TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024154074
公報種別
公開特許公報(A)
公開日
2024-10-30
出願番号
2023067687
出願日
2023-04-18
発明の名称
移動時間推定システム及び移動時間推定方法
出願人
清水建設株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20241023BHJP(制御;調整)
要約
【課題】ロボットによる移動時間を推定できる移動時間推定システム及び移動時間推定方法を提供すること。
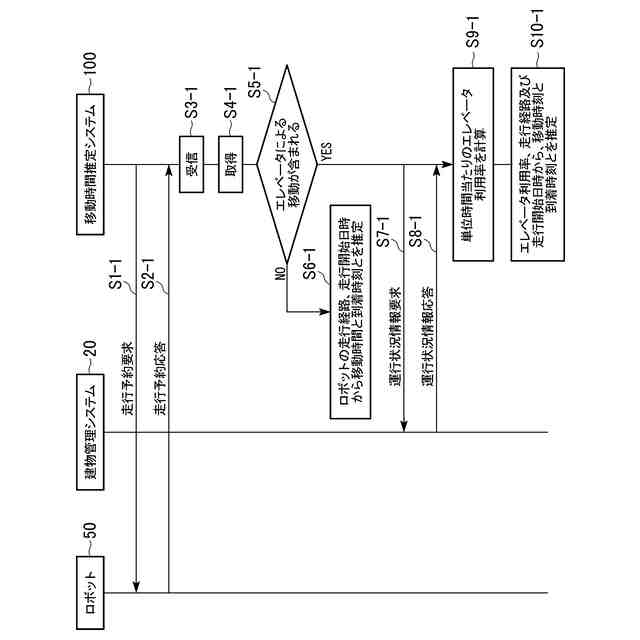
【解決手段】移動時間推定システムは、ロボットの走行経路情報及び走行開始日時情報と、ロボットが走行する建物に設置されたエレベータの運行状況情報とを取得する取得部と、ロボットの走行経路情報にエレベータによる移動が含まれる場合には運行状況情報、走行経路情報及び走行開始日時情報からロボットの移動時間を推定する推定部とを備える。
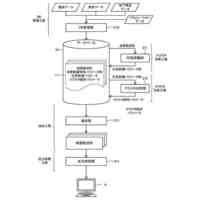
【選択図】図1
特許請求の範囲
【請求項1】
ロボットの走行経路情報及び走行開始日時情報と、前記ロボットが走行する建物に設置されたエレベータの運行状況情報とを取得する取得部と、
前記ロボットの走行経路情報に前記エレベータによる移動が含まれる場合には前記運行状況情報、前記走行経路情報及び前記走行開始日時情報から前記ロボットの移動時間を推定する推定部と
を備える、移動時間推定システム。
続きを表示(約 830 文字)
【請求項2】
前記推定部は、前記ロボットの走行経路情報に前記エレベータによる移動が含まれない場合には前記走行経路情報及び前記走行開始日時情報から前記ロボットの移動時間を推定する、請求項1に記載の移動時間推定システム。
【請求項3】
前記運行状況情報は、時間帯ごとのエレベータ利用率情報を含む、請求項1に記載の移動時間推定システム。
【請求項4】
前記推定部は、前記ロボットの走行経路情報に前記エレベータによる移動が含まれる場合に、前記運行状況情報から前記走行開始日時情報に対応するエレベータ利用率情報を取得し、取得した前記エレベータ利用率情報と前記エレベータの基本移動時間とに基づいて前記エレベータによる移動時間を推定する、請求項3に記載の移動時間推定システム。
【請求項5】
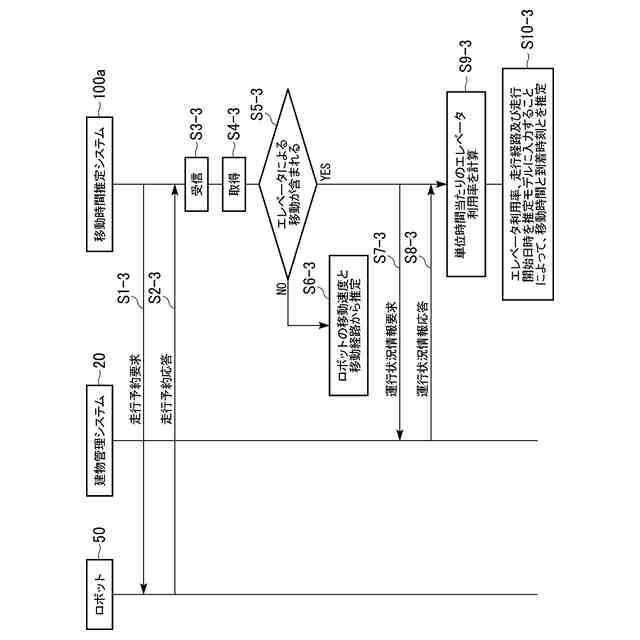
前記推定部は、前記ロボットの走行経路情報、前記ロボットの走行開始日時情報及び前記走行開始日時情報に対応するエレベータ利用率情報と、前記ロボットの移動時間との関係を機械学習しており、前記ロボットの走行経路情報に前記エレベータによる移動が含まれる場合に、前記取得部が取得した前記運行状況情報から前記走行開始日時情報に対応するエレベータ利用率情報を取得し、取得した前記エレベータ利用率情報、前記取得部が取得した前記走行経路情報、前記走行開始日時情報及び当該機械学習の結果に基づいて前記ロボットの移動時間を推定する、請求項3に記載の移動時間推定システム。
【請求項6】
ロボットの走行経路情報及び走行開始日時情報と、前記ロボットが走行する建物に設置されたエレベータの運行状況情報とを取得し、
前記ロボットの走行経路情報に前記エレベータによる移動が含まれる場合には前記運行状況情報、前記走行経路情報及び前記走行開始日時情報から前記ロボットの移動時間を推定する、移動時間推定システムが実行する移動時間推定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動時間推定システム及び移動時間推定方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
ロボット技術の普及に伴って、人による作業をロボットに代替させることによって人員不足を補うことが望まれている。現在では様々な用途の自動走行ロボットが開発されており、配送、警備、清掃、案内などの各種業務をロボットが自律的に判断し遂行することが期待されている。
清掃ロボットを運搬して、清掃ロボットが指定されたフロアの廊下部分を無人で清掃するとともに、かつ、異常が発生した場合には、清掃ロボットの状態を警報により検出する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2007-137650号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
人とロボットとでは移動の際にかかる時間に差がある。これは移動の際にとる経路の違い、障害物の避け方や建物設備の利用の仕方の差異などが原因である。特にロボットはエレベータの乗り降りの際に無線通信を通してエレベータを管理するシステムとの連携が必要となる関係で、エレベータによる移動時間が人とロボットで大きく異なる場合がある。ロボットによる移動時間が不明瞭な状態は、各用途でロボットの利用を検討する際の障壁となり得る。
本発明の目的は、ロボットによる移動時間を推定できる移動時間推定システム及び移動時間推定方法を提供することである。
【課題を解決するための手段】
【0005】
(1)本発明の一態様は、ロボットの走行経路情報及び走行開始日時情報と、前記ロボットが走行する建物に設置されたエレベータの運行状況情報とを取得する取得部と、前記ロボットの走行経路情報に前記エレベータによる移動が含まれる場合には前記運行状況情報、前記走行経路情報及び前記走行開始日時情報から前記ロボットの移動時間を推定する推定部とを備える、移動時間推定システムである。
(2)本発明の一態様は、前記推定部は、前記ロボットの走行経路情報に前記エレベータによる移動が含まれない場合には前記走行経路情報及び前記走行開始日時情報から前記ロボットの移動時間を推定する、上記(1)に記載の移動時間推定システムである。
(3)本発明の一態様は、前記運行状況情報は、時間帯ごとのエレベータ利用率情報を含む、上記(1)に記載の移動時間推定システムである。
(4)本発明の一態様は、前記推定部は、前記ロボットの走行経路情報に前記エレベータによる移動が含まれる場合に、前記運行状況情報から前記走行開始日時情報に対応するエレベータ利用率情報を取得し、取得した前記エレベータ利用率情報と前記エレベータの基本移動時間とに基づいて前記エレベータによる移動時間を推定する、上記(3)に記載の移動時間推定システムである。
(5)本発明の一態様は、前記推定部は、前記ロボットの走行経路情報、前記ロボットの走行開始日時情報及び前記走行開始日時情報に対応するエレベータ利用率情報と、前記ロボットの移動時間との関係を機械学習しており、前記ロボットの走行経路情報に前記エレベータによる移動が含まれる場合に、前記取得部が取得した前記運行状況情報から前記走行開始日時情報に対応するエレベータ利用率情報を取得し、取得した前記エレベータ利用率情報、前記取得部が取得した前記走行経路情報、前記走行開始日時情報及び当該機械学習の結果に基づいて前記ロボットの移動時間を推定する、上記(3)に記載の移動時間推定システムである。
【0006】
(6)本発明の一態様は、ロボットの走行経路情報及び走行開始日時情報と、前記ロボットが走行する建物に設置されたエレベータの運行状況情報とを取得し、前記ロボットの走行経路情報に前記エレベータによる移動が含まれない場合には前記走行経路情報及び前記走行開始日時情報から前記ロボットの移動時間を推定し、前記ロボットの走行経路情報に前記エレベータによる移動が含まれる場合には前記運行状況情報、前記走行経路情報及び前記走行開始日時情報から前記ロボットの移動時間を推定する、移動時間推定システムが実行する移動時間推定方法である。
【発明の効果】
【0007】
本発明によれば、ロボットによる移動時間を推定できるのでロボットの到達時刻を予想し、作業計画を立てることができるという効果が得られる。
【図面の簡単な説明】
【0008】
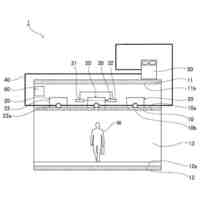
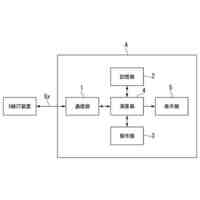
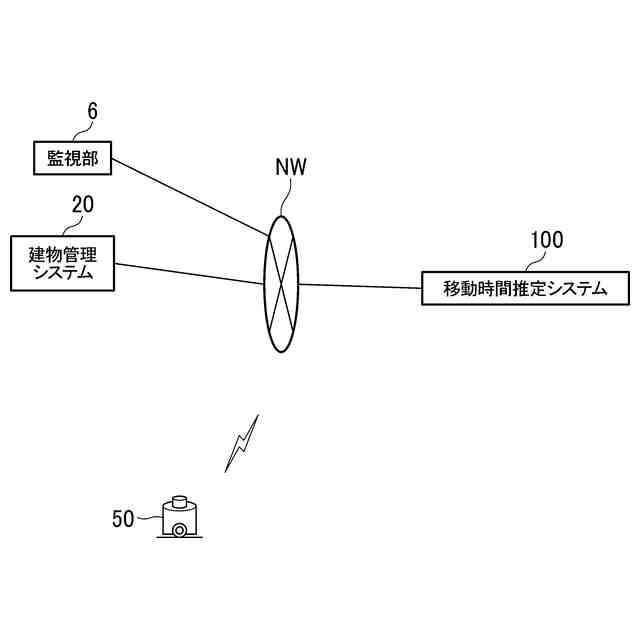
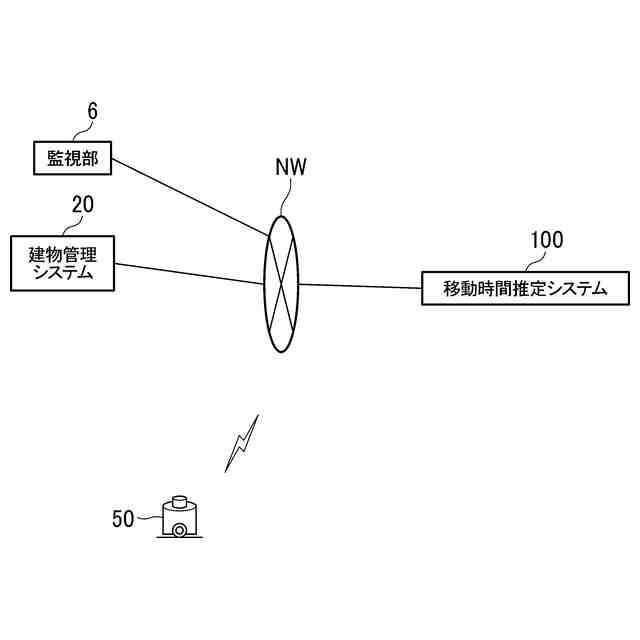
本発明の実施形態に係る移動時間推定システム100の一例を示す図である。
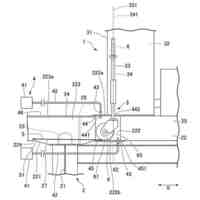
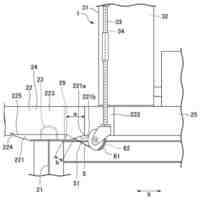
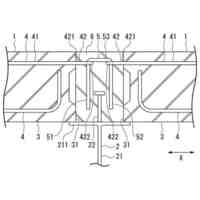
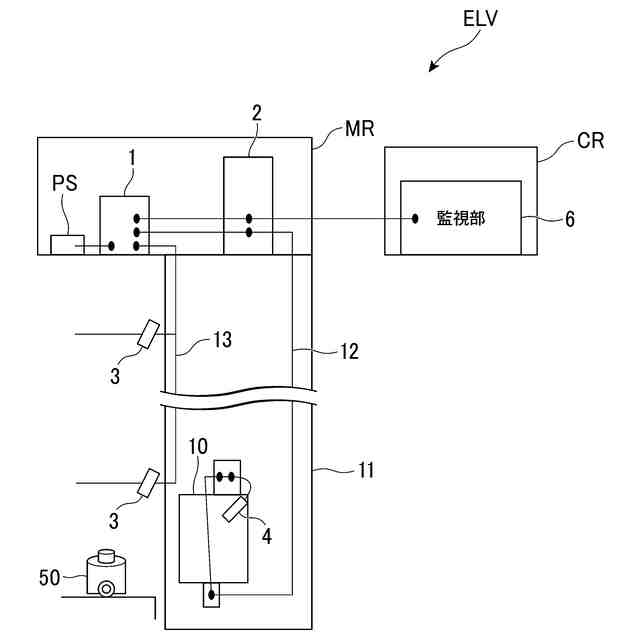
エレベータシステムELVの一例を示す概念図である。
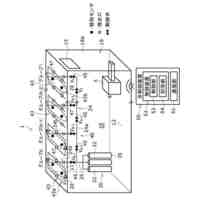
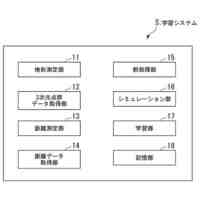
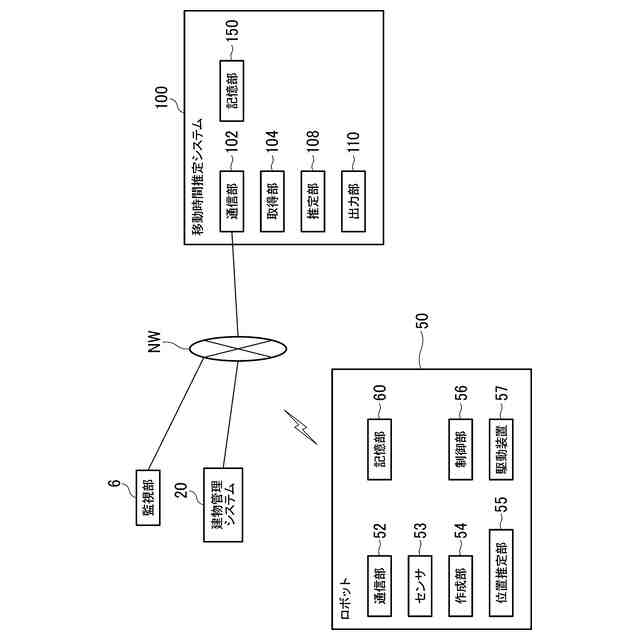
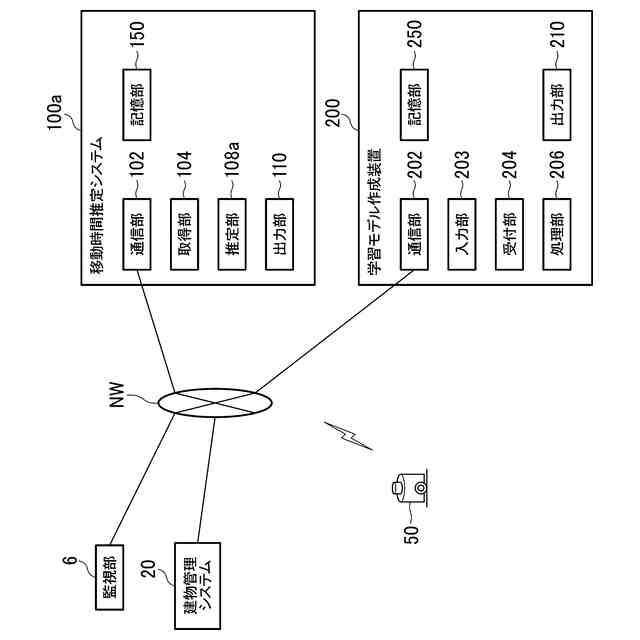
本実施形態に係るロボット50及び移動時間推定システム100の一例を示すブロック図である。
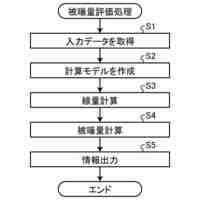
本実施形態に係る移動時間推定システム100の動作の一例を示すフローチャートである。
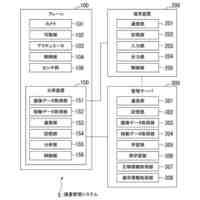
本実施形態の変形例に係る移動時間推定システム100aの一例を示す図である。
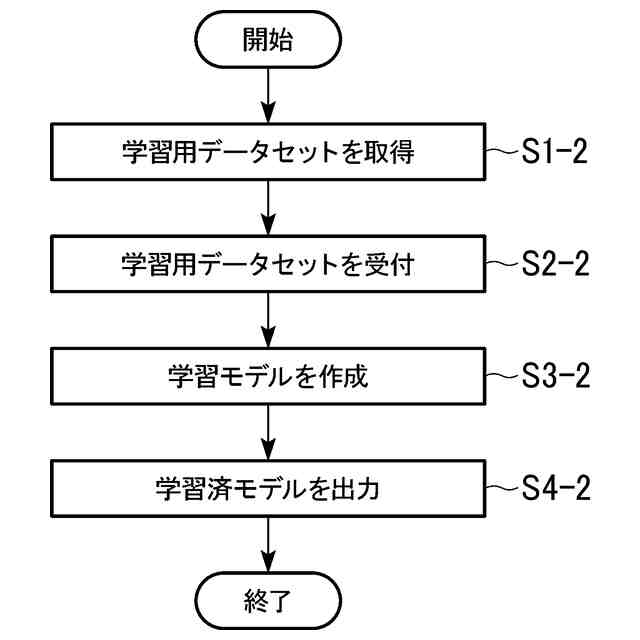
実施形態の変形例に係る学習モデル作成装置200の動作の一例を示すフローチャートである。
本実施形態に係る移動時間推定システム100aの動作の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
次に、本実施形態の移動時間推定システム及び移動時間推定方法を、図面を参照しつつ説明する。以下で説明する実施形態は一例に過ぎず、本発明が適用される実施形態は、以下の実施形態に限られない。
なお、実施形態を説明するための全図において、同一の機能を有するものは同一符号を用い、繰り返しの説明は省略する。
また、本願でいう「XXに基づいて」とは、「少なくともXXに基づく」ことを意味し、XXに加えて別の要素に基づく場合も含む。また、「XXに基づいて」とは、XXを直接に用いる場合に限定されず、XXに対して演算や加工が行われたものに基づく場合も含む。「XX」は、任意の要素(例えば、任意の情報)である。
【0010】
(実施形態)
(移動時間推定システム)
図1は、本発明の実施形態に係る移動時間推定システム100の一例を示す図である。図1には、移動時間推定システム100に加え、監視部6、ロボット50及び建物管理システム20が示されている。移動時間推定システム100、監視部6、ロボット50及び建物管理システム20は、ネットワークNWを介して通信する。ネットワークNWは、例えば、インターネット、WAN(Wide Area Network)、LAN(Local Area Network)、プロバイダ装置、無線基地局などを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
清水建設株式会社
滑り支承
20日前
清水建設株式会社
遮蔽機構
今日
清水建設株式会社
免震装置
今日
清水建設株式会社
床センサ
20日前
清水建設株式会社
滑り支承
14日前
清水建設株式会社
杭圧入機
29日前
清水建設株式会社
空調システム
20日前
清水建設株式会社
切断装置および切断方法
14日前
清水建設株式会社
切断装置および切断方法
22日前
清水建設株式会社
可燃性ガス希釈システム
7日前
清水建設株式会社
仮設エレベータの盛替え方法
20日前
清水建設株式会社
汚染コンクリートの減容方法
7日前
清水建設株式会社
コンクリート床版の切断方法
14日前
清水建設株式会社
プレキャスト床版の施工方法
7日前
清水建設株式会社
骨材抽出装置及び骨材抽出方法
20日前
清水建設株式会社
柱梁接合構造および柱梁接合方法
6日前
清水建設株式会社
医療従事者の被曝量評価プログラム
6日前
清水建設株式会社
移動時間推定システム及び移動時間推定方法
29日前
清水建設株式会社
自律移動体装置、経路計算方法、及びプログラム
20日前
清水建設株式会社
多孔質材料の洗浄装置及び多孔質材料の洗浄方法
1か月前
清水建設株式会社
未使用生コンクリートの処理方法および造粒化材料
7日前
清水建設株式会社
エレベータ吊り機、およびエレベータシャフト構造
20日前
清水建設株式会社
ロボットシステム、ロボット、及びロボット制御方法
20日前
清水建設株式会社
地震動データ分類方法、及び、地震動データ分類装置
7日前
清水建設株式会社
移動体用モーションキャプチャのキャリブレーション方法
22日前
清水建設株式会社
災害リスク評価装置、災害リスク評価方法、及びプログラム
28日前
清水建設株式会社
プレキャスト床版の接合構造およびプレキャスト床版の接合方法
7日前
清水建設株式会社
学習システム、移動体自律運転システム、学習方法、移動体自律運転方法
21日前
清水建設株式会社
揚重分析装置、揚重分析システム、学習システム、揚重分析方法、学習方法
20日前
清水建設株式会社
防音壁及び防音壁の設計方法、パーティション及びパーティションの設計方法
今日
清水建設株式会社
混合構造梁における端部RC造部内のコンクリート部と鉄骨梁部との間の摩擦係数推定方法
7日前
清水建設株式会社
地震動評価モデル生成方法、地震動評価モデル生成装置、地震動評価方法、及び、地震動評価装置
7日前
一般財団法人先端建設技術センター
肌落ち予測装置、機械学習装置、肌落ち予測方法、及び、機械学習方法
28日前
一般財団法人先端建設技術センター
こそく支援システム、機械学習装置、情報処理装置、こそく支援方法、機械学習方法、情報処理方法
28日前
個人
方向検出器
7日前
ugo株式会社
移動体
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ