TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024156335
公報種別
公開特許公報(A)
公開日
2024-11-06
出願番号
2023070709
出願日
2023-04-24
発明の名称
移動体用モーションキャプチャのキャリブレーション方法
出願人
清水建設株式会社
,
戸田建設株式会社
,
西松建設株式会社
,
前田建設工業株式会社
,
エフティーエス株式会社
代理人
弁理士法人永井国際特許事務所
主分類
E21D
11/10 20060101AFI20241029BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】移動体用モーションキャプチャシステムのキャリブレーション方法それを利用したモーションキャプチャシステムを提供する。
【解決手段】移動体上に設置された複数カメラの位置と角度を決定し、続いてキャリブレーション座標系のX軸方向、Y軸方向及びZ軸方向と方向が一致するようにカメラ座標系のX軸、Y軸、Z軸を設定し、さらにキャリブレーション座標系原点とカメラ座標系原点の関係を取得することによりカメラ座標系を設定する。移動体の位置、姿勢を計測することにより、モーションキャプチャシステムが捉えた対象物のキャリブレーション座標を確定することができる。
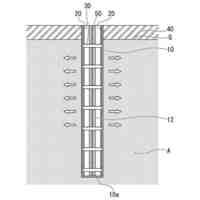
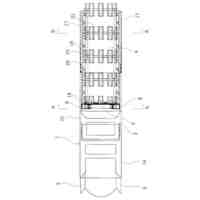
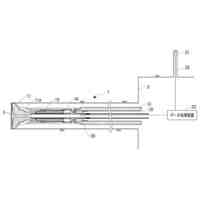
【選択図】図1
特許請求の範囲
【請求項1】
移動体上に複数のカメラを備えたモーションキャプチャシステムのキャリブレーション方法であって、
前記移動体の機械座標系の原点とキャリブレーション座標系の原点の関係を設定する工程、
前記複数のカメラ配置を決定する工程、
カメラ座標系及び前記機械座標系のX軸方向、Y軸方向、及びZ軸方向をキャリブレーション座標系のそれぞれX軸方向、Y軸方向、Z軸方向に合わせる工程、
カメラ座標系の原点と、キャリブレーション座標系の原点の関係を設定する工程、
を備えることを特徴とするモーションキャプチャシステムのキャリブレーション方法。
続きを表示(約 1,300 文字)
【請求項2】
移動体上に複数のカメラを備えたモーションキャプチャシステムのカメラが捉えた対象をキャリブレーション座標系で表示する方法であって、
前記移動体の機械座標系の原点とキャリブレーション座標系の原点の関係を設定する工程
前記複数のカメラ配置を決定する工程、
カメラ座標系及び前記機械座標系のX軸方向、Y軸方向、及びZ軸方向をキャリブレーション座標系のそれぞれX軸方向、Y軸方向、Z軸方向に合わせる工程、
カメラ座標系の原点と、キャリブレーション座標系の原点の関係を設定する工程、
移動体の位置、姿勢の変化からカメラ座標系の回転の程度を算出する工程、
モーションキャプチャ用カメラがとらえた対象物のカメラ座標系での座標をキャリブレーション座標系における座標に変換する工程、
を備えることを特徴とする表示方法。
【請求項3】
移動体上に複数のカメラを備えたモーションキャプチャシステムのキャリブレーション方法であって、
前記移動体の機械座標系の原点とキャリブレーション座標系の原点の関係を設定する工程、
前記複数のカメラ配置を決定する工程、
機械本体車軸方向と機械座標系のX軸方向を一致させ、かつ機械座標系のX軸方向、Y軸方向、Z軸方向をキャリブレーション座標系のそれぞれX軸方向、Y軸方向、Z軸方向に一致させた状況で、カメラ座標系のX軸方向、Y軸方向、Z軸方向をキャリブレーション座標系のそれぞれX軸方向、Y軸方向、Z軸方向に一致させる工程、
カメラ座標系の原点と、キャリブレーション座標系の原点の関係を設定する工程、
を備えることを特徴とするモーションキャプチャシステムのキャリブレーション方法。
【請求項4】
移動体上に複数のカメラを備えたモーションキャプチャシステムのカメラが捉えた対象をキャリブレーション座標系で表示する方法であって、
前記移動体の機械座標系の原点とキャリブレーション座標系の原点の関係を設定する工程、
前記複数のカメラ配置を決定する工程、
機械本体車軸方向と機械座標系のX軸方向を一致させ、かつ機械座標系のX軸方向、Y軸方向、Z軸方向をキャリブレーション座標系のそれぞれX軸方向、Y軸方向、Z軸方向に一致させた状況で、カメラ座標系のX軸方向、Y軸方向、Z軸方向をキャリブレーション座標系のそれぞれX軸方向、Y軸方向、Z軸方向に一致させる工程、
カメラ座標系の原点と、キャリブレーション座標系の原点の関係を設定する工程、
移動体の位置、姿勢の変化からカメラ座標系の回転の程度を算出する工程、
モーションキャプチャ用カメラがとらえた対象物のカメラ座標系での座標をキャリブレーション座標系における座標に変換する工程、
を備えることを特徴とする表示方法。
【請求項5】
移動体が建設機械である請求項1又は3に記載の、モーションキャプチャシステムのキャリブレーション方法。
【請求項6】
移動体が建設機械である請求項2又は4に記載の、モーションキャプチャシステムのカメラが捉えた対象をキャリブレーション座標系で表示する方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体用モーションキャプチャのキャリブレーション方法、及びそれを利用したモーションキャプチャシステムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
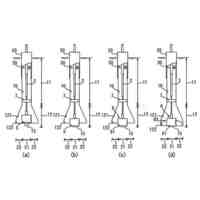
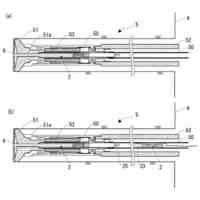
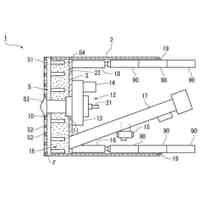
例えば、建設機械は、その建設作業のための各種のアーム(伸縮するブームであることもある。)を備え、そのアームの先端部に取り付けたアームなどの動作部を介して、作業するものが代表的である。
【0003】
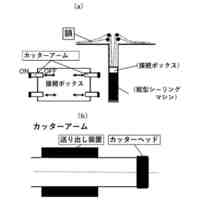
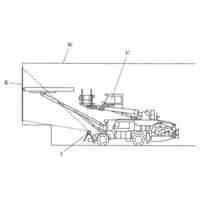
トンネル内に搬入する建設機械としては、切羽面の削孔などを行ういわゆるトンネルジャンボ、吹付機、鋼製支保工の建込み装置などがある。
【0004】
吹付機による吹付コンクリートは、リアルタイムに出来形を測定する方法がなく、作業員が目分量で吹き付けているのが実情である。リアルタイムに出来形を測定しながら、吹付を自動で行う技術が求められている。
【0005】
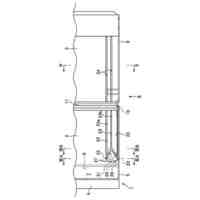
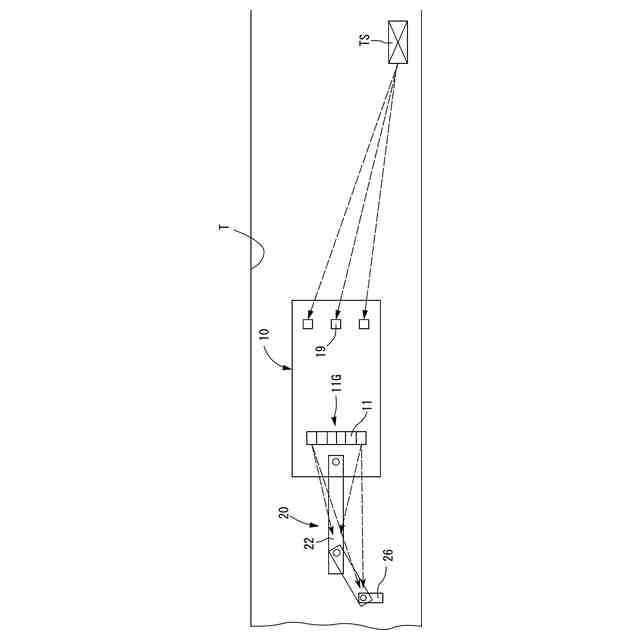
特許文献1は、支保工の建て込み方法及び建て込みシステムに関し、支保工の位置をリアルタイムに把握することのできる技術に関し、複数のモーションキャプチャ用カメラによって鋼製支保工の予め定められた複数の定点に設置されたモーションキャプチャ用マーカを撮影し、各モーションキャプチャ用カメラによって取得した撮影画像及び各モーションキャプチャ用カメラの3次元座標に基づいて各モーションキャプチャ用マーカの3次元座標を取得し、取得した各モーションキャプチャ用マーカの3次元座標に基づいて鋼製支保工を設計位置に建て込むものである。
ここで、モーションキャプチャ用マーカの3次元座標は、エレクタ装置上に設置されたターゲットの位置をトータルステーションにより測定し、予め定められた位置に設置されたモーションキャプチャ用カメラと、予め定められた位置に設定されたターゲットの相対位置関係により、モーションキャプチャ用カメラの3次元座標を算出することにより取得するものである。
この発明においては、対象物の3次元座標を取得するために、対象物のカメラ座標系を特定し、これを静止している座標系に変換するものではない。また、カメラはエレクタ装置上のカメラホルダに設置されるが、想定された3次元のX、Y、Z座標位置に精度よく設置することは困難であり、このためモーションキャプチャ用カメラで捉えた対象物の3次元座標を高精度に取得することは困難である。
【先行技術文献】
【特許文献】
【0006】
特開2019-173393号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
このようなモーションキャプチャ用カメラを含むモーションキャプチャ技術は有用である。
かかる背景技術に基づき、本発明者らは、吹付工において、リアルタイムに出来形を測定しながら、吹付を自動で行う技術を求めて、種々の開発を試みた。
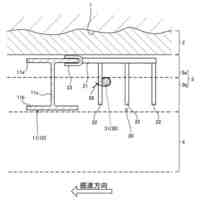
すなわち、吹付コンクリートのノズルやブームの近傍に反射体を取り付け、それをモーションキャプチャカメラで連続撮影し、画像分析することにより、吹付ノズルの位置及び動きをリアルタイムに算出できるのではないかと考え、実証実験を試みてきた。
【0008】
この過程において、建設機械のアーム部及び前記アーム部の先端部に取り付けた機素を動かしながら建設作業する際に、前記機素の位置及び動きを正確に捉えるためには、モーションキャプチャシステムを高精度にキャリブレーションする必要があることが判明した。
【0009】
本発明の主たる課題は、例えば、建設機械のアーム部及び前記アーム部の先端部に取り付けた機素を動かしながら建設作業する際に、前記機素の位置及び動きを適確に捉えて、所要の動作を実行できるようにするために使用されるモーションキャプチャシステムの高精度のキャリブレーション方法を提供することにある。また、モーションキャプチャシステムのカメラが捉えた対象をキャリブレーション座標系で表示する方法を提供することにある。
【課題を解決するための手段】
【0010】
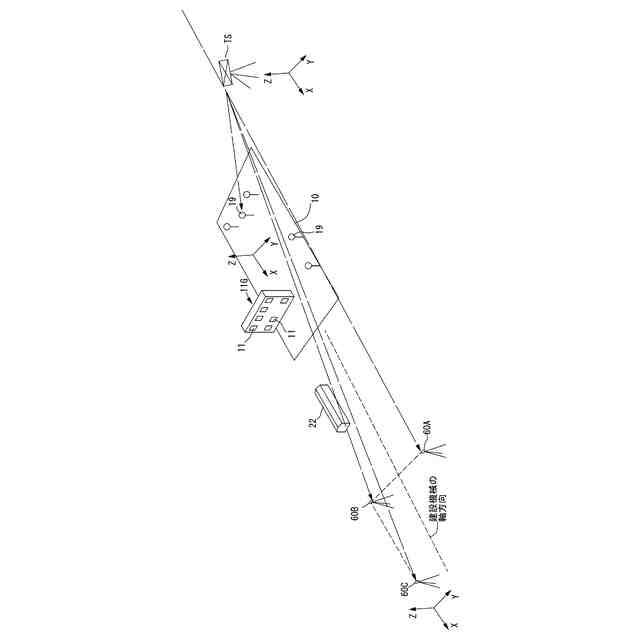
上記課題を解決するための手段の第1の態様は次のとおりである。
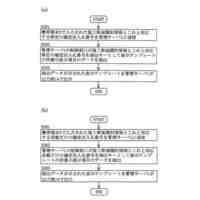
移動体上に複数のカメラを備えたモーションキャプチャシステムのキャリブレーション方法であって、
前記移動体の機械座標系の原点とキャリブレーション座標系の原点の関係を設定する工程、
前記複数のカメラ配置を決定する工程、
カメラ座標系及び前記機械座標系のX軸方向、Y軸方向、Z軸方向をキャリブレーション座標系のそれぞれX軸方向、Y軸方向、Z軸方向と一致させる工程、
カメラ座標系の原点と、キャリブレーション座標系の原点の関係を設定する工程、
を備えることを特徴とするモーションキャプチャシステムのキャリブレーション方法。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
清水建設株式会社
加熱井戸
3日前
清水建設株式会社
放射線遮蔽構造
3日前
清水建設株式会社
鉄骨プラズマ切断方法
今日
清水建設株式会社
鉄骨プラズマ切断装置
今日
清水建設株式会社
移動式クリーンルーム
3日前
株式会社クラレ
水硬性組成物と繊維構造体とを含む未硬化体、該未硬化体の硬化体、および繊維構造体
10日前
個人
高速道路トンネルの強靭化法
2か月前
株式会社エステック
掘削機及び掘削装置
1か月前
日本車輌製造株式会社
油圧ユニット
2か月前
西松建設株式会社
土層分布検知方法
2か月前
株式会社奥村組
電力線通信設備を用いた推進方法
3日前
鹿島建設株式会社
掘削方法
11日前
ニシオティーアンドエム株式会社
トンネル工事用作業装置
18日前
株式会社ケー・エフ・シー
注入材施工管理システム
2か月前
システム計測株式会社
ケリーバ保持治具
1か月前
鹿島建設株式会社
トンネル掘削機
2か月前
個人
発電用掘削方法および発電用掘削装置
2か月前
鹿島建設株式会社
線状体敷設方法
11日前
株式会社ケー・エフ・シー
補強注入構造及び地山補強工法
2か月前
大成建設株式会社
シールドトンネルとその施工方法
18日前
株式会社Lavie
土木作業装置
18日前
大成建設株式会社
拡翼掘削機
2か月前
個人
オープンシールド工法用コンクリート函体
2か月前
大成建設株式会社
切拡げ掘削面の支保構造の設計方法
3か月前
個人
オープンシールド工法用コンクリート函体
2か月前
三重重工業株式会社
耐寒用導水樋
11日前
株式会社安藤・間
移動式架台
1か月前
大成建設株式会社
支持ユニット
2か月前
清水建設株式会社
泥土評価システム、泥土評価方法
28日前
株式会社大林組
切羽前方探査方法
18日前
株式会社大林組
岩石コア採取システム
18日前
佐藤工業株式会社
山岳トンネルの切羽監視方法及び監視システム
2か月前
大成建設株式会社
中折れシールド掘削機
1か月前
清水建設株式会社
制御装置、制御方法、およびプログラム
1か月前
大豊建設株式会社
テールクリアランス計測装置
1か月前
中交第二公路工程局有限公司
TBM主駆動可視化潤滑装置及びその使用方法
25日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ