TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024124210
公報種別
公開特許公報(A)
公開日
2024-09-12
出願番号
2023032217
出願日
2023-03-02
発明の名称
ミシン及びミシンを制御する方法
出願人
株式会社ジャノメ
代理人
弁理士法人瑛彩知的財産事務所
主分類
D05B
19/14 20060101AFI20240905BHJP(縫製;刺しゅう;タフティング)
要約
【課題】本発明は、さまざまな入力情報に基づくミシンの柔軟な制御を行う仕組みを提供する。
【解決手段】ミシンは、被縫製物の移動を検知する移動検知センサ6からの情報と所定の縫いピッチ量とに基づいて回転速度指示値を決定するように構成された回転速度決定ユニット113と、上限回転速度値を設定するように構成された上限回転速度設定ユニット112と、前記回転速度指示値に回転速度を制御し、前記回転速度指示値が前記上限回転速度値に達する場合は前記上限回転速度値に前記回転速度を制御するように構成された回転速度制御ユニット114と、制御された前記回転速度により針を動作させるミシンモータ2と、を含む。被縫製物の移動量に応じたミシンモータ2の回転速度制御が実行されるが、その回転速度は上限回転速度を越えないように制御される。
【選択図】図3
特許請求の範囲
【請求項1】
ミシンであって、
被縫製物の移動を検知する移動検知センサからの情報と所定の縫いピッチ量とに基づいて回転速度指示値を決定するように構成された回転速度決定ユニットと、
上限回転速度値を設定するように構成された上限回転速度設定ユニットと、
前記回転速度指示値に回転速度を制御し、前記回転速度指示値が前記上限回転速度値に達する場合は前記上限回転速度値に前記回転速度を制御するように構成された回転速度制御ユニットと、
制御された前記回転速度により針を動作させるミシンモータと、
を含む、ミシン。
続きを表示(約 1,300 文字)
【請求項2】
前記上限回転速度設定ユニットは、少なくともスピードコントローラの出力に基づいて前記上限回転速度値を設定するように構成される、請求項1に記載のミシン。
【請求項3】
前記上限回転速度設定ユニットは、少なくともフットコントローラの出力に基づいて前記上限回転速度値を設定するように構成される、請求項1に記載のミシン。
【請求項4】
前記上限回転速度設定ユニットは、スピードコントローラの出力に基づいて第1の上限回転速度値を設定すると共にフットコントローラの出力に基づいて第2の上限回転速度値を設定するように構成され、
前記回転速度制御ユニットは、前記第1の上限回転速度値よりも前記第2の上限回転速度値が低い場合に前記第2の上限回転速度値を前記上限回転速度値に使用するように構成される、請求項1に記載のミシン。
【請求項5】
前記上限回転速度設定ユニットは、スピードコントローラの出力に基づいて第1の上限回転速度値を算出すると共にフットコントローラの出力に基づいて第2の上限回転速度値を算出し、前記第1の上限回転速度値と前記第2の上限回転速度値とを比較して低い方の値を前記上限回転速度値に設定するように構成される、請求項1に記載のミシン。
【請求項6】
最低回転速度値を設定するように構成された最低回転速度設定ユニットをさらに含み、
前記回転速度制御ユニットは、前記回転速度指示値が前記最低回転速度値を上回るまでは前記最低回転速度値に前記回転速度を制御し、前記回転速度指示値が前記最低回転速度値を上回ると前記回転速度指示値に前記回転速度を制御するように構成される、請求項1~5のいずれか1項に記載のミシン。
【請求項7】
前記移動検知センサとしてイメージセンサが使用され、該イメージセンサにより被縫製物を撮像して得られるイメージデータを画像処理することにより、該被縫製物の移動に関する前記情報を取得する、請求項1に記載のミシン。
【請求項8】
針を動作させるミシンモータと、該ミシンモータを制御するプロセッサと、を含むミシンを制御する方法であって、
前記プロセッサにより、
被縫製物の移動を検知する移動検知センサからの情報と所定の縫いピッチ量とに基づいて回転速度指示値を決定し、
上限回転速度値を設定し、
前記回転速度指示値に前記回転速度を制御し、前記回転速度指示値が前記上限回転速度値に達する場合は前記上限回転速度値に前記回転速度を制御し、
制御された前記回転速度により前記ミシンモータを駆動する、
ことを含む、方法。
【請求項9】
前記上限回転速度値は、少なくともスピードコントローラの出力に基づいて設定する、請求項8に記載の方法。
【請求項10】
前記上限回転速度値は、少なくともフットコントローラの出力に基づいて設定する、請求項8に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ミシン及びミシンを制御する方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
例えば特許文献1に開示されるように、センサによって被縫製物の移動を監視し、その移動量に応じて、針を動作させるミシンモータの回転速度を制御することにより、縫いピッチを一定に保つように構成されるミシンがある。
【先行技術文献】
【特許文献】
【0003】
特開2018-110608
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のミシンは、センサの検知信号に基づいて算出される被縫製物の移動量を唯一のパラメータとしてミシンモータの回転速度を制御している。
しかしながら、本特許文献1では、さまざまな入力情報に基づくミシンの柔軟な制御について検討がなされていない。
そこで、本発明は、さまざまな入力情報に基づくミシンの柔軟な制御を行う仕組みを提供する。
【課題を解決するための手段】
【0005】
上記課題を解決するために、例えば特許請求の範囲に記載の構成を採用する。
本願は、上記課題を解決する構成や方法を複数含んでいるが、その一例を挙げるならば、ミシンに関する。このミシンは、被縫製物の移動を検知する移動検知センサからの情報と所定の縫いピッチ量とに基づいて回転速度指示値を決定するように構成された回転速度決定ユニットと、上限回転速度値を設定するように構成された上限回転速度設定ユニットと、回転速度指示値に回転速度を制御し、回転速度指示値が上限回転速度値に達する場合は上限回転速度値に回転速度を制御するように構成された回転速度制御ユニットと、制御された回転速度により針を動作させるミシンモータと、を含む。
【発明の効果】
【0006】
本発明によれば、さまざまな入力情報に基づくミシンの柔軟な制御を行う仕組みを提供することができる。
本発明のその他の態様については、以下に述べる発明を実施する形態の説明の中で開示される。
【図面の簡単な説明】
【0007】
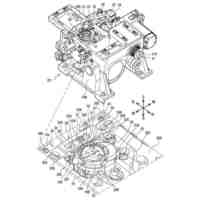
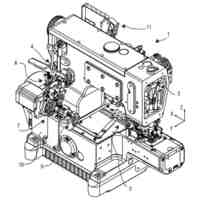
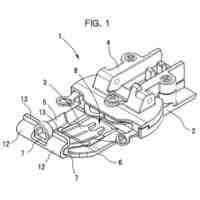
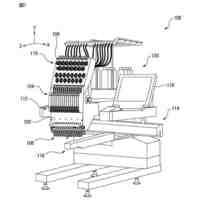
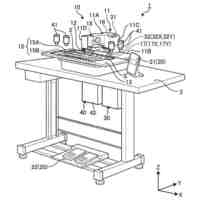
ミシンの実施例を示した図の例である。
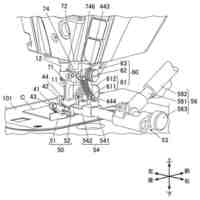
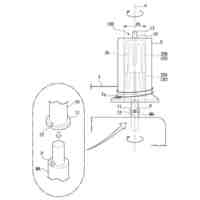
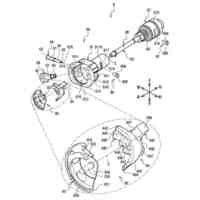
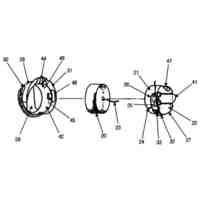
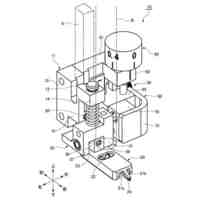
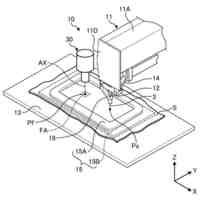
図1に例示したミシンにおける移動検知センサの部分を拡大し一部断面にして示す図の例である。
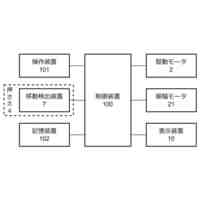
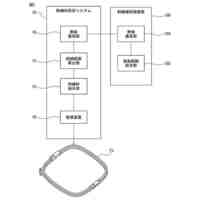
ミシンモータを駆動するプロセッサの実施例を示したブロック図の例である。
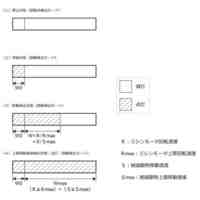
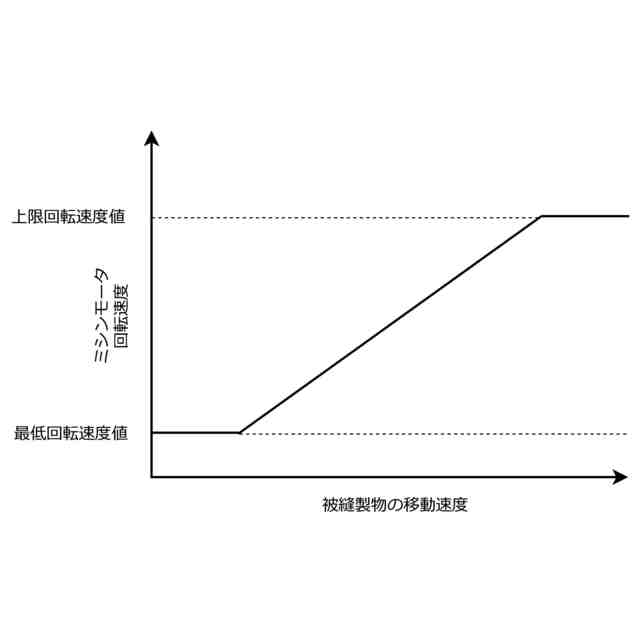
被縫製物の移動速度に対するミシンモータの回転速度を例示した制御チャートの例である。
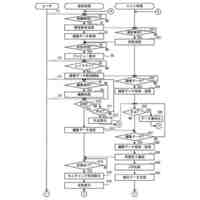
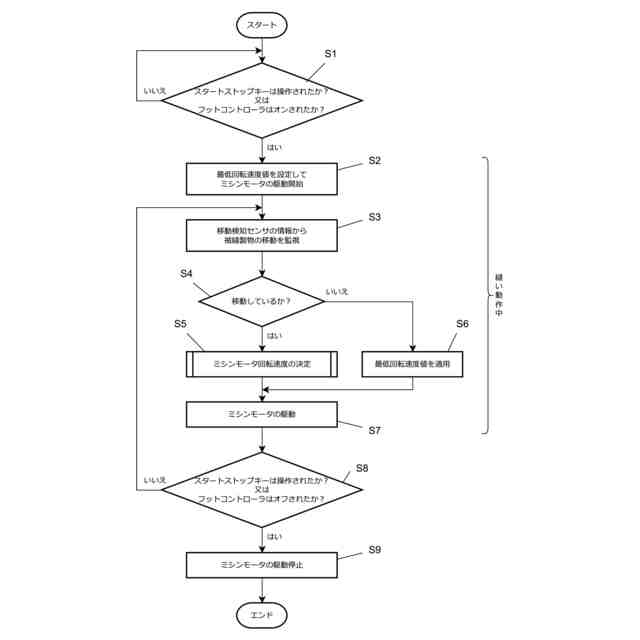
プロセッサにより実行される縫い動作開始-停止制御の実施例を示すフローチャートの例である。
プロセッサによって縫い動作中に実行される回転速度制御の実施例1を示すフローチャートの例である。
プロセッサによって縫い動作中に実行される回転速度制御の実施例2を示すフローチャートの例である。
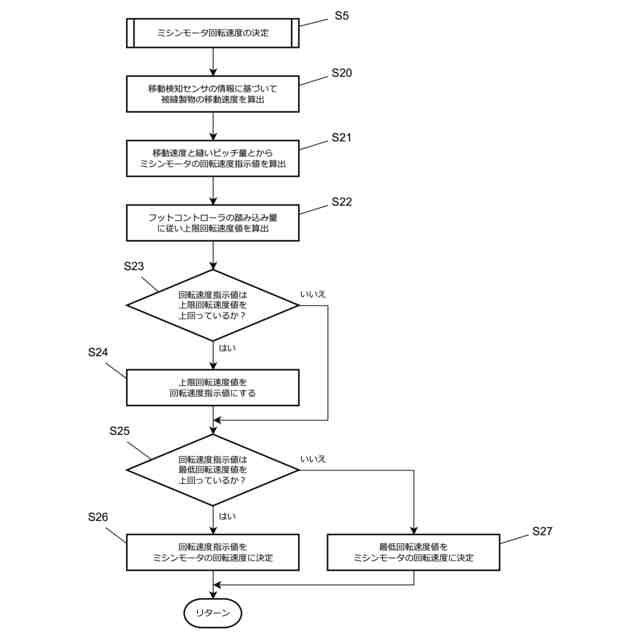
プロセッサによって縫い動作中に実行される回転速度制御の実施例3を示すフローチャートの例である。
プロセッサによって縫い動作中に実行される回転速度制御の実施例4を示すフローチャートの例である。
【発明を実施するための形態】
【0008】
以下、本発明を実施する形態に関し、具体的な実施例を例示して説明する。
【0009】
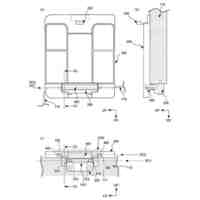
図1は、ミシンの実施例を示している。ミシン1は、ミシンモータ2から周知のリンク機構を介して針3を動作させ、押さえ4により押さえた被縫製物(図示せず)が使用者により移動させられるとこれに同調して縫い動作を実行する。縫い動作により上糸と下糸と(図示せず)を交差させて被縫製物に縫い目を形成する。縫いピッチとは縫い目と縫い目との間隔のことである。押さえ4は、針3の動作に合わせて上下動可能な押さえ棒5に取り付けられている。この押さえ4に、図2に示すとおり、移動検知センサ6が組み込まれている。移動検知センサ6は、例えばイメージセンサを使用して構成されており、イメージセンサにより被縫製物の表面を撮像して得られるイメージデータを画像処理することにより、被縫製物の移動に関する情報を取得する。他にも、移動検知センサ6として光学式センサを使用することもでき、光学式センサは、可視光線や赤外線などを使用して被縫製物の表面形状を読み取り、被縫製物の移動量を検知する。
【0010】
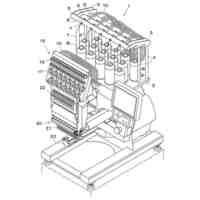
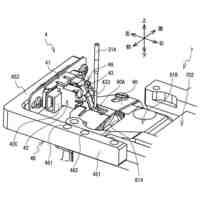
また、ミシン1は、使用者から操作し易い位置に、スタートストップキー7、スピードコントローラ8、タッチパネル式のディスプレイ9を備えている。スタートストップキー7は縫い動作の開始/停止操作を行うためのもので、本例では押しボタンとして構成されている。スピードコントローラ8は、本例ではスライドつまみで、使用者がつまみを左右にスライドさせた位置に応じて出力が変化するアナログデバイスである。一例としてスライドつまみを示しているが、回転つまみなどとしてもよい。また、入力をデジタル信号で処理するデジタルデバイスで実装してもよい。一例として液晶パネルで実装されるディスプレイ9は、ミシン1の機能や動作状態を表示し、また、設定画面などで各種パラメータをタッチ入力するために使用される。特に、本例の場合、使用者は、設定画面を表示したディスプレイ9の所定領域をタッチすることで縫いピッチの設定入力を行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ジャノメ
ミシン
21日前
ブラザー工業株式会社
ミシン
3日前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
4か月前
JUKI株式会社
ミシン
3か月前
JUKI株式会社
ミシン
3か月前
ブラザー工業株式会社
ミシン
4か月前
ブラザー工業株式会社
ミシン
3か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
2か月前
ブラザー工業株式会社
縫製装置
3か月前
株式会社エスポアール
縫製装置
1か月前
株式会社ジャノメ
ミシン用補助テーブル
2か月前
株式会社バルダン
刺繍ミシンの糸道装置
2か月前
個人
改良版3Dクイック・ソーイング・システム
2か月前
JUKI株式会社
ミシン釜の給油装置
3か月前
JUKIプロサーブ株式会社
糸巻具及び糸巻方法
1か月前
株式会社PEGASUS
偏平縫いミシンの下糸切り装置
4か月前
ブラザー工業株式会社
ミシン及び調整方法
1か月前
JUKI株式会社
ミシン
2か月前
株式会社ジャノメ
ミシン
21日前
株式会社ジャノメ
ミシン
2か月前
株式会社PEGASUS
オーバーロックミシンのカッター装置
4か月前
個人
本縫いミシンの下糸供給方法と下糸、下糸ケース、内釜の構造
2か月前
株式会社鈴木製作所
ミシン用布押え部材
2か月前
個人
上糸蓄糸‐繰り出し装置を含む上糸制御機構を有する本縫いミシン
2か月前
ブラザー工業株式会社
ミシン、調整方法、及びセンサユニット
1か月前
JUKI株式会社
縫製システム及び縫製方法
24日前
株式会社ジャノメ
ミシン用押さえホルダ及びミシン
3か月前
株式会社ハッピージャパン
刺繍枠設定システム
24日前
YKK株式会社
ミシンフット、及びそれを備えたミシン
4か月前
株式会社ハッピージャパン
刺繍糸の色彩設定システム
26日前
ブラザー工業株式会社
縫製システム、モニタリングプログラム、及びミシン
2か月前
ブラザー工業株式会社
縫製システム、縫製データ送信プログラム、及びミシン
4か月前
JUKI株式会社
画像処理装置、ミシン、及び画像処理方法
24日前
JUKI株式会社
画像処理装置、ミシン、画像処理方法、及び縫製補正方法
21日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ