TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024143561
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023056302
出願日
2023-03-30
発明の名称
孔位置合わせ処理装置および方法
出願人
清水建設株式会社
,
古河機械金属株式会社
,
古河ロックドリル株式会社
代理人
個人
主分類
E21B
44/00 20060101AFI20241003BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】ブームの先端をトンネル壁面の孔の位置に所定の向きで高精度に位置させる。
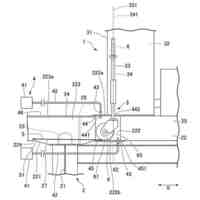
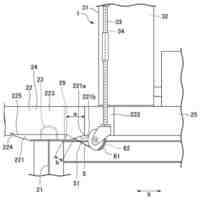
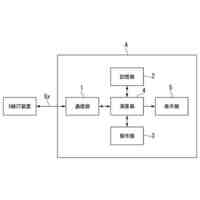
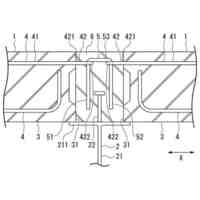
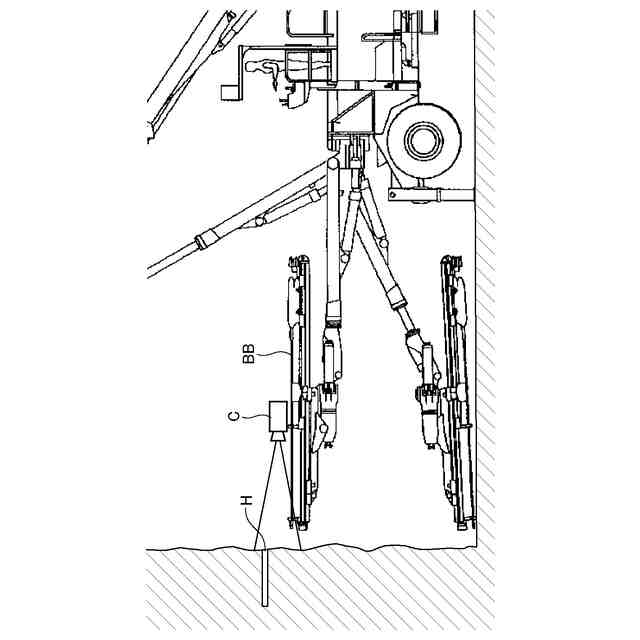
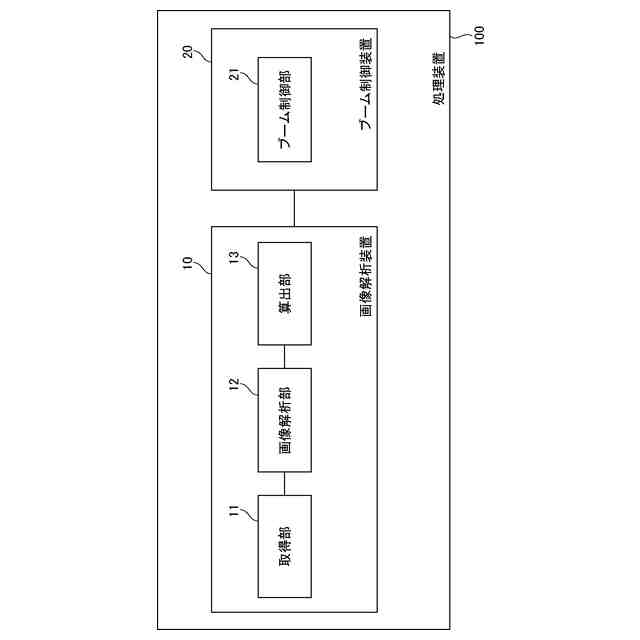
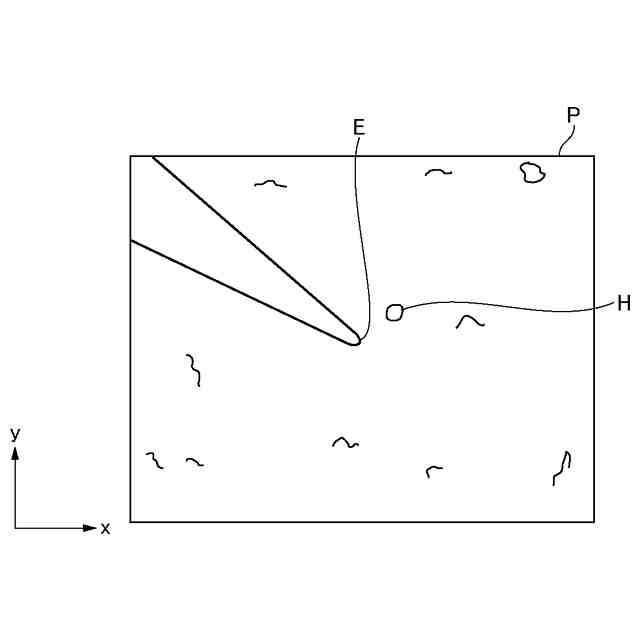
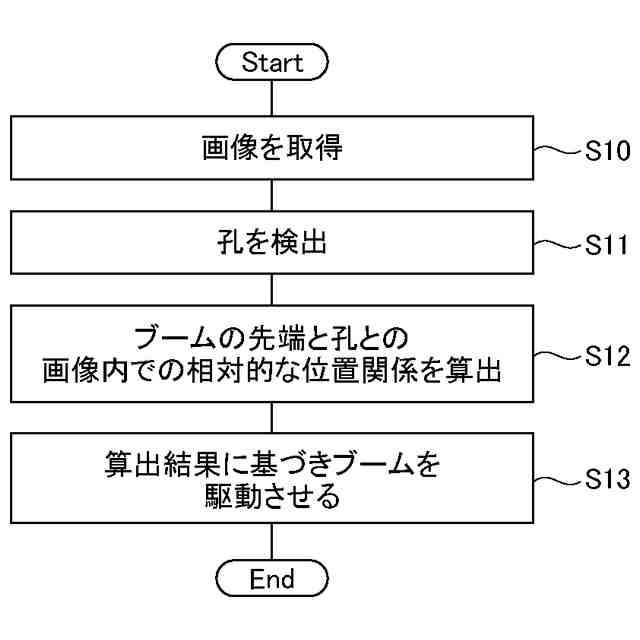
【解決手段】本発明は、ブームの先端が写るように撮影された画像を取得する取得部11と、画像の中から孔を検出する画像解析部12と、ブームの先端と孔との画像内での相対的な位置関係を算出する算出部13と、ブームの先端の位置及び方向を検出する手段を備え、孔を形成した際に登録された孔の位置情報に基づき、ブームを駆動させる第1のモードと、画像内での相対的な位置関係の算出結果に基づきブームを駆動させる第2のモードと、を有し、さらに、孔を形成した際に登録された孔の延伸方向を示すデータに基づき、ブームの先端の方向を所定の状態とするブーム制御部21と、を有する処理装置100を提供する。
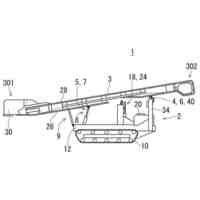
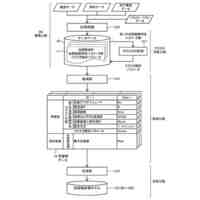
【選択図】図4
特許請求の範囲
【請求項1】
ブームの先端が写るように撮影された画像を取得する取得部と、
前記画像の中からトンネルの壁面に形成された孔を検出する画像解析部と、
前記ブームの先端と前記孔との前記画像内での相対的な位置関係を算出する算出部と、
前記ブームの先端の位置及び方向を検出する手段を備え、前記孔を形成した際に登録された前記孔の位置情報に基づき、前記ブームを駆動させる第1のモードと、前記画像内での前記相対的な位置関係の算出結果に基づき前記ブームを駆動させる第2のモードと、を有し、さらに、前記孔を形成した際に登録された前記孔の延伸方向を示すデータに基づき、前記ブームの先端の方向を所定の状態とするブーム制御部と、
を有する処理装置。
続きを表示(約 1,900 文字)
【請求項2】
前記ブーム制御部は、
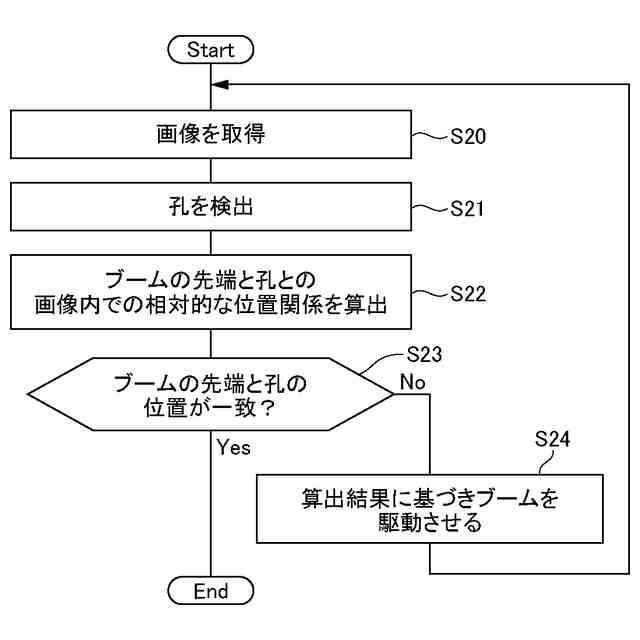
前記画像の中から前記孔が検出されていない間は前記第1のモードを実行し、前記画像の中から前記孔が検出されると、実行するモードを、前記第1のモードから前記第2のモードに切り替える請求項1に記載の処理装置。
【請求項3】
前記相対的な位置関係は、前記ブームの先端から前記孔に向かう方向を含み、
前記ブーム制御部は、前記画像内での前記相対的な位置関係の算出結果に基づき、前記ブームの先端を前記孔に近づく方向に移動させる請求項1に記載の処理装置。
【請求項4】
前記ブームに取り付けられたカメラが前記画像を撮影し、
前記ブーム制御部は、
前記ブームの姿勢に基づき前記カメラの姿勢を特定し、
前記カメラの姿勢に基づき、前記画像内での前記方向を実空間上での方向に変換し、
前記ブームの先端を、前記変換で得られた前記実空間上での方向に移動させる請求項3に記載の処理装置。
【請求項5】
前記ブーム制御部が備える手段で検出した前記ブームの先端の位置は、誤差を含む請求項1に記載の処理装置。
【請求項6】
前記取得部は、時系列な前記画像を取得し、
前記画像解析部は、前記画像の中から前記孔を検出するとともに、トンネルの側壁の特徴点を抽出し、
前記算出部は、処理対象の画像よりも時系列順が前の前記画像に基づき前記特徴点と前記孔との前記画像内での相対的な位置関係を算出するとともに、前記処理対象の画像内での前記特徴点の位置と、前記特徴点と前記孔との前記画像内での相対的な位置関係とに基づき、前記処理対象の画像内での前記孔の位置を推定する請求項1に記載の処理装置。
【請求項7】
前記算出部は、
前記処理対象の画像の中から前記孔が検出された場合、検出された前記孔の前記処理対象の画像内での位置に基づき、前記ブームの先端と前記孔との前記処理対象の画像内での相対的な位置関係を算出し、
前記処理対象の画像の中から前記孔が検出されなかった場合、推定された前記処理対象の画像内での前記孔の位置に基づき、前記ブームの先端と前記孔との前記処理対象の画像内での相対的な位置関係を算出する請求項6に記載の処理装置。
【請求項8】
前記算出部は、
前記処理対象の画像の中から前記孔が検出された場合、前記処理対象の画像内での前記孔の位置を推定する処理を実行せず、
前記処理対象の画像の中から前記孔が検出されなかった場合、前記処理対象の画像内での前記孔の位置を推定する処理を実行する請求項6に記載の処理装置。
【請求項9】
前記取得部は、互いに異なる方向から前記ブームの先端及び前記ブームの先端を当接させる当接対象が写るように同じタイミングで撮影された第1の画像及び第2の画像を取得し、
前記第1の画像の中で設定された直線であって、前記ブームに重なりかつ前記ブームの延伸方向に伸びる第1の直線と、前記当接対象との前記第1の画像の中での相対的な位置関係を示す第1の位置関係情報を生成する第1の生成部と、
前記第2の画像の中で設定された直線であって、前記ブームに重なりかつ前記ブームの延伸方向に伸びる第2の直線と、前記当接対象との前記第2の画像の中での相対的な位置関係を示す第2の位置関係情報を生成する第2の生成部と、
前記第1の画像の中で、前記当接対象との相対的な位置関係が前記第2の位置関係情報で示される位置関係を満たす第3の直線を設定する設定部と、
前記第1の画像の中で設定された前記第1の直線と前記第3の直線との交点の位置情報を、前記ブームの先端の当接予測地点として算出する予測部と、
を有し、
前記算出部は、前記ブームの先端と前記当接予測地点との前記画像内での相対的な位置関係を算出し、
ブーム制御部は、前記ブームの先端と前記当接予測地点との前記画像内での相対的な位置関係に基づき前記ブームを駆動させる請求項1に記載の処理装置。
【請求項10】
前記第1の生成部は、前記第1の直線と、前記第1の画像の中の前記当接対象から抽出された特徴点との相対的な位置関係を示す前記第1の位置関係情報を生成し、
前記第2の生成部は、前記第2の直線と、前記第2の画像の中の前記当接対象から抽出された特徴点との相対的な位置関係を示す前記第2の位置関係情報を生成する請求項9に記載の処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、処理装置及び処理方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
本発明に関連する技術が、特許文献1乃至4に開示されている。
【0003】
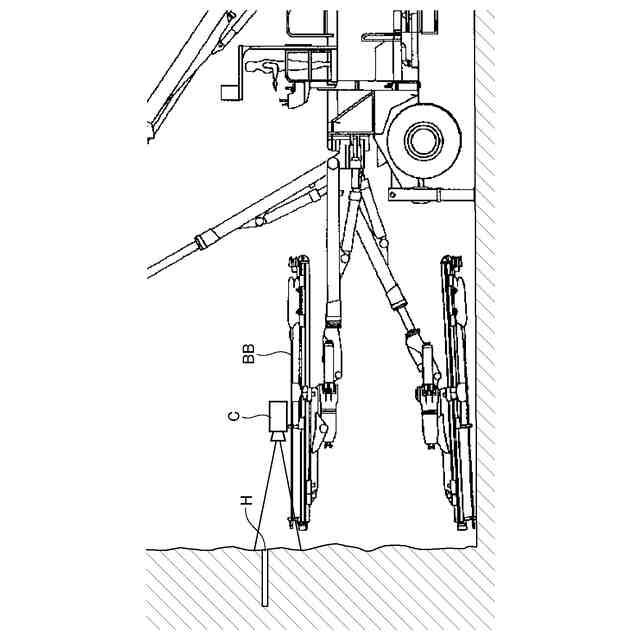
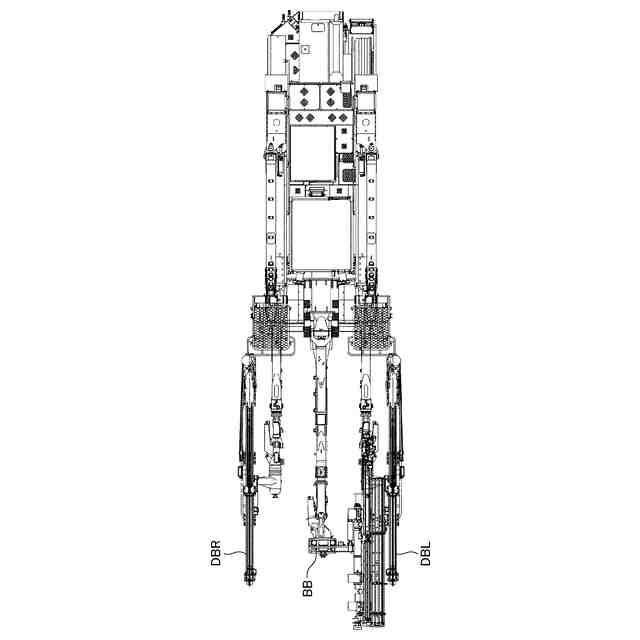
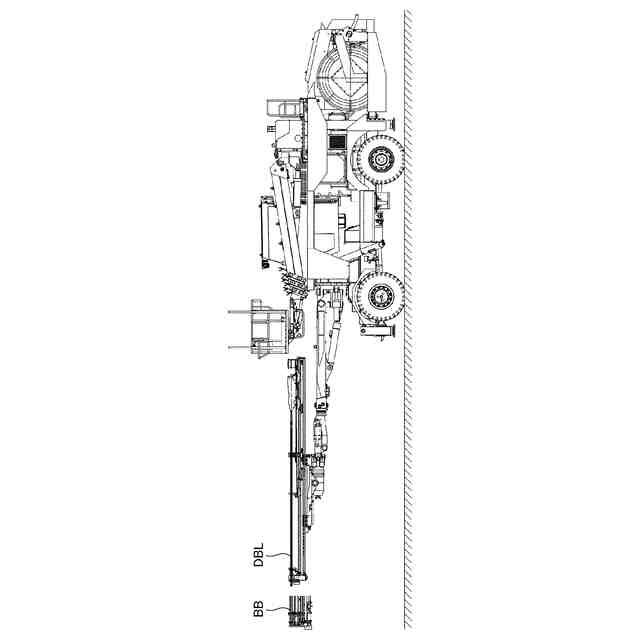
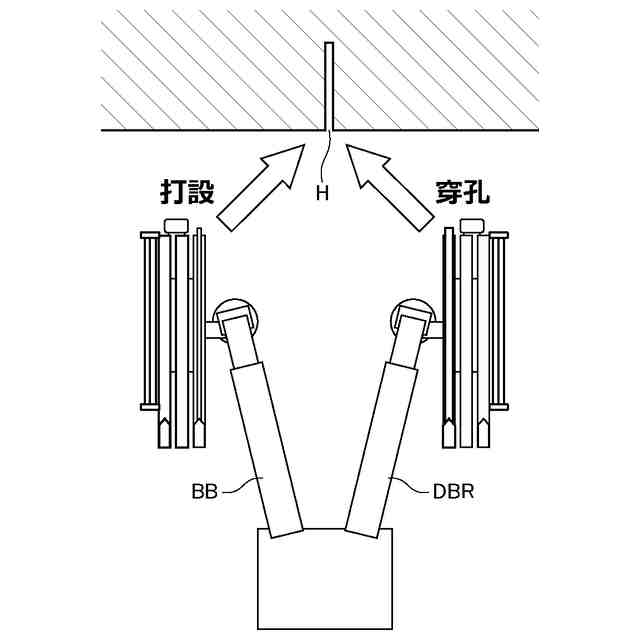
特許文献1には、台車と、当該台車に搭載される複数のブームとを備えるロックボルト打設車両が開示されている。当該ロックボルト打設車両は、穿孔用ブームと打設用ブームを別々に備える。そして、当該ロックボルト打設車両を利用した作業では、穿孔用ブームで孔を穿孔した後、打設用ブームをその孔の位置に移動させ、その孔にロックボルトを打設する。
【0004】
特許文献2及び3には、ブームの先端を目的位置に移動させるためのブーム制御方法が開示されている。
【0005】
特許文献4には、画像解析の結果に基づきブームを駆動させる技術が開示されている。当該技術では、画像内で荷物を検出し、画像上の荷物の位置に基づき、ブームの先端が荷物の重力方向真上に来る方向にブームを移動させる。
【先行技術文献】
【特許文献】
【0006】
特開2021-195819号公報
特開2017-78684号公報
特開2017-77617号公報
特開2011-207571号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ブームを用いた作業において、ブームの先端をトンネル壁面の孔の位置に所定の向きで高精度に位置させることが要求される場合がある。一例として、事前に穿孔した孔にロックボルトを打設する作業が挙げられる。当該作業では、例えば径50mm程度の孔に径25mm程度のボルトを挿入する。特許文献1に開示の技術のように、穿孔用ブームと打設用ブームを別々に備えた場合、ブームを駆動して(ブームの姿勢を変化させて)このような高精度の位置合わせを行う必要がある。特許文献1は、当該課題及びその解決手段を開示していない。また、特許文献2乃至4は、ブームの先端を目的位置に移動させるためのブーム制御方法を開示しているものの、上述のようなレベルでの高精度な位置合わせを実現する手法は開示していない。
【0008】
ブームの先端の位置合わせを行う処理の一例として、ブームが備える各種関節等の状態を検出するセンサの利用が挙げられる。具体的には、当該センサの値に基づきブームの姿勢及びブームの先端の位置を特定する。そして、センサの値に基づき特定したブームの先端の位置と任意の手段で特定した孔の位置とに基づき、ブームの先端の位置合わせを行う。しかし、当該手段の場合、「ブームの姿勢変化によるブームの撓み」、「ブームの姿勢変化による車両の傾きの変化」、「伸縮部摺動板の摩耗によるバックラッシュの増大」等により、ブームの先端の位置を精度よく特定できないという問題がある。すなわち、センサの値に基づき特定したブームの先端の位置と実際のブームの先端の位置との間にズレが生じ得る。このため、上述のようなレベルでの高精度な位置合わせを実現することは難しい。
【0009】
また、ブームの先端の位置合わせを行う処理の他の一例として、画像解析の利用が挙げられる。具体的には、孔とブームの先端とが写る画像を解析して孔とブームの先端の位置のずれを算出し、算出結果に基づきブームの先端の位置合わせを行う。しかし、画像解析の利用のみでは、孔の向き(孔の深さ方向)を精度よく測定できない。孔の向きが不明である場合、ロックボルト等を所望の方向(孔の深さ方向)で挿入できない。例えば、カメラをブームの先端に配置し、カメラとブームの向きを揃えたうえで、孔の真正面にカメラを位置させ孔を正面から撮影すれば、孔の奥まで撮影できるので、孔の向きを精度良く測定することができる。しかし、このような撮影を実現するのは難しい。例えば、カメラをブームの先端に取り付ける事は難しい。カメラをブームの先端に取り付けると、カメラが汚れやすくなる。カメラが汚れると、孔等を高精度に撮影できない。カメラをブームの先端に取り付けない場合は位置合わせ完了時点で孔を斜めから撮影することになるため、カメラで撮影した画像のみで孔の向きを精度良く測定することは難しい。
【0010】
本発明の目的の一例は、上述した問題を鑑み、ブームの先端をトンネル壁面の孔の位置に所定の向きで高精度に位置させるという課題を解決する処理装置及び処理方法を提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
清水建設株式会社
滑り支承
10日前
清水建設株式会社
滑り支承
16日前
清水建設株式会社
床センサ
16日前
清水建設株式会社
空調システム
16日前
清水建設株式会社
切断装置および切断方法
10日前
清水建設株式会社
切断装置および切断方法
18日前
清水建設株式会社
可燃性ガス希釈システム
3日前
清水建設株式会社
プレキャスト床版の施工方法
3日前
清水建設株式会社
仮設エレベータの盛替え方法
16日前
清水建設株式会社
汚染コンクリートの減容方法
3日前
清水建設株式会社
コンクリート床版の切断方法
10日前
清水建設株式会社
骨材抽出装置及び骨材抽出方法
16日前
清水建設株式会社
柱梁接合構造および柱梁接合方法
2日前
清水建設株式会社
医療従事者の被曝量評価プログラム
2日前
清水建設株式会社
自律移動体装置、経路計算方法、及びプログラム
16日前
清水建設株式会社
未使用生コンクリートの処理方法および造粒化材料
3日前
清水建設株式会社
エレベータ吊り機、およびエレベータシャフト構造
16日前
清水建設株式会社
ロボットシステム、ロボット、及びロボット制御方法
16日前
清水建設株式会社
地震動データ分類方法、及び、地震動データ分類装置
3日前
清水建設株式会社
プレキャスト床版の接合構造およびプレキャスト床版の接合方法
3日前
清水建設株式会社
学習システム、移動体自律運転システム、学習方法、移動体自律運転方法
17日前
清水建設株式会社
揚重分析装置、揚重分析システム、学習システム、揚重分析方法、学習方法
16日前
清水建設株式会社
混合構造梁における端部RC造部内のコンクリート部と鉄骨梁部との間の摩擦係数推定方法
3日前
清水建設株式会社
地震動評価モデル生成方法、地震動評価モデル生成装置、地震動評価方法、及び、地震動評価装置
3日前
個人
ずり積込み装置
4か月前
株式会社エステック
掘削機
3か月前
株式会社奥村組
削孔システム
3か月前
能美防災株式会社
水噴霧設備
2か月前
株式会社奥村組
シールド掘進機
1か月前
株式会社奥村組
シールド掘進機
1か月前
株式会社奥村組
シールド掘進機
1か月前
株式会社神島組
破砕工法
18日前
株式会社奥村組
シールド掘進機
1か月前
株式会社奥村組
シールド掘進機
1か月前
戸田建設株式会社
ロックボルト
18日前
株式会社奥村組
シールド掘進機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ