TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025040730
公報種別
公開特許公報(A)
公開日
2025-03-25
出願番号
2023147706
出願日
2023-09-12
発明の名称
無人航空機対処システム、中央装置、および、無人航空機対処方法
出願人
株式会社東芝
,
東芝インフラシステムズ株式会社
代理人
弁理士法人鈴榮特許綜合事務所
主分類
F41H
11/02 20060101AFI20250317BHJP(武器)
要約
【課題】複数の選択肢から状況に応じて的確な対処手段を提示すること。
【解決手段】実施形態によれば、無人航空機対処システムは、それぞれ無人航空機を対処可能な複数の対処手段と、ターゲットの無人航空機に関するセンシングデータを取得する複数のセンサと、中央装置とを具備する。中央装置は、推測部と、優先順位設定部と、計算部と、提示部とを備える。推測部は、取得されたセンシングデータに基づいてターゲットの目的を推測する。優先順位設定部は、推測された目的と我側の望む結果との関係に基づいて、対処手段の優先順位を設定する。計算部は、取得されたセンシングデータに基づいて、対処手段ごとに効果を発揮するまでの所要時間を計算する。提示部は、優先順位と所要時間とに基づいて、複数の対処手段の選択肢を推奨順に提示する。
【選択図】図3
特許請求の範囲
【請求項1】
それぞれ無人航空機を対処可能な複数の対処手段と、
ターゲットの無人航空機に関するセンシングデータを取得する複数のセンサと、
中央装置とを具備し、
前記中央装置は、
取得された前記センシングデータに基づいて前記ターゲットの目的を推測する推測部と、
前記推測された目的と我側の望む結果との関係に基づいて、前記対処手段の優先順位を設定する優先順位設定部と、
取得された前記センシングデータに基づいて、前記対処手段ごとに効果を発揮するまでの所要時間を計算する計算部と、
前記優先順位と前記所要時間とに基づいて、前記複数の対処手段の選択肢を推奨順に提示する提示部とを備える、無人航空機対処システム。
続きを表示(約 1,100 文字)
【請求項2】
前記中央装置は、表示装置をさらに具備し、
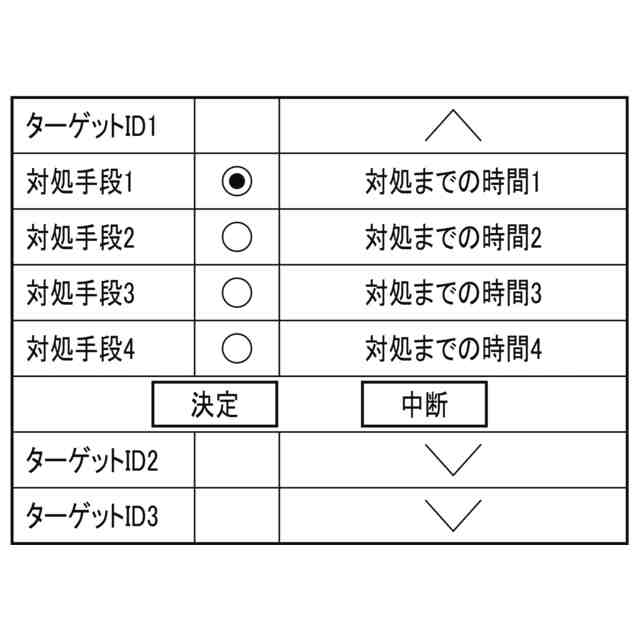
前記提示部は、前記推奨順で前記選択肢をリストアップして前記表示装置に表示する、請求項1に記載の無人航空機対処システム。
【請求項3】
前記中央装置は、ユーザによる対処手段の指定と前記ターゲットに対する対処の決定または中断の指示を受け付ける指示受付部をさらに具備する、請求項1または2に記載の無人航空機対処システム。
【請求項4】
前記中央装置は、前記対処が決定された場合に対処の実行を指示する指令メッセージを生成して前記指定された対処手段に送信する司令部をさらに備える、請求項3に記載の無人航空機対処システム。
【請求項5】
前記複数の対処手段は、
妨害電波を発射する妨害電波発生装置、
前記ターゲットを捕獲する捕獲ドローン、および、
前記ターゲットを物理的に破壊する射撃装置のうち少なくともいずれか2つを含む、請求項1に記載の無人航空機対処システム。
【請求項6】
それぞれ無人航空機を対処可能な複数の対処手段と、ターゲットの無人航空機に関するセンシングデータを取得する複数のセンサとに、ネットワークを介して接続可能な中央装置であって、
取得された前記センシングデータに基づいて前記ターゲットの目的を推測する推測部と、
前記推測された目的と我側の望む結果との関係に基づいて、前記対処手段の優先順位を設定する優先順位設定部と、
取得された前記センシングデータに基づいて、前記対処手段ごとに効果を発揮するまでの所要時間を計算する計算部と、
前記優先順位と前記所要時間とに基づいて、前記複数の対処手段の選択肢を推奨順に提示する提示部とを備える、中央装置。
【請求項7】
ネットワークを介して、それぞれ無人航空機を対処可能な複数の対処手段とターゲットの無人航空機に関するセンシングデータを取得する複数のセンサとに接続可能なコンピュータによる無人航空機対処方法であって、
前記コンピュータが、取得された前記センシングデータに基づいて前記ターゲットの目的を推測する過程と、
前記コンピュータが、前記推測された目的と我側の望む結果との関係に基づいて、前記対処手段の優先順位を設定する過程と、
前記コンピュータが、取得された前記センシングデータに基づいて、前記対処手段ごとに効果を発揮するまでの所要時間を計算する過程と、
前記コンピュータが、前記優先順位と前記所要時間とに基づいて、前記複数の対処手段の選択肢を推奨順に提示する過程とを備える、無人航空機対処方法。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、無人航空機対処システム、中央装置、および、無人航空機対処方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
無人航空機(unmanned aerial vehicle:UAV)は、無線操縦により、あるいは自律的に空中を移動することの可能なオブジェクトであり、いわゆるドローンもその範疇に入る。
【0003】
近年、ドローン技術は目覚ましく発展し、災害の状況把握やインフラの点検など、幅広い分野で利用されるようになってきている。その一方で、空港への侵入により滑走路が長時間に亘って閉鎖する事件、電力プラントへの侵入による業務妨害、あるいは要人を狙ったテロ行為など、悪意を伴った利用も問題になってきた。
【0004】
害をなすドローンに対処する技術(カウンタードローン技術)として、飛来するドローンに強力な電磁波を放射して妨害する方法、物理的に破壊する方法、投網方式で捕獲する方法などが知られている。
【先行技術文献】
【特許文献】
【0005】
特許第7101799号公報
特開2022-141240号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
既存の技術では、選択肢といえるほどの対処手段のバリエーションが無く、また、システムの運用者(ユーザ)に決断を促すために提示できる情報も限られていた。例えば撃ち落としたドローンに放射性物質が積載されていた場合、我側は却って被害をこうむることになる。この場合、当該ドローンを捕獲するか、何らかの手段で「追い返す」ことがより良い対処法であったといえる。このような、ドローンの到来目的やそのときの状況に応じた対処法をインテリジェントに提示することの可能な技術は知られていない。
【0007】
そこで、目的は、複数の選択肢から状況に応じて的確な対処手段を提示することのできる無人航空機対処システム、中央装置、および、無人航空機対処方法を提供することにある。
【課題を解決するための手段】
【0008】
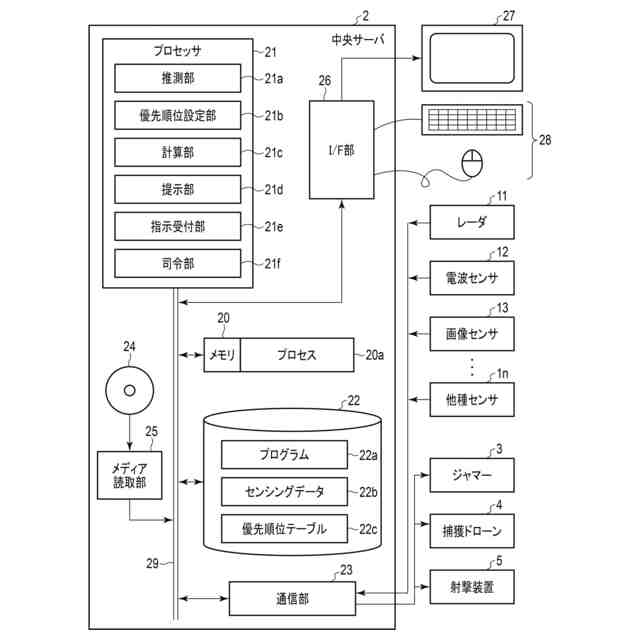
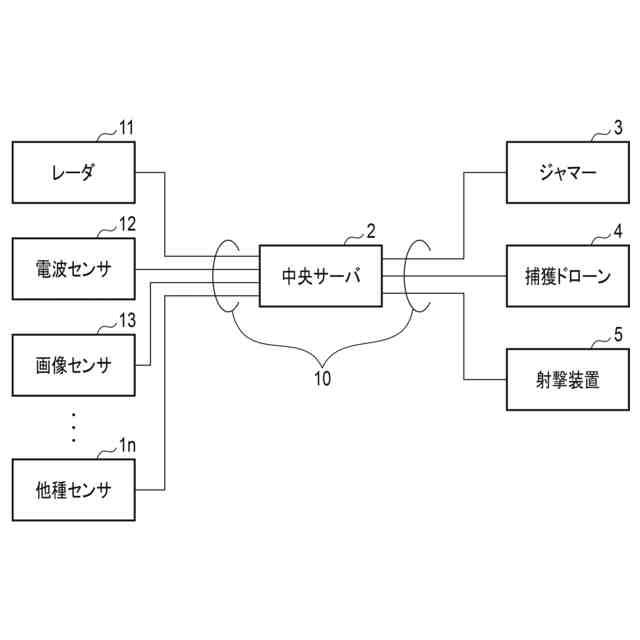
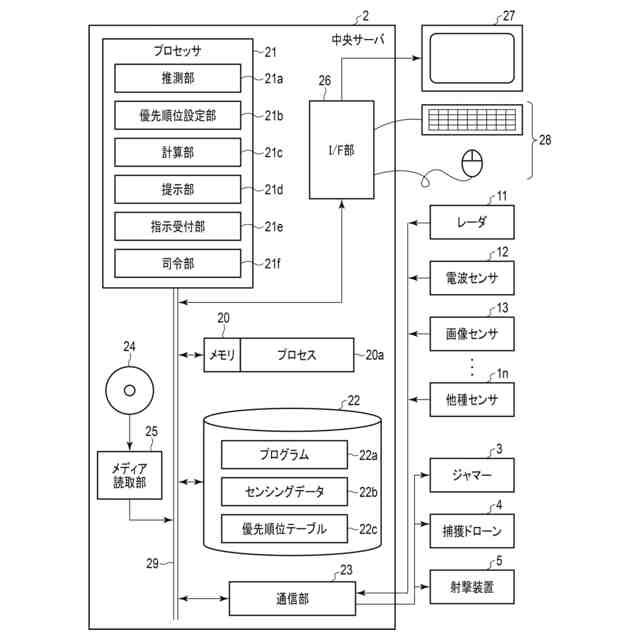
実施形態によれば、無人航空機対処システムは、それぞれ無人航空機を対処可能な複数の対処手段と、ターゲットの無人航空機に関するセンシングデータを取得する複数のセンサと、中央装置とを具備する。中央装置は、推測部と、優先順位設定部と、計算部と、提示部とを備える。推測部は、取得されたセンシングデータに基づいてターゲットの目的を推測する。優先順位設定部は、推測された目的と我側の望む結果との関係に基づいて、対処手段の優先順位を設定する。計算部は、取得されたセンシングデータに基づいて、対処手段ごとに効果を発揮するまでの所要時間を計算する。提示部は、優先順位と所要時間とに基づいて、複数の対処手段の選択肢を推奨順に提示する。
【図面の簡単な説明】
【0009】
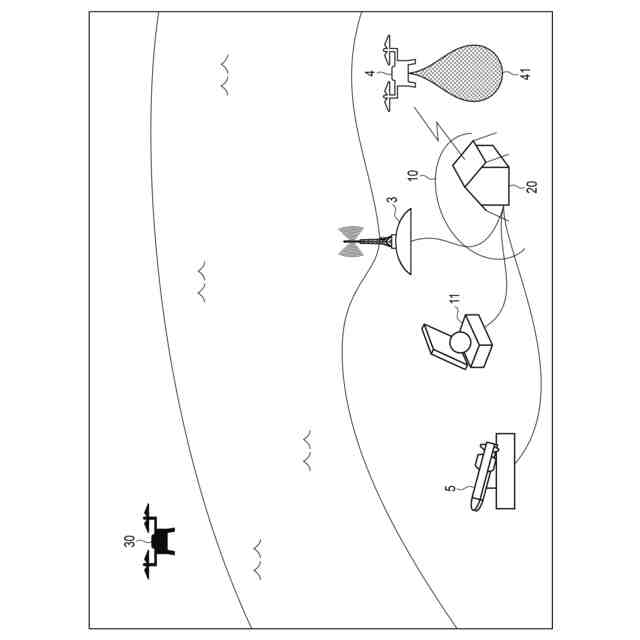
図1は、実施形態に係わる無人航空機対処システムの適用例を示す図である。
図2は、実施形態に係わる無人航空機対処システムの一例を示すブロック図である。
図3は、図2に示される中央サーバ2の一例を示す機能ブロック図である。
図4は、表示装置27に表示される監視画面(ウインドウ)のフォーマットの一例を示す図である。
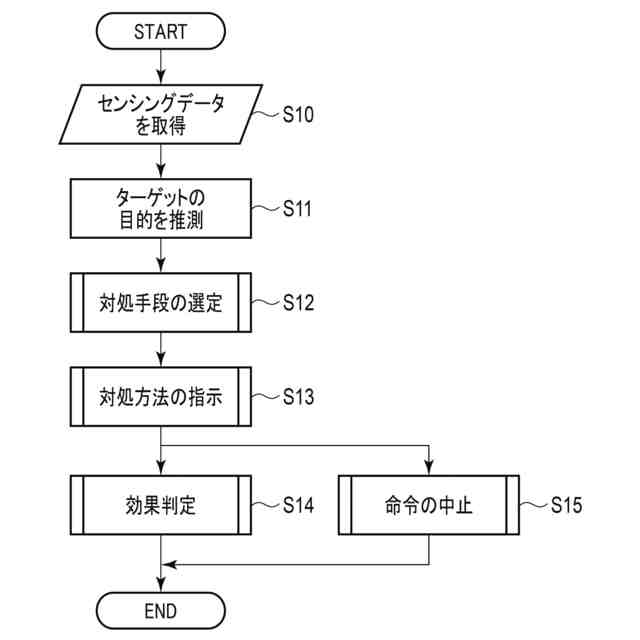
図5は、図2に示される中央サーバ2の処理手順の一例を示すフローチャートである。
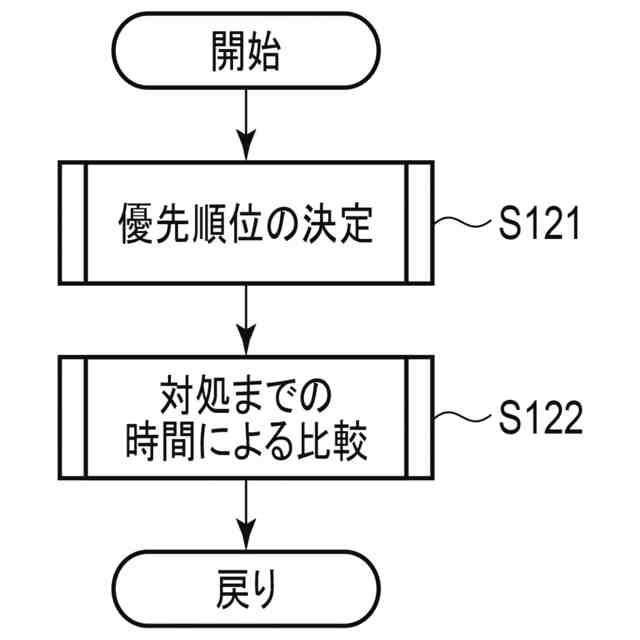
図6は、対処手段の選定に係わる処理手順の一例を示すフローチャートである。
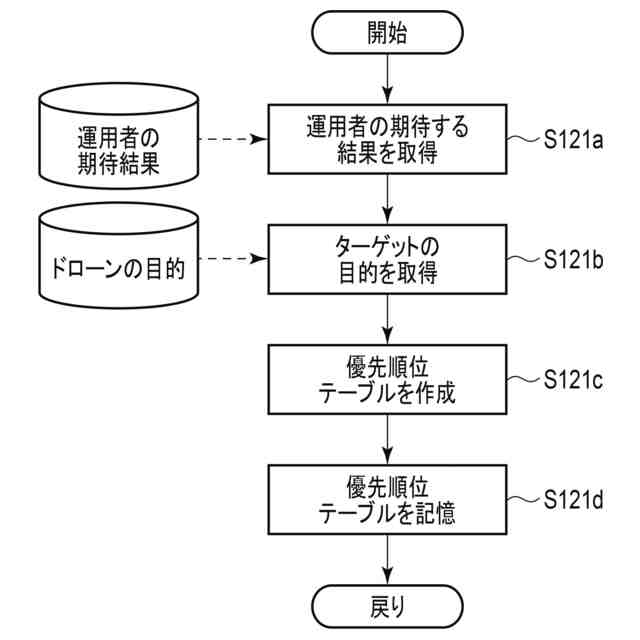
図7は、優先順位の決定に係わる処理手順の一例を示すフローチャートである。
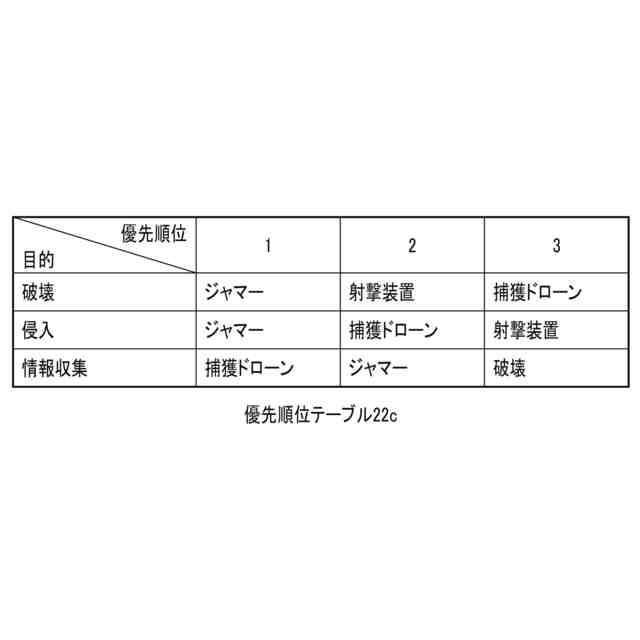
図8は、優先順位テーブル22cの一例を示す図である。
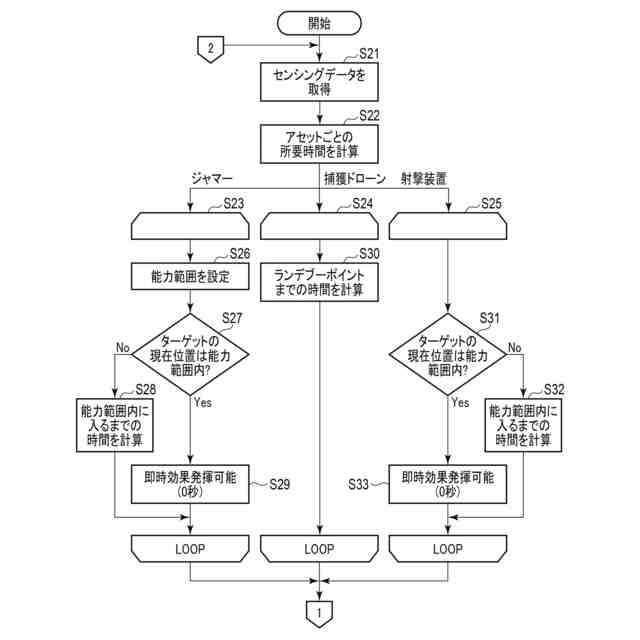
図9は、対処までの時間による比較に係わる処理手順の一例を示すフローチャートである。
図10は、対処までの時間による比較に係わる処理手順の一例を示すフローチャートである。
図11は、対処方法の指示に係わる処理手順の一例を示すフローチャートである。
図12は、監視画面に表示される内容の一例を示す図である。
図13は、命令の中止に係わる処理手順の一例を示すフローチャートである。
図14は、効果判定に係わる処理手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
図1は、実施形態に係わる無人航空機対処システムの適用例を示す図である。実施形態では無人航空機としていわゆるドローンを想定し、監視対象エリアに到来するターゲットドローンへの対処について説明する。有人航空機や船舶などのターゲットに対しても基本的な構成、作用、効果は同様である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東芝
モータ
1か月前
株式会社東芝
センサ
1か月前
株式会社東芝
端子台
23日前
株式会社東芝
センサ
1か月前
株式会社東芝
電子装置
1か月前
株式会社東芝
電子装置
1か月前
株式会社東芝
吸音装置
1か月前
株式会社東芝
除去装置
16日前
株式会社東芝
金型構造
1か月前
株式会社東芝
電子回路
1か月前
株式会社東芝
高周波回路
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
粒子加速器
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
2日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ