TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024159114
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023074897
出願日
2023-04-28
発明の名称
ロボットシステム、ロボット、及びロボット制御方法
出願人
清水建設株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20241031BHJP(制御;調整)
要約
【課題】災害が発生した際に、適切にロボットを避難させる。
【解決手段】ロボットシステムは、対象施設を管理する管理装置と、前記対象施設内を自律移動可能なロボットとを備えるロボットシステムであって、前記管理装置は、前記対象施設に災害が発生した際に、避難方向に応じて、周波数を変更して、前記対象施設内に設置されている誘導灯を点滅させる防災指示発信部を備え、前記ロボットは、前記誘導灯を含む防災誘導設備を撮像可能な撮像部と、前記対象施設に災害が発生したことを検知した場合に、前記撮像部が前記誘導灯を撮像した撮像画像に基づいて、前記誘導灯が点滅している周波数である点滅周波数を検出し、検出した前記点滅周波数に応じた前記避難方向に、前記ロボットを自律移動させるロボット制御部とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
対象施設を管理する管理装置と、前記対象施設内を自律移動可能なロボットとを備えるロボットシステムであって、
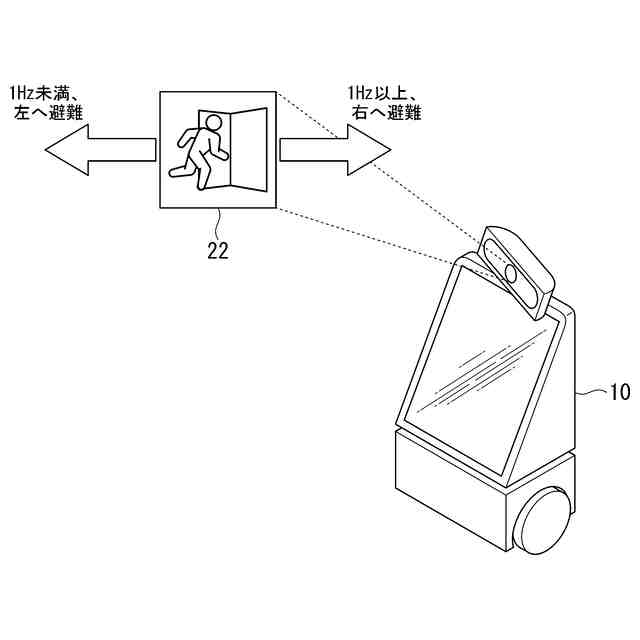
前記管理装置は、前記対象施設に災害が発生した際に、避難方向に応じて、周波数を変更して、前記対象施設内に設置されている誘導灯を点滅させる防災指示発信部を備え、
前記ロボットは、
前記誘導灯を含む防災誘導設備を撮像可能な撮像部と、
前記対象施設に災害が発生したことを検知した場合に、前記撮像部が前記誘導灯を撮像した撮像画像に基づいて、前記誘導灯が点滅している周波数である点滅周波数を検出し、検出した前記点滅周波数に応じた前記避難方向に、前記ロボットを自律移動させるロボット制御部と
を備えるロボットシステム。
続きを表示(約 1,500 文字)
【請求項2】
前記ロボット制御部は、前記点滅周波数が閾値以上であるか否かに応じて、左右の前記避難方向を決定して前記ロボットを自律移動させる
請求項1に記載のロボットシステム。
【請求項3】
前記防災誘導設備には、前記対象施設内に設置されている電子掲示板が含まれ、
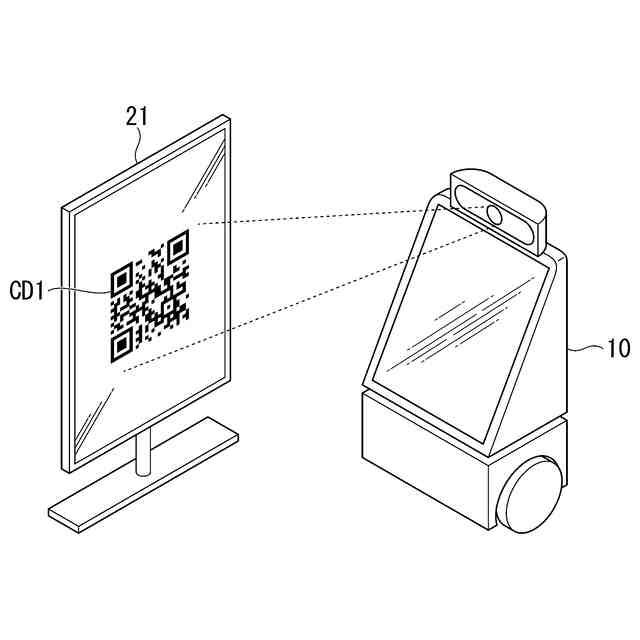
前記防災指示発信部は、前記対象施設に災害が発生した際に、前記対象施設の防災情報と、前記災害の発生場所及び被害情報を含む災害情報とに基づいて、避難経路を生成し、生成した前記避難経路に基づく避難指示情報を示す二次元コードを、前記電子掲示板に表示させ、
前記ロボット制御部は、前記対象施設に災害が発生したことを検知した場合に、前記撮像部が撮像した撮像画像に含まれる前記二次元コードが示す前記避難指示情報に基づいて、前記ロボットを自律移動させる
請求項1に記載のロボットシステム。
【請求項4】
前記防災誘導設備には、一定の周波数の音響による警報を発生する警報器が含まれ、
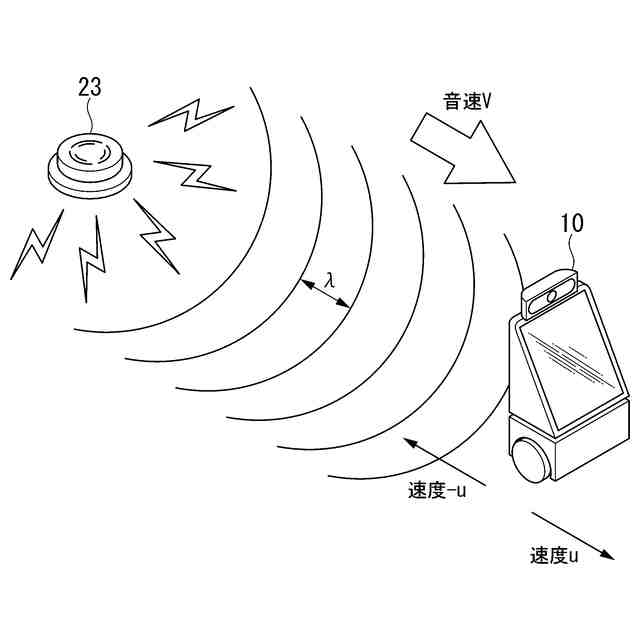
前記防災指示発信部は、前記対象施設に災害が発生した際に、前記災害の発生場所及び危険場所の付近にある前記警報器に、前記警報を発生させ、
前記ロボットは、前記警報を収音する収音部を備え、
前記ロボット制御部は、前記対象施設に災害が発生したことを検知した場合に、前記ロボットの移動に伴うドップラー効果を用いて、前記収音部が収音した前記警報の周波数の変化から前記危険場所の方向を判定し、前記危険場所の方向を避けるように、前記ロボットを自律移動させる
請求項1に記載のロボットシステム。
【請求項5】
前記防災指示発信部は、無線通信により、前記対象施設内に、避難が不要であることを示す避難不要情報を一定間隔で発信し、
前記ロボットは、前記無線通信により、通信可能な通信部を備え、
前記ロボット制御部は、前記通信部により、前記避難不要情報を一定期間受信できなかった場合に、前記対象施設に災害が発生したと検知する
請求項1から請求項4のいずれか一項に記載のロボットシステム。
【請求項6】
対象施設に災害が発生した際に、避難方向に応じて、周波数を変更して、前記対象施設内に設置されている誘導灯を点滅させる防災指示発信部を備え、前記対象施設を管理する管理装置と、前記対象施設内を自律移動可能なロボットとを備えるロボットシステムのロボットであって、
前記誘導灯を含む防災誘導設備を撮像可能な撮像部と、
前記対象施設に災害が発生したことを検知した場合に、前記撮像部が前記誘導灯を撮像した撮像画像に基づいて、前記誘導灯が点滅している周波数である点滅周波数を検出し、検出した前記点滅周波数に応じた前記避難方向に、前記ロボットを自律移動させるロボット制御部と
を備えるロボット。
【請求項7】
対象施設を管理する管理装置と、前記対象施設内を自律移動可能なロボットとを備えるロボットシステムのロボット制御方法であって、
前記管理装置が、前記対象施設に災害が発生した際に、避難方向に応じて、周波数を変更して、前記対象施設内に設置されている誘導灯を点滅させる誘導指示発信ステップと、
前記ロボットが、前記対象施設に災害が発生したことを検知した場合に、前記誘導灯を含む防災誘導設備を撮像可能な撮像部が前記誘導灯を撮像した撮像画像に基づいて、前記誘導灯が点滅している周波数である点滅周波数を検出し、検出した前記点滅周波数に応じた前記避難方向に、前記ロボットを自律移動させるロボット制御ステップと
を含むロボット制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステム、ロボット、及びロボット制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、施設内でロボットを使用するロボットシステムが知られている(例えば、特許文献1を参照)。このような従来のロボットシステムでは、災害が発生した際に、ロボットを災害の発生場所から緊急避難させるために、例えば、無線通信などの通信手段を用いて、避難支援を行っていた。
【先行技術文献】
【特許文献】
【0003】
特開2017-215626号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述したような従来技術のロボットシステムでは、災害が発生した際に、例えば、無線通信などの通信手段が使用できない場合や、災害により通路が寸断され、事前に決められた避難経路で移動できない場合に、ロボットを適切に避難させることが困難であった。
【0005】
本発明は、上記問題を解決すべくなされたもので、その目的は、災害が発生した際に、適切にロボットを避難させることができるロボットシステム、ロボット、及びロボット制御方法を提供することにある。
【課題を解決するための手段】
【0006】
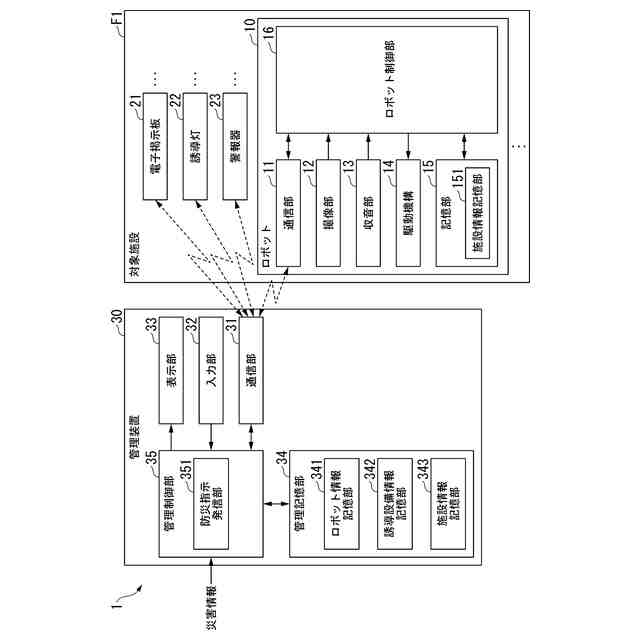
上記問題を解決するために、本発明の一態様は、対象施設を管理する管理装置と、前記対象施設内を自律移動可能なロボットとを備えるロボットシステムであって、前記管理装置は、前記対象施設に災害が発生した際に、避難方向に応じて、周波数を変更して、前記対象施設内に設置されている誘導灯を点滅させる防災指示発信部を備え、前記ロボットは、前記誘導灯を含む防災誘導設備を撮像可能な撮像部と、前記対象施設に災害が発生したことを検知した場合に、前記撮像部が前記誘導灯を撮像した撮像画像に基づいて、前記誘導灯が点滅している周波数である点滅周波数を検出し、検出した前記点滅周波数に応じた前記避難方向に、前記ロボットを自律移動させるロボット制御部とを備えるロボットシステムである。
【0007】
また、本発明の一態様は、対象施設に災害が発生した際に、避難方向に応じて、周波数を変更して、前記対象施設内に設置されている誘導灯を点滅させる防災指示発信部を備え、前記対象施設を管理する管理装置と、前記対象施設内を自律移動可能なロボットとを備えるロボットシステムのロボットであって、前記誘導灯を含む防災誘導設備を撮像可能な撮像部と、前記対象施設に災害が発生したことを検知した場合に、前記撮像部が前記誘導灯を撮像した撮像画像に基づいて、前記誘導灯が点滅している周波数である点滅周波数を検出し、検出した前記点滅周波数に応じた前記避難方向に、前記ロボットを自律移動させるロボット制御部とを備えるロボットである。
【0008】
また、本発明の一態様は、対象施設を管理する管理装置と、前記対象施設内を自律移動可能なロボットとを備えるロボットシステムのロボット制御方法であって、前記管理装置が、前記対象施設に災害が発生した際に、避難方向に応じて、周波数を変更して、前記対象施設内に設置されている誘導灯を点滅させる誘導指示発信ステップと、前記ロボットが、前記対象施設に災害が発生したことを検知した場合に、前記誘導灯を含む防災誘導設備を撮像可能な撮像部が前記誘導灯を撮像した撮像画像に基づいて、前記誘導灯が点滅している周波数である点滅周波数を検出し、検出した前記点滅周波数に応じた前記避難方向に、前記ロボットを自律移動させるロボット制御ステップとを含むロボット制御方法である。
【発明の効果】
【0009】
本発明によれば、災害が発生した際に、適切にロボットを避難させることができる。
【図面の簡単な説明】
【0010】
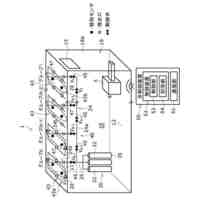
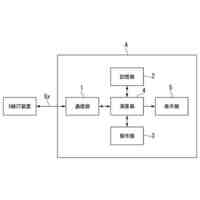
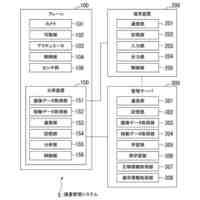
本実施形態によるロボットシステムの一例を示すブロック図である。
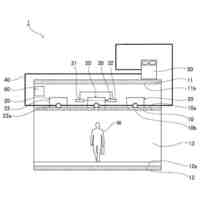
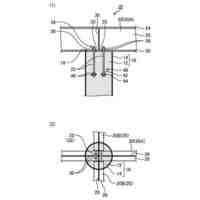
本実施形態における二次元コードを用いたロボットの自律避難の一例を示す図である。
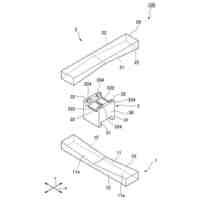
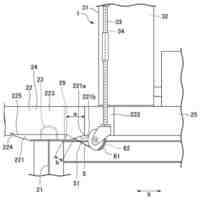
本実施形態における誘導灯を用いたロボットの自律避難の一例を示す図である。
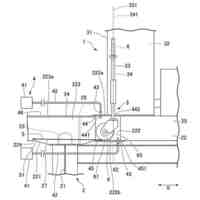
本実施形態における警報器を用いたロボットの自律避難の一例を示す図である。
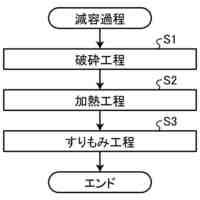
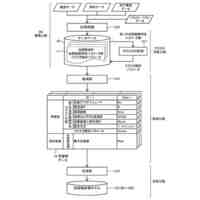
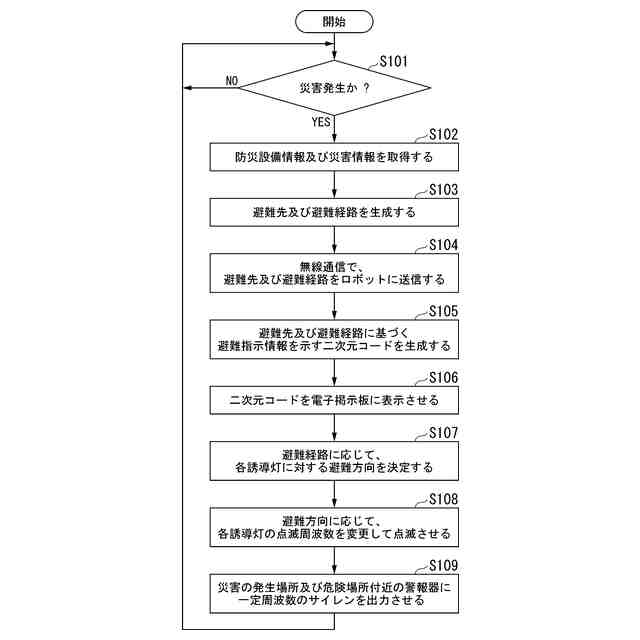
本実施形態によるロボットシステムの管理装置の動作の一例を示すフローチャートである。
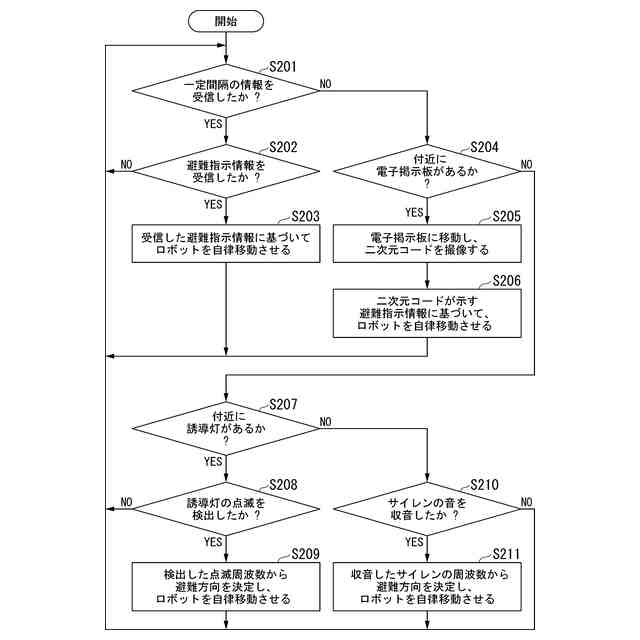
本実施形態によるロボットシステムのロボットの動作の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
清水建設株式会社
床センサ
16日前
清水建設株式会社
滑り支承
10日前
清水建設株式会社
空調システム
16日前
清水建設株式会社
可燃性ガス希釈システム
3日前
清水建設株式会社
切断装置および切断方法
10日前
清水建設株式会社
コンクリート床版の切断方法
10日前
清水建設株式会社
汚染コンクリートの減容方法
3日前
清水建設株式会社
プレキャスト床版の施工方法
3日前
清水建設株式会社
骨材抽出装置及び骨材抽出方法
16日前
清水建設株式会社
柱梁接合構造および柱梁接合方法
2日前
清水建設株式会社
医療従事者の被曝量評価プログラム
2日前
清水建設株式会社
未使用生コンクリートの処理方法および造粒化材料
3日前
清水建設株式会社
ロボットシステム、ロボット、及びロボット制御方法
16日前
清水建設株式会社
地震動データ分類方法、及び、地震動データ分類装置
3日前
清水建設株式会社
プレキャスト床版の接合構造およびプレキャスト床版の接合方法
3日前
清水建設株式会社
揚重分析装置、揚重分析システム、学習システム、揚重分析方法、学習方法
16日前
清水建設株式会社
混合構造梁における端部RC造部内のコンクリート部と鉄骨梁部との間の摩擦係数推定方法
3日前
清水建設株式会社
地震動評価モデル生成方法、地震動評価モデル生成装置、地震動評価方法、及び、地震動評価装置
3日前
個人
方向検出器
3日前
ugo株式会社
移動体
3日前
積水樹脂株式会社
磁性シート
1か月前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
無人走行体
1か月前
株式会社豊田自動織機
自動走行体
2か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
トヨタ自動車株式会社
自律移動体
2日前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
搬送ロボット
16日前
株式会社熊谷組
巡回ルート作成装置
1か月前
オムロン株式会社
自律作業システム
1か月前
トヨタ自動車株式会社
搬送システム
26日前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
トヨタ自動車株式会社
ロボットシステム
26日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ