命令はさらに、システムに、ターゲットの複数の画像間の微視的な時間的変動を増幅させ、第1の帯域におけるターゲットの2次元画像のジオメトリの少なくとも1つの微視的な時間的検出変動の変化率のプロファイルを生成することを行わせる。そして、第2の帯域においてキャプチャされた空中ターゲットの画像に基づいて移動空中ターゲットの色強度値を測定させ、色強度値を、空中の生物学的な対象および非生物学的な対象に対応する既知の色強度値のプロファイルと比較させる。
【0007】
本技術の別の態様では、移動空中ターゲットを分類するように構成されたシステムであって、1つまたは複数のプロセッサと通信しているカメラと、1つまたは複数のプロセッサのうちの少なくとも1つに動作可能に結合され、命令が記憶されている1つまたは複数のメモリとを備えるシステムが開示される。1つまたは複数のプロセッサのうちの少なくとも1つによって実行されると、命令は、システムに、移動空中ターゲットの複数の画像をキャプチャすることと、ターゲットの複数の画像間の微視的な時間的変動を増幅させ、ターゲットの画像の2次元ジオメトリの少なくとも1つの微視的な時間的検出変動のプロファイルを生成することとを行わせ、ここで、2次元ジオメトリの少なくとも1つの微視的な時間的検出変動は、移動ターゲットの2次元ジオメトリの垂直変動を含む。
【0008】
本技術の別の態様では、移動空中ターゲットを分類するように構成されたシステムであって、1つまたは複数のプロセッサと通信しているカメラと、1つまたは複数のプロセッサのうちの少なくとも1つに動作可能に結合され、命令が記憶されている1つまたは複数のメモリとを備えるシステムが開示される。命令が1つまたは複数のプロセッサのうちの少なくとも1つによって実行されると、命令は、システムに、移動空中ターゲットの複数の画像をキャプチャすることと、ターゲットの複数の画像間の微視的な時間的変動を増幅させ、ターゲットの画像の2次元ジオメトリの少なくとも1つの微視的な時間的検出変動のプロファイルを生成することとを行わせ、ここで、ターゲットの画像の2次元ジオメトリの少なくとも1つの微視的な時間的検出変動は、移動ターゲットの2次元ジオメトリの変化の頻度(frequency)の変動を含む。
【0009】
本技術の別の態様では、命令を記憶する1つまたは複数の非一時的コンピュータ可読媒体を備える1つまたは複数のコンピュータ可読媒体が開示され、ここで、命令は、1つまたは複数のコンピューティングデバイスによって実行されると、1つまたは複数のコンピューティングデバイスのうちの少なくとも1つに、空中ターゲットについて、空中風景の所定のエリアをスキャンすることと空中ターゲットの複数の画像をキャプチャすることとを行わせる。それはまた、1つまたは複数のコンピューティングデバイスに、400nm~700nmの周波数範囲における空中ターゲットの複数の画像間の微視的な時間的変動を増幅させることを行わせ、ここで、少なくとも1つの微視的な時間的検出変動は、空中ターゲットの2次元画像のジオメトリの変化を含む。空中ターゲットの画像のジオメトリの変化を検出した後に、1つまたは複数のコンピューティングデバイスは、700nm~1100nmの周波数範囲における空中ターゲットの強度値を検出する。
【図面の簡単な説明】
【0010】
本技術は、添付の図面と併せて解釈される以下の説明および特許請求の範囲からより完全に明らかになるであろう。これらの図面は単に本技術の例示的な態様を示すものであり、したがって、本技術の範囲を限定するものと見なされるべきではないことを理解されたい。本技術の構成要素は、本明細書において一般的に説明され、図面に示されているように、多種多様な異なる構成で配置および設計され得ることが容易に理解されよう。それにもかかわらず、本技術は、添付の図面を用いて、追加の特異性および詳細をもって記載および説明される。
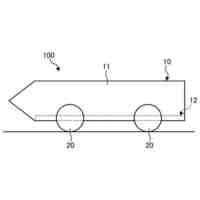
固定位置にいる観察者の視点から見た、動いている物体のジオメトリの相対論的変化の一例である。
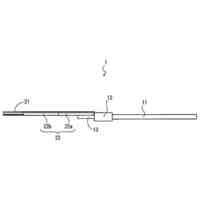
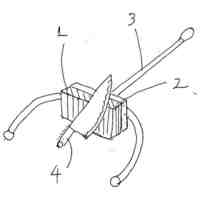
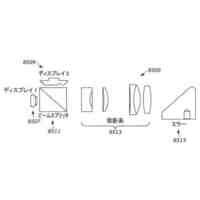
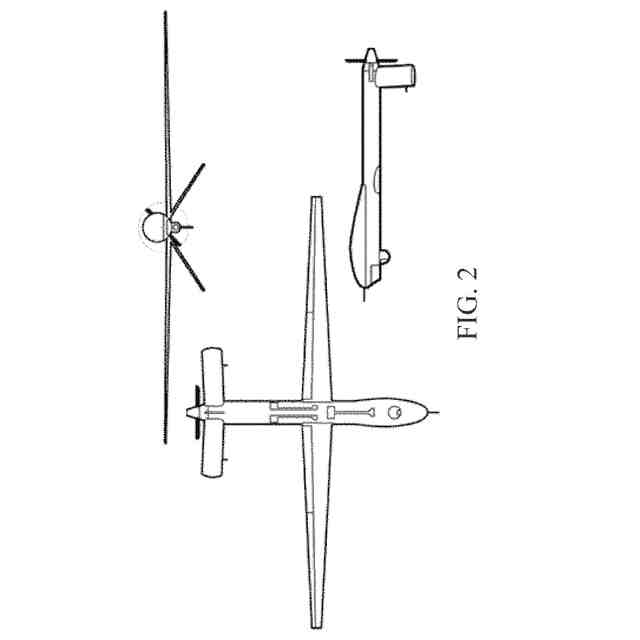
UAVの複数の異なる図である。
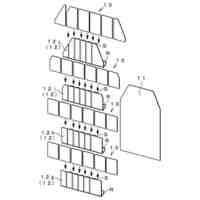
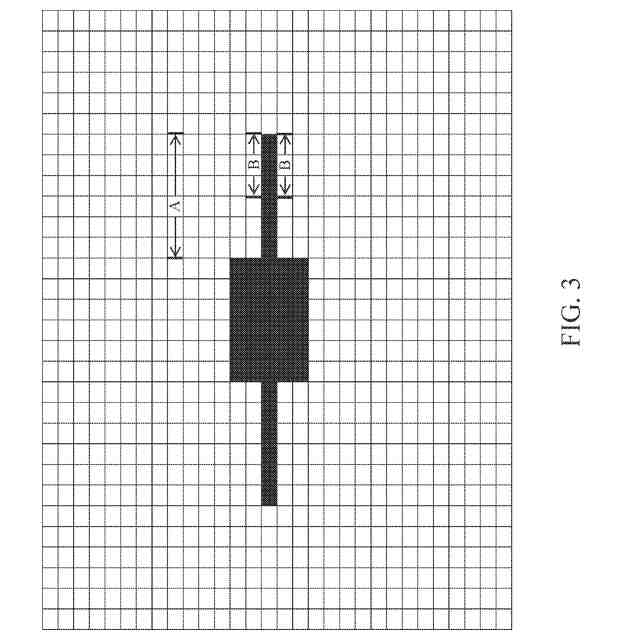
本技術の一態様による未知のターゲットビューの2-D断面ピクセルビューである。
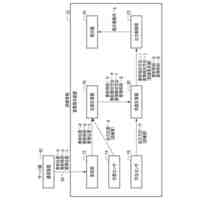
本技術の態様を示すフローチャートである。
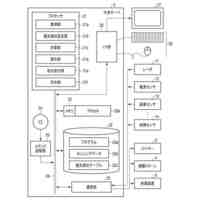
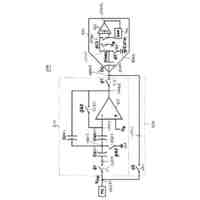
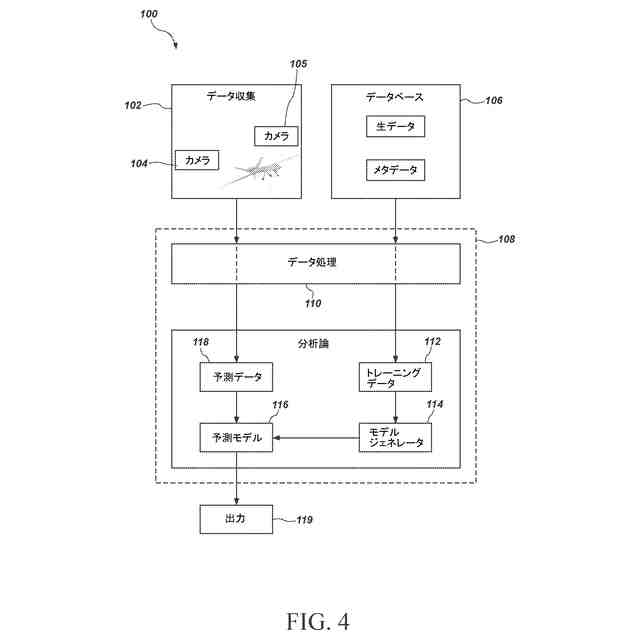
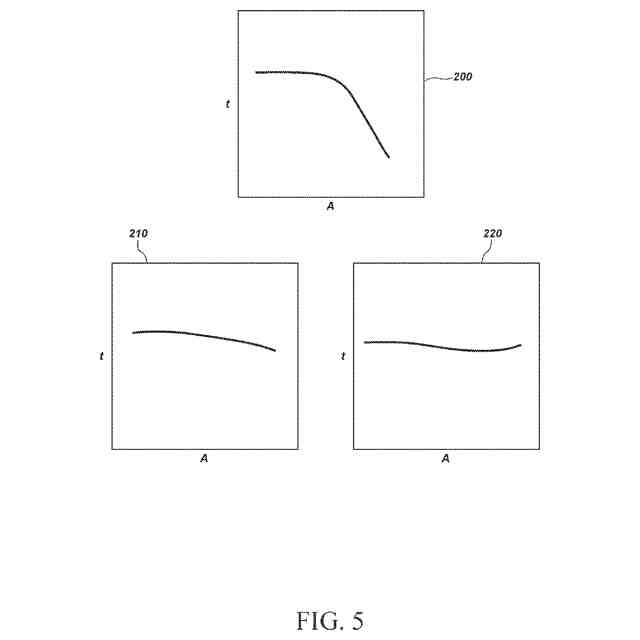
本技術の態様を示す複数の図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東レ株式会社
防刃材
3か月前
個人
低反動銃火器
2か月前
個人
超強力磁石付き刺股。
5か月前
株式会社東京マルイ
玩具銃
11日前
株式会社東京マルイ
玩具銃
6か月前
パテントフレア株式会社
遠赤外レーザー銃
5か月前
個人
弾倉、気体収容部材及び玩具銃
4か月前
アイ・コーポレーション株式会社
刺股
3か月前
三菱重工業株式会社
装甲車
4か月前
株式会社LIXIL
防犯フェンス
2か月前
株式会社カブール
防刃・防刺・防弾用具
14日前
個人
ライフル銃、ピストルおよびそれらの位置調整機構
11日前
合同会社IPマネジメント
RWSによるアクティブ防御システム
14日前
京北産業有限会社
射撃訓練システム
1か月前
株式会社国際電気
射撃訓練システム
3か月前
逵恩室内設計諮詢(上海)有限公司
光源ビームを調整可能なトイガン
7か月前
NECネットワーク・センサ株式会社
水中航走体射出装置および射出方法
2か月前
株式会社モダンビル管理
体動訓練システム、訓練方法及び訓練アプリケーション
5か月前
三菱重工業株式会社
照準投射システム及び照準投射方法
1か月前
株式会社エイテック
標的システム
6か月前
株式会社ナイト工芸
飛沫拡散防止機能付ブローライフル
3か月前
株式会社LIXIL
防犯フェンス
2か月前
東芝電波プロダクツ株式会社
現示器、現示システム、および現示方法
4か月前
東芝電波プロダクツ株式会社
着弾方位の音響現示装置、方法、およびプログラム
4か月前
株式会社東芝
無人航空機対処システム、中央装置、および、無人航空機対処方法
2か月前
三菱電機ディフェンス&スペーステクノロジーズ株式会社
射撃訓練装置、射撃訓練方法、及び射撃訓練プログラム
1か月前
サ-コス コーポレイション
非生物学的な可動の空中ターゲットの早期検出のためのシステムおよび方法
7か月前
シェルタード ウィングス インコーポレイテッド ドゥーイング ビジネス アズ ヴォルテクス オプティクス
観察光学機器のための表示システム
5か月前
シェルタード ウィングス インコーポレイテッド ドゥーイング ビジネス アズ ヴォルテクス オプティクス
ダイレクトアクティブ型レチクルターゲティングを備えた観察光学機器
3か月前
ブリルニクス シンガポール プライベート リミテッド
固体撮像装置、固体撮像装置の駆動方法、および電子機器
6か月前
プライムプラネットエナジー&ソリューションズ株式会社
アルミニウム部材、アルミニウム樹脂複合体およびアルミニウム樹脂複合体の製造方法
7か月前
個人
核変換システム
5か月前
パナソニックオートモーティブシステムズ株式会社
信号制御装置、ソナーシステム、及び車両
5か月前
三郷コンピュータホールディングス株式会社
リーダで読み取り可能な識別子が印刷されたコード
3か月前
公益財団法人鉄道総合技術研究所
PCまくらぎの健全度評価装置及びPCまくらぎの健全度評価方法
2か月前
他の特許を見る

 特許ウォッチ
特許ウォッチ