TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024165045
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023080865
出願日
2023-05-16
発明の名称
ミシン
出願人
株式会社ジャノメ
代理人
弁理士法人瑛彩知的財産事務所
主分類
D05B
19/14 20060101AFI20241121BHJP(縫製;刺しゅう;タフティング)
要約
【課題】従来のミシンは、今動かしている被縫製物の縫製速度がどの程度であるか、使用者が把握することができるようにはなっていない。
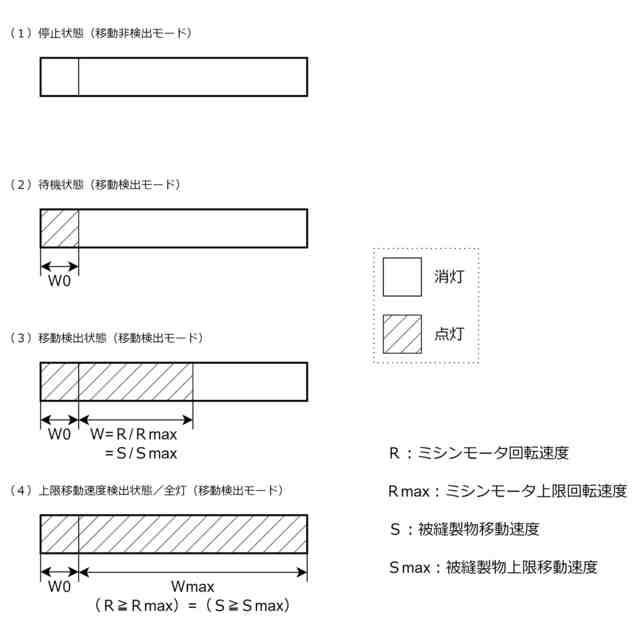
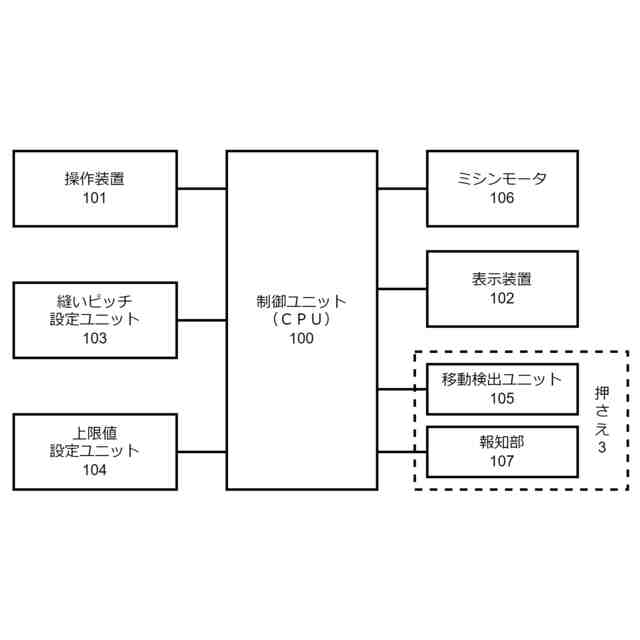
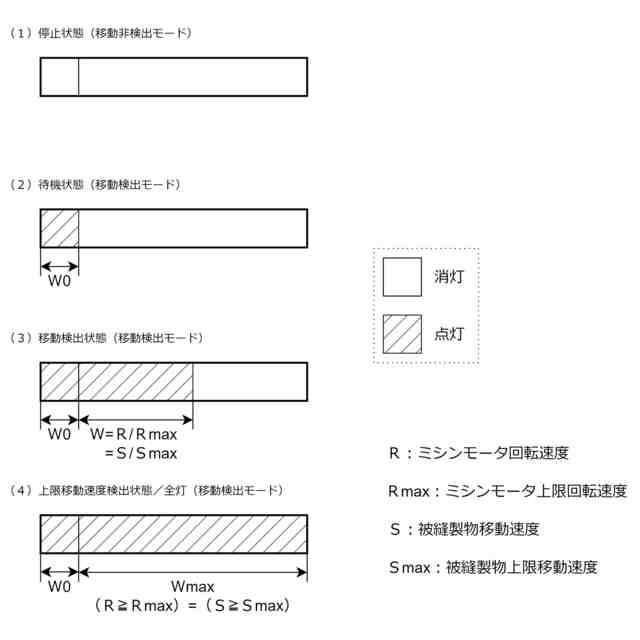
【解決手段】ミシンであって、所定の縫いピッチを設定するように構成された縫いピッチ設定ユニットと 、被縫製物の移動を検出するように構成された移動検出ユニットと、移動検出ユニットにより検出される被縫製物の移動量に基づいて被縫製物の移動速度を算出し、この移動速度と所定の縫いピッチとに基づいて、針を動作させるミシンモータの回転速度Rを算出するように構成された制御ユニットと、ミシンモータの上限回転速度Rmaxに対する回転速度Rの大きさを知らせるように構成された報知部と、を有する。
【選択図】図4
特許請求の範囲
【請求項1】
ミシンであって、
所定の縫いピッチを設定するように構成された縫いピッチ設定ユニットと、
被縫製物の移動を検出するように構成された移動検出ユニットと、
前記移動検出ユニットにより検出される被縫製物の移動量に基づいて該被縫製物の移動速度を算出し、該移動速度と前記所定の縫いピッチとに基づいて、針を動作させるミシンモータの回転速度を算出するように構成された制御ユニットと、
前記ミシンモータの上限回転速度に対する前記回転速度の大きさを知らせるように構成された報知部と、を有する、ミシン。
続きを表示(約 710 文字)
【請求項2】
前記報知部は、表示の変化又は音の変化で知らせるように構成される、請求項1に記載のミシン。
【請求項3】
前記上限回転速度を設定する上限値設定ユニットをさらに有する、請求項1に記載のミシン。
【請求項4】
前記報知部は、算出された前記回転速度が前記上限回転速度を超えた場合に、前記回転速度が前記上限回転速度を超えたことを示す情報を表示する、又は、音により報知する、請求項1~3のいずれか1項に記載のミシン。
【請求項5】
前記制御ユニットは、算出された前記回転速度が前記上限回転速度を超えた場合に前記ミシンモータを停止させるように構成される、請求項1~3のいずれか1項に記載のミシン。
【請求項6】
前記制御ユニットは、算出された前記回転速度が前記上限回転速度を超えた場合に、前記上限回転速度で前記ミシンモータを制御するように構成される、請求項1~3のいずれか1項に記載のミシン。
【請求項7】
針を動作させるミシンモータと、被縫製物の移動を検出する移動検出ユニットと、前記ミシンモータを制御する制御ユニットと、を含むミシンを制御するためのプログラムであって、
当該プログラムを実行する前記制御ユニットが、
前記移動検出ユニットにより検出される被縫製物の移動量に基づいて該被縫製物の移動速度を算出し、該移動速度と所定の縫いピッチとに基づいて、前記ミシンモータの回転速度を算出し、
前記ミシンモータの上限回転速度に対する前記回転速度の大きさを報知部により報知させる、ように作動する、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ミシンに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
ミシンに設けられている自動送り機構により被縫製物を送って縫製を行うのではなく、使用者が自由に被縫製物を移動させて縫製を行う、フリーモーションとも呼ばれる縫製方法を実施できるミシンが知られている。このミシンは、使用者により動かされる被縫製物の移動を検出し、その移動速度に応じた縫製速度(針を動作させるミシンモータの回転速度)の制御を実行することにより、所定の縫いピッチで縫製できるように構成されている。
【0003】
そして、例えば特許文献1に開示されるように、被縫製物の移動を検出する装置の検出周期を、単位時間当たりの被縫製物の移動量に応じて変化させることで、ノイズの影響を低減して移動検出精度の向上を図ったミシンも提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2018-110608
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1などのフリーモーション縫製技術では、使用者があまりに速く被縫製物を動かしてしまうと、たとえ検出周期を調節したとしても、縫製速度の追従制御が追い付かず、設定された縫いピッチで縫製できずに縫いピッチが乱れることがある。つまり、追従可能な被縫製物の移動速度には上限がある。このため、被縫製物は上限移動速度以下の移動速度で動かす必要があるが、従来のミシンでは、今動かしている被縫製物について縫製速度がどの程度であるか、使用者が把握することができるようにはなっていない。
【課題を解決するための手段】
【0006】
上記課題を解決するために、例えば特許請求の範囲に記載の構成を採用する。
本願は、上記課題を解決する構成や方法を複数含んでいるが、その一例をあげるならば、ミシンに関する。このミシンは、所定の縫いピッチを設定するように構成された縫いピッチ設定ユニットと、被縫製物の移動を検出するように構成された移動検出ユニットと、移動検出ユニットにより検出される被縫製物の移動量に基づいて被縫製物の移動速度を算出し、この移動速度と所定の縫いピッチとに基づいて、針を動作させるミシンモータの回転速度を算出するように構成された制御ユニットと、ミシンモータの上限回転速度に対する回転速度の大きさを知らせるように構成された報知部と、を有する。
【発明の効果】
【0007】
上記のミシンによると、使用者は、今の縫製速度を視覚的に把握することができる。
本発明のその他の態様については、以下に述べる発明を実施する形態の説明の中で開示される。
【図面の簡単な説明】
【0008】
ミシンの実施例を示した図の例である。
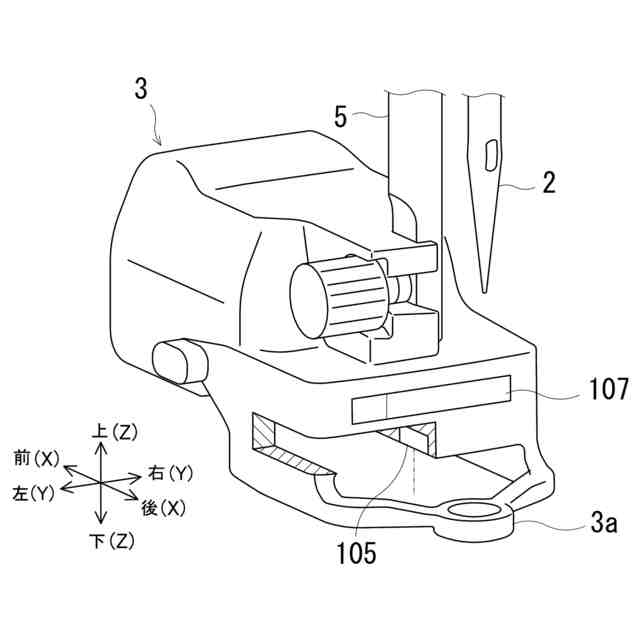
図1に例示したミシンにおける押さえの部分を拡大し一部断面にして示す図の例である。
制御ユニットの実施例を示したブロック図の例である。
報知部の実施例を示した図の例である。
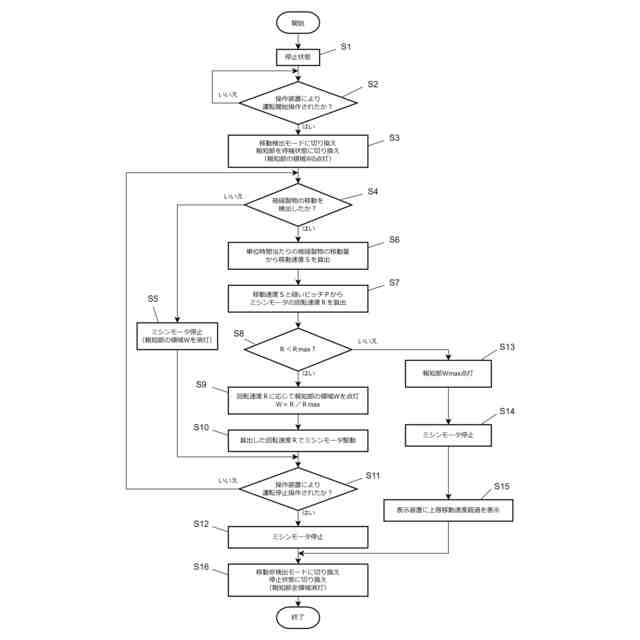
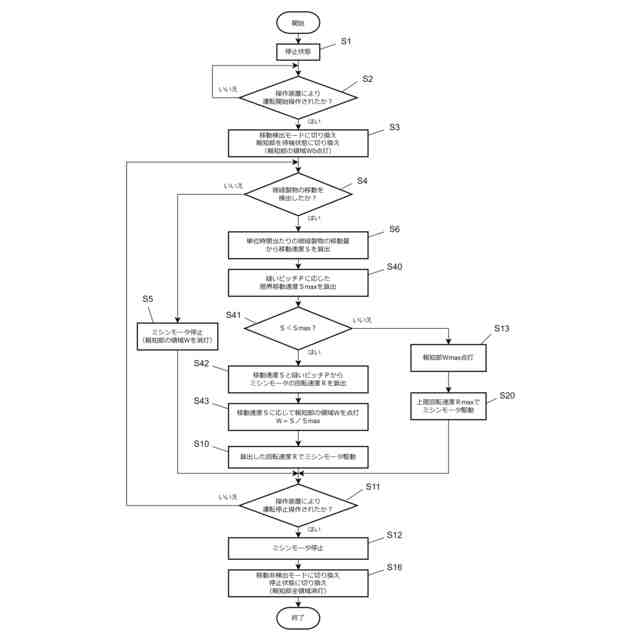
制御ユニットにより実行される制御の実施例1を示すフローチャートの例である。
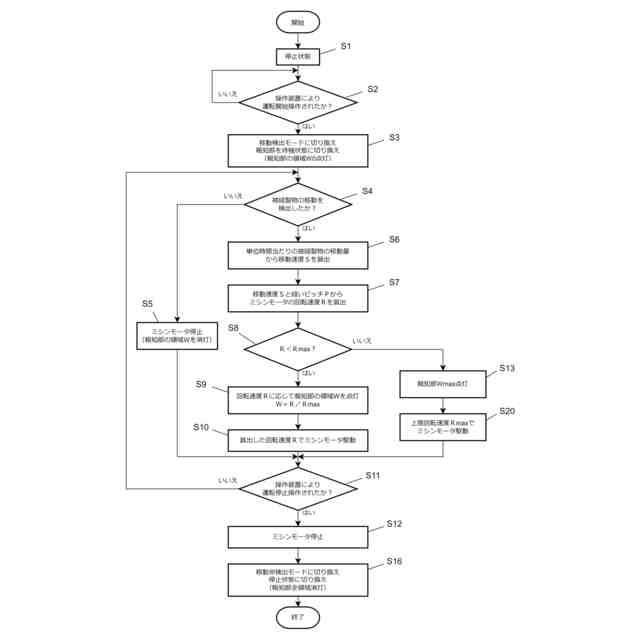
制御ユニットにより実行される制御の実施例2を示すフローチャートの例である。
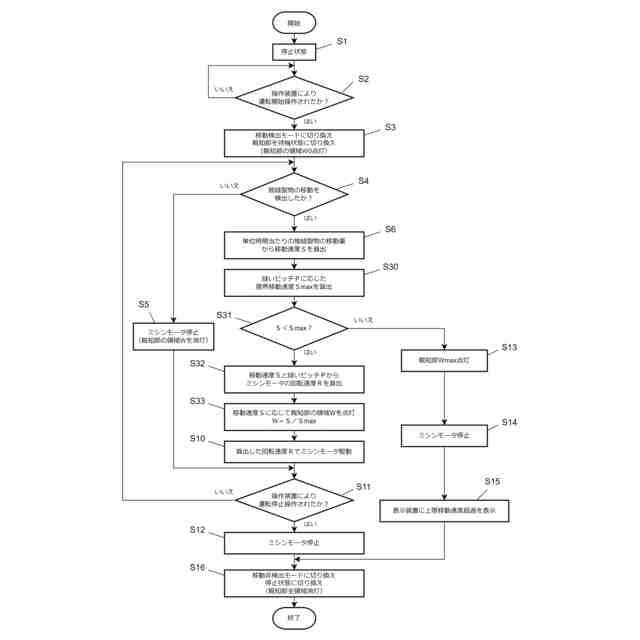
制御ユニットにより実行される制御の実施例3を示すフローチャートの例である。
制御ユニットにより実行される制御の実施例4を示すフローチャートの例である。
【発明を実施するための形態】
【0009】
以下、本発明を実施する形態に関し、具体的な実施例を例示して説明する。
【0010】
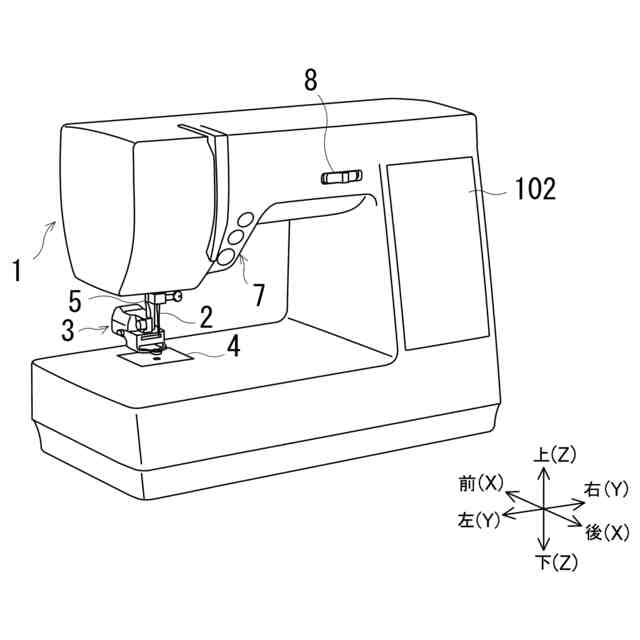
図1は、ミシンの実施例を示している。ミシン1は、内蔵されたミシンモータ(図示せず)から周知のリンク機構を介して針2を動作させ、押さえ3により押さえた被縫製物(図示せず)が使用者により移動させられるとこれに同調して縫い動作を実行する(フリーモーション縫い)。縫い動作により上糸と下糸と(図示せず)を交差させて被縫製物に縫い目を形成する。上糸は糸コマ(図示せず)から提供され針2に通される。下糸はボビン(図示せず)に収納されてミシン1の内部に収容される。被縫製物(例えば布)は、押さえ3と針板4とにより挟持される。ミシンモータの働きにより針2が下降し、被縫製物を貫通してボビンに近接する。釜(図示せず)の働きにより上糸と下糸とが交差し、針2が上昇して被縫製物から抜けると縫い目が形成される。フリーモーションではない、通常縫いの場合は、自動送り機構(図示せず)の働きにより被縫製物が自動的に所定量前方へ送られ、同様にして次の縫い目が形成される。この動作の繰り返しにより、所定間隔で縫い目のある直線状の連続した縫製パターンが被縫製物に施される。縫いピッチとはその縫い目と縫い目との間隔のことである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ