TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024139069
公報種別
公開特許公報(A)
公開日
2024-10-09
出願番号
2023049861
出願日
2023-03-27
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/26 20060101AFI20241002BHJP(水工;基礎;土砂の移送)
要約
【課題】蓄積される損傷度の定量化を精度よく行うことが可能な作業機械を提供する。
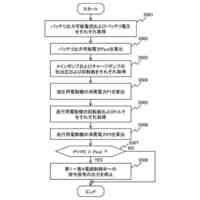
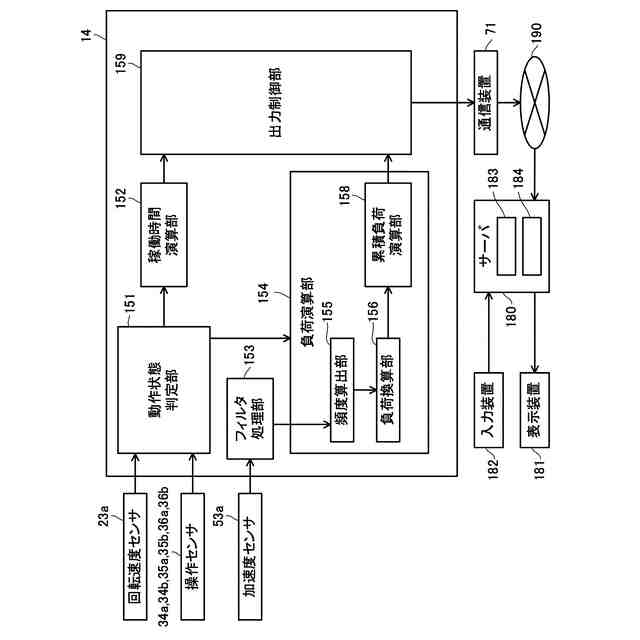
【解決手段】作業機械は、車体と、車体に取り付けられる作業装置と、車体または作業装置に取り付けられる加速度センサと、制御装置と、を備える。制御装置は、作業機械の稼働情報に基づいて、複数の動作状態のうち、いずれの動作状態であるのかを判定し、加速度センサの検出結果に基づいて、動作状態毎の振動の影響度による重み付けを行って、動作状態毎に作業機械に作用する負荷の累積値を表す累積負荷を演算し、動作状態毎の累積負荷を足し合わせることにより総累積負荷を演算し、総累積負荷を出力する。
【選択図】図5
特許請求の範囲
【請求項1】
車体と、前記車体に取り付けられる作業装置と、前記車体または前記作業装置に取り付けられる加速度センサと、制御装置と、を備える作業機械において、
前記制御装置は、
前記作業機械の稼働情報に基づいて、複数の動作状態のうち、いずれの動作状態であるのかを判定し、
前記加速度センサの検出結果に基づいて、前記動作状態毎の振動の影響度による重み付けを行って、前記動作状態毎に前記作業機械に作用する負荷の累積値を表す累積負荷を演算し、
前記動作状態毎の前記累積負荷を足し合わせることにより総累積負荷を演算し、
前記総累積負荷を出力する
ことを特徴とする作業機械。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の作業機械において、
前記車体は、走行体と、前記走行体に旋回輪を介して旋回可能に設けられた旋回体とを有し、
前記旋回体に搭載される原動機と、
前記原動機の回転速度を検出する回転速度センサと、
前記走行体、前記旋回体、及び前記作業装置に対する操作を検出する操作センサと、を備え、
前記稼働情報には、前記回転速度センサの検出結果及び前記操作センサの検出結果が含まれ、
前記制御装置は、
前記回転速度センサの検出結果に基づき、前記原動機が稼働している状態であるか否かを判定し、
前記操作センサの検出結果に基づき、前記走行体、前記旋回体、及び前記作業装置のそれぞれが操作されているか否かを判定し、
前記原動機が稼働している状態であり、かつ、前記走行体、前記旋回体、及び前記作業装置のいずれも操作されていない状態である場合には、前記動作状態をアイドル状態と判定し、
前記走行体が操作されている状態である場合には、前記動作状態を走行状態と判定し、
前記作業装置及び前記旋回体のうち少なくとも一方が操作されている状態である場合には、前記動作状態を作業状態と判定し、
前記アイドル状態での前記累積負荷を0とし、
前記作業状態での前記累積負荷と前記走行状態での前記累積負荷とを足し合わせることにより前記総累積負荷を演算する
ことを特徴とする作業機械。
【請求項3】
請求項2に記載の作業機械において、
前記作業状態での前記累積負荷の演算に用いる重み付けは、前記走行状態での前記累積負荷の演算に用いる重み付けよりも大きい
ことを特徴とする作業機械。
【請求項4】
請求項2に記載の作業機械において、
前記制御装置は、
前記動作状態毎の稼働時間を演算し、
前記動作状態毎の稼働時間を足し合わせることにより総稼働時間を演算し、
前記総稼働時間と前記総累積負荷とを対応付けて出力するとともに、前記動作状態毎の稼働時間及び前記総稼働時間に対する前記動作状態毎の稼働時間の割合の少なくとも一方を出力する
ことを特徴とする作業機械。
【請求項5】
請求項2に記載の作業機械において、
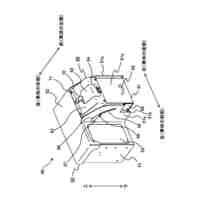
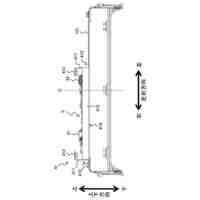
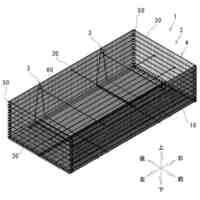
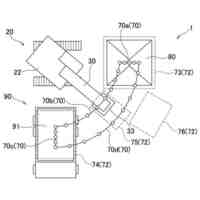
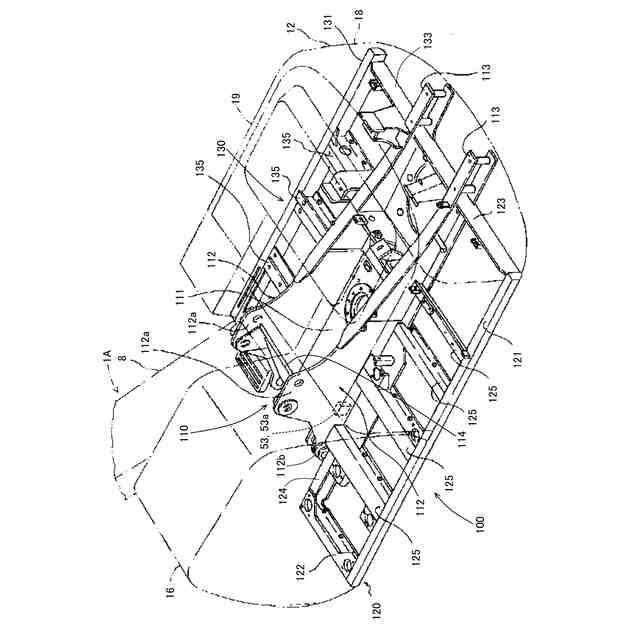
前記旋回体は、前記旋回輪により支持されるセンターフレームと、前記センターフレームの側方に設けられ前記センターフレームにより支持されるサイドフレームと、を有し、
前記加速度センサは、前記センターフレームに取り付けられている
ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
作業機械の消耗度を把握するために、作業機械の各動作状態の累積時間の合計を出力する作業機械が知られている(特許文献1参照)。なお、特許文献1に記載の作業機械は、合計累積時間だけでなく、所定のタイミング毎に走行振動を判定し、その判定結果を出力する。具体的には、特許文献1に記載の作業機械は、所定のタイミング毎に振動の大きさである振動強度を算出し、算出した振動強度を9つのレベルに分類し、9つの振動強度レベルのそれぞれに関して判定回数をカウントし、サーバに送信する(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
WO2021/025034A1
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術では、作業機械による日々の作業で蓄積される損傷度の定量化が難しい。このため、蓄積する損傷度を精度よく定量化できる技術が要望されている。
【0005】
本発明は、蓄積される損傷度の定量化を精度よく行うことが可能な作業機械を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様による作業機械は、車体と、前記車体に取り付けられる作業装置と、前記車体または前記作業装置に取り付けられる加速度センサと、制御装置と、を備える。前記制御装置は、前記作業機械の稼働情報に基づいて、複数の動作状態のうち、いずれの動作状態であるのかを判定し、前記加速度センサの検出結果に基づいて、前記動作状態毎の振動の影響度による重み付けを行って、前記動作状態毎に前記作業機械に作用する負荷の累積値を表す累積負荷を演算し、前記動作状態毎の前記累積負荷を足し合わせることにより総累積負荷を演算し、前記総累積負荷を出力する。
【発明の効果】
【0007】
本発明によれば、蓄積される損傷度の定量化を精度よく行うことが可能な作業機械を提供することができる。
【図面の簡単な説明】
【0008】
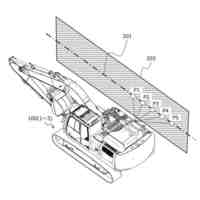
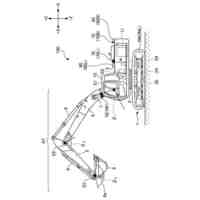
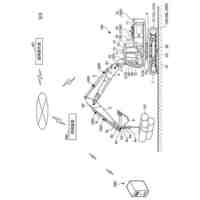
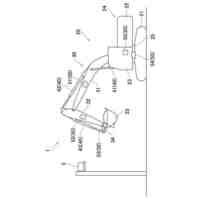
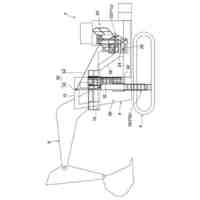
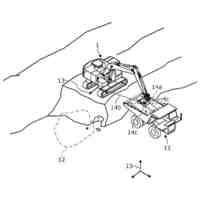
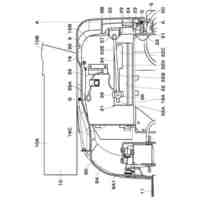
図1は、本発明の第1実施形態に係る油圧ショベルの構成図である。
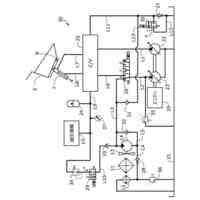
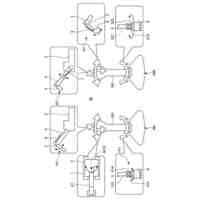
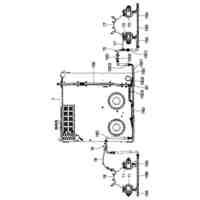
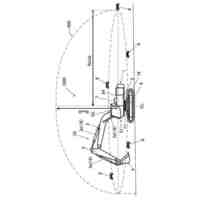
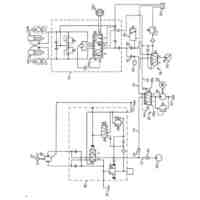
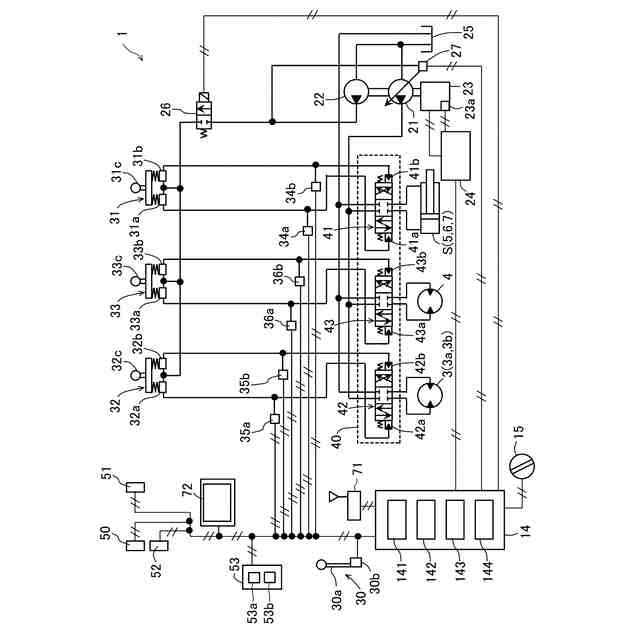
図2は、油圧ショベルのシステム構成を示す図である。
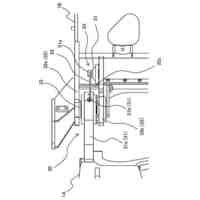
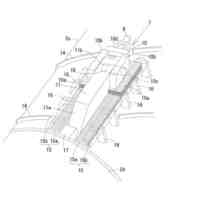
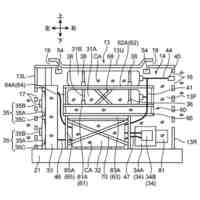
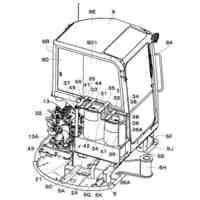
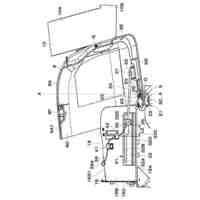
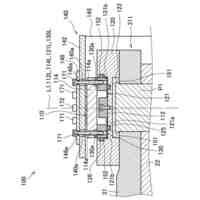
図3は、旋回フレームの斜視図であり、車体傾斜角度センサの取付位置について示す。
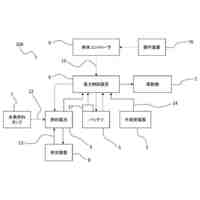
図4は、車体コントローラの機能ブロック図である。
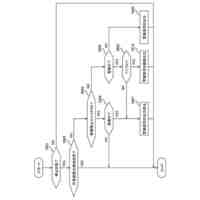
図5は、車体コントローラにより実行される処理の流れの一例を示すフローチャートである。
図6は、油圧ショベルの動作状態の時間変化の一例について示す図である。
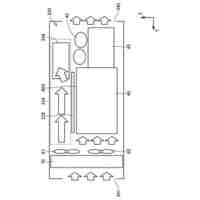
図7は、表示装置の表示画面に表示される表示画像の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態に係る作業機械について図面を用いて説明する。なお、以下では、作業機械が、作業装置の先端の作業具(アタッチメント)としてバケット10を備える油圧ショベルである例について説明する。
【0010】
<第1実施形態>
-油圧ショベルの全体構成-
図1は、本発明の第1実施形態に係る油圧ショベル1の構成図である。図1に示すように、油圧ショベル1は、車体(機体)1Bと、車体1Bに取り付けられる多関節型のフロント作業装置(以下、単に作業装置と記す)1Aと、を備える。車体1Bは、左右の走行油圧モータ(油圧アクチュエータ)3a,3bにより走行する下部走行体11と、下部走行体11に旋回輪17を介して旋回可能に設けられる上部旋回体12と、を有する。上部旋回体12は、旋回油圧モータ(油圧アクチュエータ)4により旋回する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
ダンプトラック
今日
日立建機株式会社
電動式作業車両
今日
日立建機株式会社
ホイールローダ
1日前
日立建機株式会社
作業機械の遠隔操作装置
1日前
個人
既設杭引抜装置
14日前
コベルコ建機株式会社
作業機械
2日前
コベルコ建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
2日前
松井金網工業株式会社
ふとん籠
10日前
合同会社ハイドロパワー
取水装置
1日前
住友重機械工業株式会社
作業機械
1日前
住友重機械工業株式会社
作業機械
8日前
住友重機械工業株式会社
作業機械
17日前
日立建機株式会社
電動式建設機械
17日前
有限会社Kunioka-ele
ホール用仮設蓋
21日前
日立建機株式会社
建設機械
14日前
コベルコ建機株式会社
作業システム
18日前
コベルコ建機株式会社
作業システム
16日前
株式会社小松製作所
作業機械
18日前
日立建機株式会社
作業機械の報知システム
3日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
3日前
日立建機株式会社
作業機械
3日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
建設機械
2日前
日立建機株式会社
作業機械
2日前
住友重機械工業株式会社
作業現場監視システム
今日
株式会社インバックス
ソイルセメントの製造方法
14日前
日立建機株式会社
作業機械及び遠隔制御装置
8日前
株式会社日立建機ティエラ
建設機械
今日
株式会社日立建機ティエラ
建設機械
14日前
株式会社日立建機ティエラ
建設機械
14日前
日立建機株式会社
角度検出装置
11日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ