TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024149176
公報種別
公開特許公報(A)
公開日
2024-10-18
出願番号
2023062890
出願日
2023-04-07
発明の名称
自律移動体制御システム、自律移動体制御方法、及びプログラム
出願人
清水建設株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20241010BHJP(制御;調整)
要約
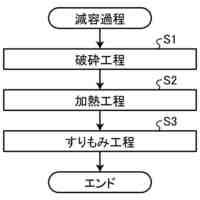
【課題】エレベータが管制運転に移行した状況に対応して自律移動体が適切に移動できるようにする。
【解決手段】自律移動体が移動対象とする階に対応するマップを、当該自律移動体が移動に際して使用対象マップとして使用するように自律移動体に指示する移動制御部として移動開始位置を含む出発階に対応する第1マップと平常運転での目的位置を含む行き先階に対応する第2マップとを使用対象マップとするように自律移動体に指示し、第1マップと第2マップを使用対象マップとして移動中の自律移動体がエレベータに搭乗しているときに、当該エレベータが平常運転から管制運転に移行した場合には、行き先階に対応するマップとして、第2マップに代えて、管制運転のもとで指定されるエレベータの停止階に対応する第3マップを使用対象マップとするように自律移動体に指示するように自律移動体制御システムを構成する。
【選択図】図7
特許請求の範囲
【請求項1】
複数の階間をエレベータで移動可能な建物内部を移動する自律移動体を制御する自律移動体制御システムであって、
前記自律移動体が移動対象とする階に対応するマップを、当該自律移動体が移動に際して使用対象マップとして使用するように自律移動体に指示する移動制御部を備え、
前記移動制御部は、移動開始位置を含む出発階に対応する第1マップと平常運転での目的位置を含む行き先階に対応する第2マップとを使用対象マップとするように前記自律移動体に指示し、
前記第1マップと前記第2マップを使用対象マップとして移動中の前記自律移動体がエレベータに搭乗しているときに、当該エレベータが平常運転から管制運転に移行した場合には、行き先階に対応するマップとして、前記第2マップに代えて、前記管制運転のもとで指定されるエレベータの停止階に対応する第3マップを使用対象マップとするように前記自律移動体に指示する
自律移動体制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記移動制御部は、管制運転の場合に自律移動体に対応して前記停止階にて指定される管制運転対応の停止位置を前記第3マップにおける目的位置として指定する
請求項1に記載の自律移動体制御システム。
【請求項3】
前記移動制御部は、エレベータの運行を制御するエレベータ制御システムから出力された管制運転に関する通知の内容に基づいて前記停止階を特定し、特定した停止階に対応する前記第3マップの使用を前記自律移動体に指示する
請求項1または2に記載の自律移動体制御システム。
【請求項4】
複数の階間をエレベータで移動可能な建物内部を移動する自律移動体を制御する自律移動体制御システムにおける自律移動体制御方法であって、
移動制御部が、前記自律移動体が移動対象とする階に対応するマップを、当該自律移動体が移動に際して使用対象マップとして使用するように自律移動体に指示する移動制御ステップを備え、
前記移動制御ステップは、移動開始位置を含む出発階に対応する第1マップと平常運転での目的位置を含む行き先階に対応する第2マップとを使用対象マップとするように前記自律移動体に指示し、
前記第1マップと前記第2マップを使用対象マップとして移動中の前記自律移動体がエレベータに搭乗しているときに、当該エレベータが平常運転から管制運転に移行した場合には、行き先階に対応するマップとして、前記第2マップに代えて、前記管制運転のもとで指定されるエレベータの停止階に対応する第3マップを使用対象マップとするように前記自律移動体に指示する
自律移動体制御方法。
【請求項5】
複数の階間をエレベータで移動可能な建物内部を移動する自律移動体を制御する自律移動体制御システムにおけるコンピュータを、
前記自律移動体が移動対象とする階に対応するマップを、当該自律移動体が移動に際して使用対象マップとして使用するように自律移動体に指示する移動制御部として機能させるためプログラムであって、
前記移動制御部は、移動開始位置を含む出発階に対応する第1マップと平常運転での目的位置を含む行き先階に対応する第2マップとを使用対象マップとするように前記自律移動体に指示し、
前記第1マップと前記第2マップを使用対象マップとして移動中の前記自律移動体がエレベータに搭乗しているときに、当該エレベータが平常運転から管制運転に移行した場合には、行き先階に対応するマップとして、前記第2マップに代えて、前記管制運転のもとで指定されるエレベータの停止階に対応する第3マップを使用対象マップとするように前記自律移動体に指示する
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動体制御システム、自律移動体制御方法、及びプログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
消火ロボットをエレベータに乗車させて火災の発生した階(フロア)にまで移動させる技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6614600号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば火災や地震等の災害の発生した場合には、エレベータが平常運転から管制運転に移行する。自律的に移動する自律移動体がエレベータを利用して建物における階間を移動するようにされている場合には、管制運転への移行に応じて自律移動体が適切に移動できるようにすることが求められる。
【0005】
本発明は、上記に記載した課題を考慮して、エレベータが管制運転に移行した状況に対応して自律移動体が適切に移動できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決する本発明の一態様は、複数の階間をエレベータで移動可能な建物内部を移動する自律移動体を制御する自律移動体制御システムであって、前記自律移動体が移動対象とする階に対応するマップを、当該自律移動体が移動に際して使用対象マップとして使用するように自律移動体に指示する移動制御部を備え、前記移動制御部は、移動開始位置を含む出発階に対応する第1マップと平常運転での目的位置を含む行き先階に対応する第2マップとを使用対象マップとするように前記自律移動体に指示し、前記第1マップと前記第2マップを使用対象マップとして移動中の前記自律移動体がエレベータに搭乗しているときに、当該エレベータが平常運転から管制運転に移行した場合には、行き先階に対応するマップとして、前記第2マップに代えて、前記管制運転のもとで指定されるエレベータの停止階に対応する第3マップを使用対象マップとするように前記自律移動体に指示する自律移動体制御システムである。
【0007】
本発明の一態様は、複数の階間をエレベータで移動可能な建物内部を移動する自律移動体を制御する自律移動体制御システムにおける自律移動体制御方法であって、移動制御部が、前記自律移動体が移動対象とする階に対応するマップを、当該自律移動体が移動に際して使用対象マップとして使用するように自律移動体に指示する移動制御ステップを備え、前記移動制御ステップは、移動開始位置を含む出発階に対応する第1マップと平常運転での目的位置を含む行き先階に対応する第2マップとを使用対象マップとするように前記自律移動体に指示し、前記第1マップと前記第2マップを使用対象マップとして移動中の前記自律移動体がエレベータに搭乗しているときに、当該エレベータが平常運転から管制運転に移行した場合には、行き先階に対応するマップとして、前記第2マップに代えて、前記管制運転のもとで指定されるエレベータの停止階に対応する第3マップを使用対象マップとするように前記自律移動体に指示する自律移動体制御方法である。
【0008】
本発明の一態様は、複数の階間をエレベータで移動可能な建物内部を移動する自律移動体を制御する自律移動体制御システムにおけるコンピュータを、前記自律移動体が移動対象とする階に対応するマップを、当該自律移動体が移動に際して使用対象マップとして使用するように自律移動体に指示する移動制御部として機能させるためプログラムであって、前記移動制御部は、移動開始位置を含む出発階に対応する第1マップと平常運転での目的位置を含む行き先階に対応する第2マップとを使用対象マップとするように前記自律移動体に指示し、前記第1マップと前記第2マップを使用対象マップとして移動中の前記自律移動体がエレベータに搭乗しているときに、当該エレベータが平常運転から管制運転に移行した場合には、行き先階に対応するマップとして、前記第2マップに代えて、前記管制運転のもとで指定されるエレベータの停止階に対応する第3マップを使用対象マップとするように前記自律移動体に指示するプログラムである。
【発明の効果】
【0009】
本発明によれば、エレベータが管制運転に移行した状況に対応して自律移動体が適切に移動できるようになるとの効果が得られる。
【図面の簡単な説明】
【0010】
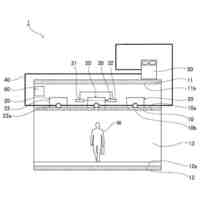
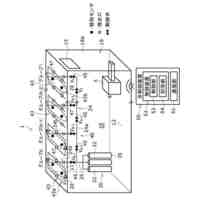
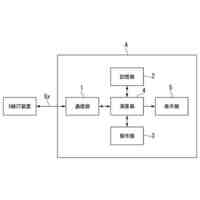
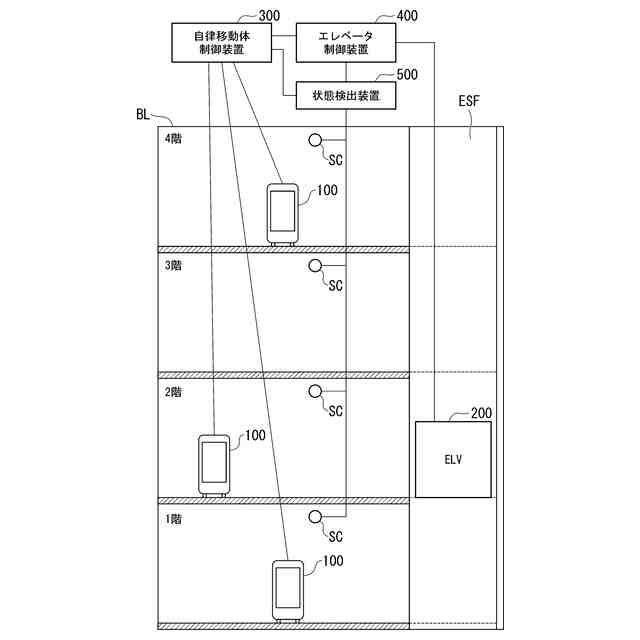
本実施形態における自律移動体制御システムの全体的な構成例を示す図である。
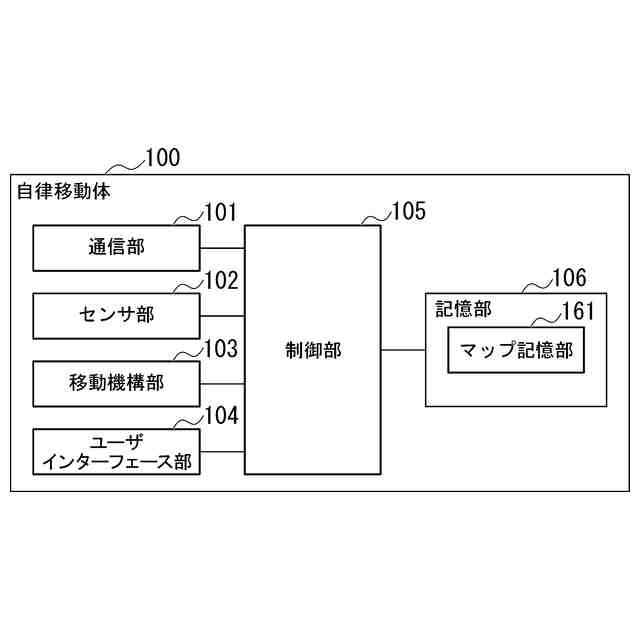
本実施形態における自律移動体の機能構成例を示す図である。
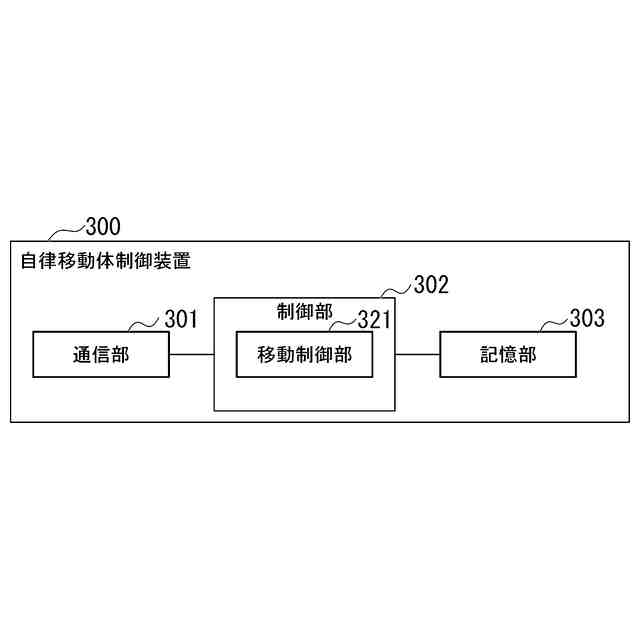
本実施形態における自律移動体制御装置の機能構成例を示す図である。
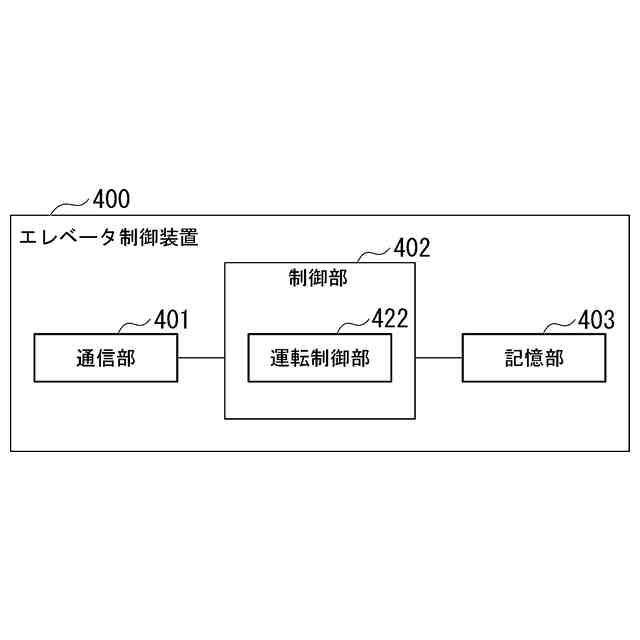
本実施形態におけるエレベータ制御装置の機能構成例を示す図である。
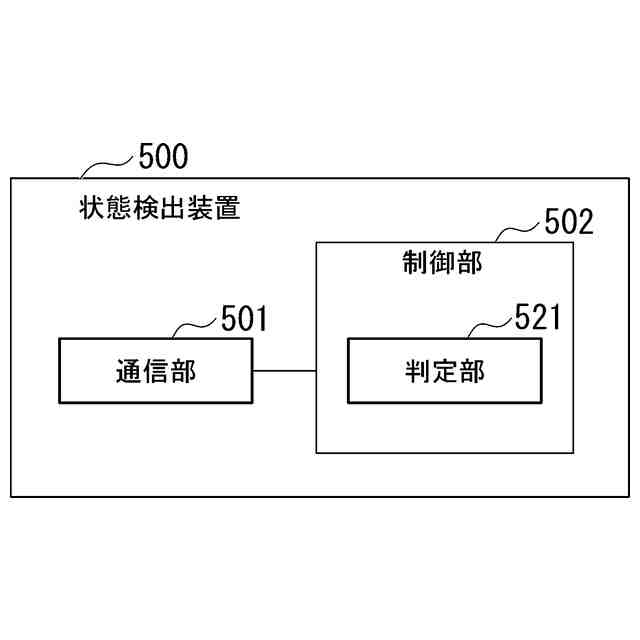
本実施形態における状態検出装置の機能構成例を示す図である。
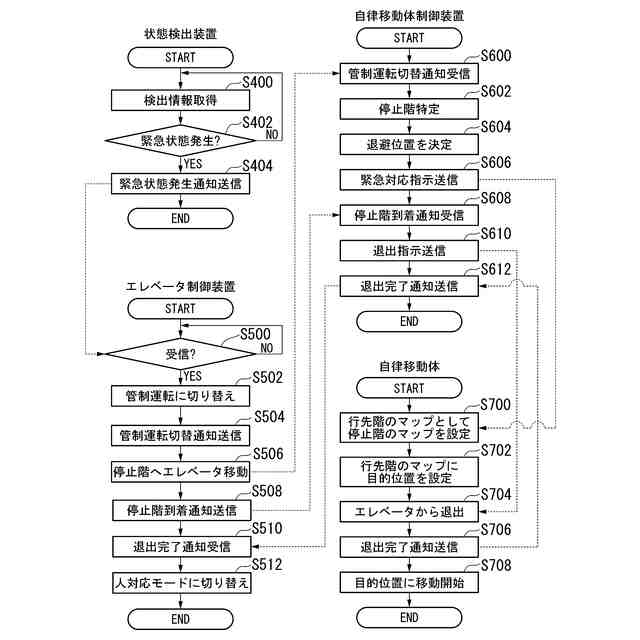
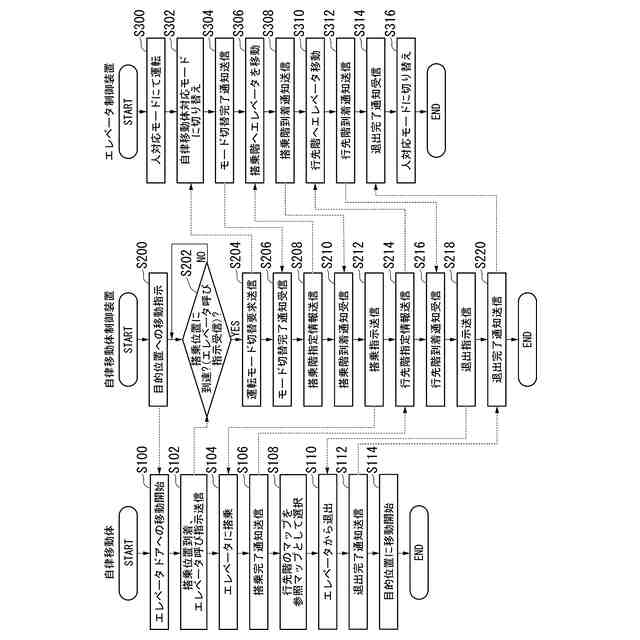
本実施形態における自律移動体、自律移動体制御装置、およびエレベータ制御装置が、平常運転のもとで自律移動体を階間で移動させるにあたり実行する処理手順例を示すフローチャートである。
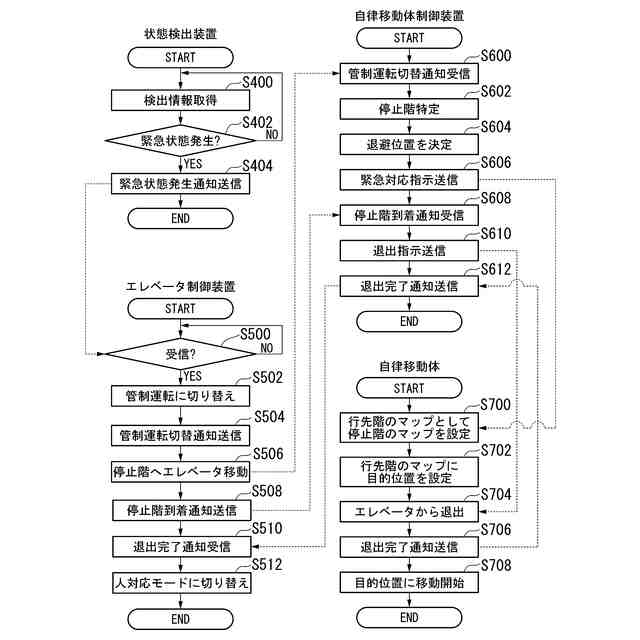
本実施形態におけるエレベータ制御装置、自律移動体制御装置、自律移動体が管制運転に対応して実行する処理手順例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
清水建設株式会社
免震構造
1か月前
清水建設株式会社
床センサ
17日前
清水建設株式会社
滑り支承
17日前
清水建設株式会社
滑り支承
11日前
清水建設株式会社
杭圧入機
26日前
清水建設株式会社
免震構造
1か月前
清水建設株式会社
木製組立家具
1か月前
清水建設株式会社
空調システム
17日前
清水建設株式会社
構造物の構築方法
1か月前
清水建設株式会社
土壌汚染評価方法
27日前
清水建設株式会社
仮設部材の撤去方法
1か月前
清水建設株式会社
電動ファン付きウェア
1か月前
清水建設株式会社
可燃性ガス希釈システム
4日前
清水建設株式会社
免震構造用の硬化型装置
1か月前
清水建設株式会社
切断装置および切断方法
19日前
清水建設株式会社
切断装置および切断方法
11日前
清水建設株式会社
倉庫内の作業環境改善装置
27日前
清水建設株式会社
コンクリート床版の切断方法
11日前
清水建設株式会社
汚染コンクリートの減容方法
4日前
清水建設株式会社
仮設エレベータの盛替え方法
17日前
清水建設株式会社
コンクリート床版の切断方法
1か月前
清水建設株式会社
プレキャスト床版の施工方法
4日前
清水建設株式会社
骨材抽出装置及び骨材抽出方法
17日前
清水建設株式会社
孔位置合わせ処理装置および方法
1か月前
清水建設株式会社
着岩位置予測処理装置および方法
1か月前
清水建設株式会社
隠れ位置推定処理装置および方法
1か月前
清水建設株式会社
柱梁接合構造および柱梁接合方法
3日前
清水建設株式会社
医療従事者の被曝量評価プログラム
3日前
清水建設株式会社
連結治具および構造建築物の構築方法
1か月前
清水建設株式会社
運行管理システム、及び運行管理方法
1か月前
清水建設株式会社
練混ぜ量算出装置及び練混ぜ量算出方法
1か月前
清水建設株式会社
移動時間推定システム及び移動時間推定方法
26日前
清水建設株式会社
コンクリート構造物の施工方法及び施工装置
1か月前
清水建設株式会社
工事用エレベータ及びカウンターウエイト装置
1か月前
清水建設株式会社
多孔質材料の洗浄装置及び多孔質材料の洗浄方法
27日前
清水建設株式会社
自律移動体装置、経路計算方法、及びプログラム
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ