TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024145430
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023057774
出願日
2023-03-31
発明の名称
ミシン
出願人
JUKI株式会社
代理人
個人
,
個人
主分類
D05B
27/12 20060101AFI20241004BHJP(縫製;刺しゅう;タフティング)
要約
【課題】被縫製物の良好な送りを行う。
【解決手段】ミシン100は、下送りモータ24,25により針板101の下側から搬送ベルト21~24により被縫製物を送る下送り機構20と、ミシンモータ16により縫い針11を保持する針棒12を上下動させる針上下動機構80と、ミシンモータ16により縫い針11を保持する針棒12を被縫製物の送り方向に沿って揺動させる針送り機構50と、下送りモータ24,25を制御して、針棒12の揺動による縫い針11の被縫製物の送り方向に沿った送り量に合わせて搬送ベルト21~24を送る制御装置90とを備えている。
【選択図】図14
特許請求の範囲
【請求項1】
下送りモータにより針板の下側から搬送ベルトにより被縫製物を送る下送り機構と、
ミシンモータにより縫い針を保持する針棒を上下動させる針上下動機構と、
前記ミシンモータにより前記縫い針を保持する針棒を前記被縫製物の送り方向に沿って揺動させる針送り機構と、
前記下送りモータを制御して、前記針棒の揺動による前記縫い針の前記被縫製物の送り方向に沿った送り量に合わせて前記搬送ベルトを送る制御装置と、
を備えることを特徴とするミシン。
続きを表示(約 340 文字)
【請求項2】
前記制御装置は、前記下送りモータを制御して、前記縫い針の正弦波曲線に沿った送り量の変化に合わせて前記被縫製物を送ることを特徴とする請求項1に記載のミシン。
【請求項3】
前記針棒の揺動による前記縫い針の前記被縫製物の送り方向に沿った送り量とは、前記針板の上面の高さでの送り量であることを特徴とする請求項1に記載のミシン。
【請求項4】
前記針棒の揺動による前記縫い針の、前記被縫製物の送り方向に沿った、前記針板の上面の高さにおける位置を検出する検出装置を備え、
前記制御装置は、前記下送りモータを制御して、前記検出装置によって検出された前記縫い針の位置に合わせて前記被縫製物を搬送させることを特徴とする請求項3に記載のミシン。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ベルト送りと針送りを行うミシンに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
針板上の被縫製物を高い搬送力で送るために、揺動を行う縫い針を被縫製物に突き通しながら送りを行う針送りミシンがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-188825号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ベルトによる下送り機構を備えるミシンは、ベルトが被縫製物を傷付けない、送り速度を容易に変えることが出来る、機構の部品点数が少ない等の利点がある。
このため、針送りミシンでもベルト送りの下送り機構を搭載することが検討されている。
しかしながら、針送り機構は、上下動を行う針棒を揺動させる構成のため、被縫製物の送り速度が上軸角度ごとに変動するのに対して、ベルト送りの下送り機構は、送り速度が一定のため、互いの送り速度にズレが生じるという問題が想定される。
【0005】
本発明は、被縫製物を良好に送ることをその目的とする。
【課題を解決するための手段】
【0006】
本発明は、ミシンにおいて、
下送りモータにより針板の下側から搬送ベルトにより被縫製物を送る下送り機構と、
ミシンモータにより縫い針を保持する針棒を上下動させる針上下動機構と、
前記ミシンモータにより前記縫い針を保持する針棒を前記被縫製物の送り方向に沿って揺動させる針送り機構と、
前記下送りモータを制御して、前記針棒の揺動による前記縫い針の前記被縫製物の送り方向に沿った送り量に合わせて前記搬送ベルトを送る制御装置と、
を備えることを特徴とする。
【発明の効果】
【0007】
本発明のミシンは、上記構成により、被縫製物の良好な送りを行うことが可能となる。
【図面の簡単な説明】
【0008】
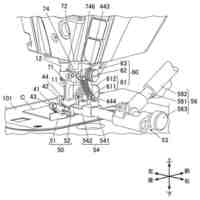
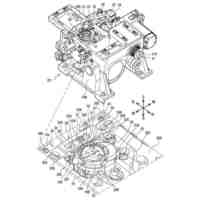
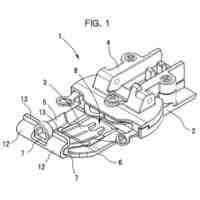
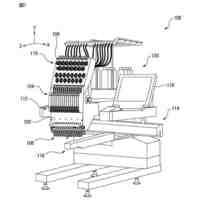
発明の実施形態であるミシンの後面図である。
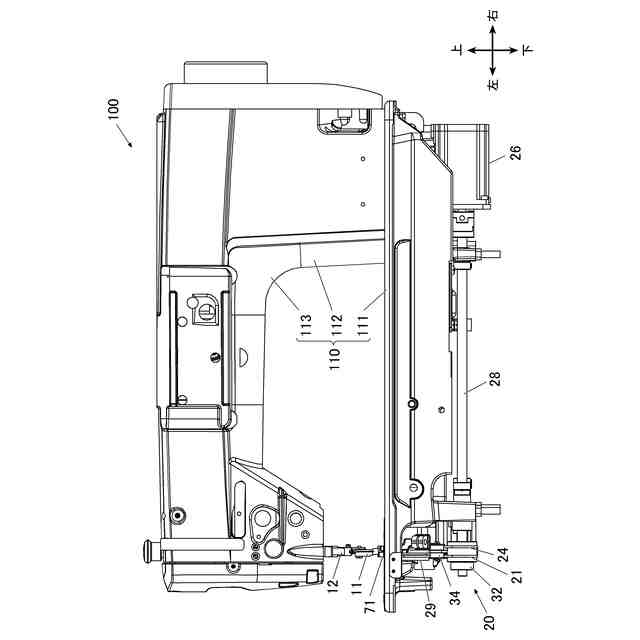
ミシンの左側面図である。
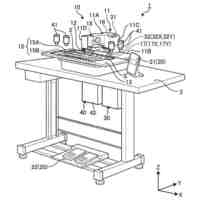
ミシンの斜視図である。
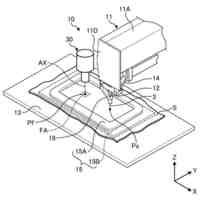
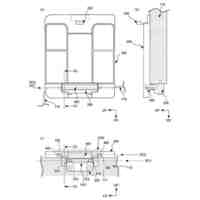
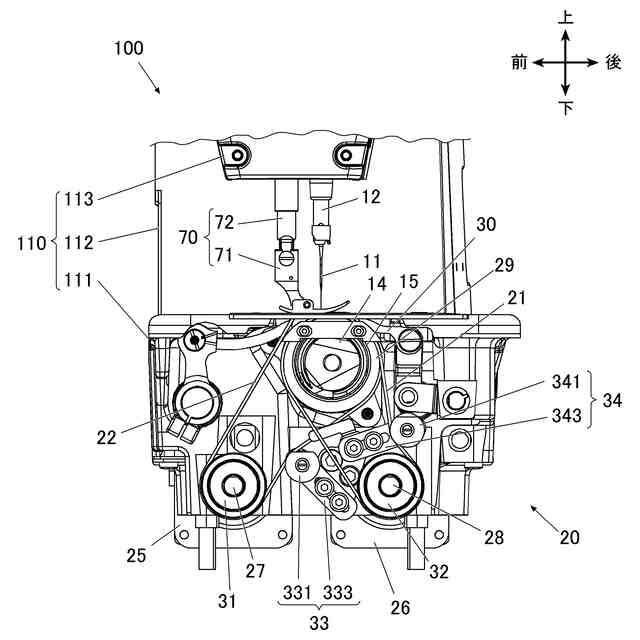
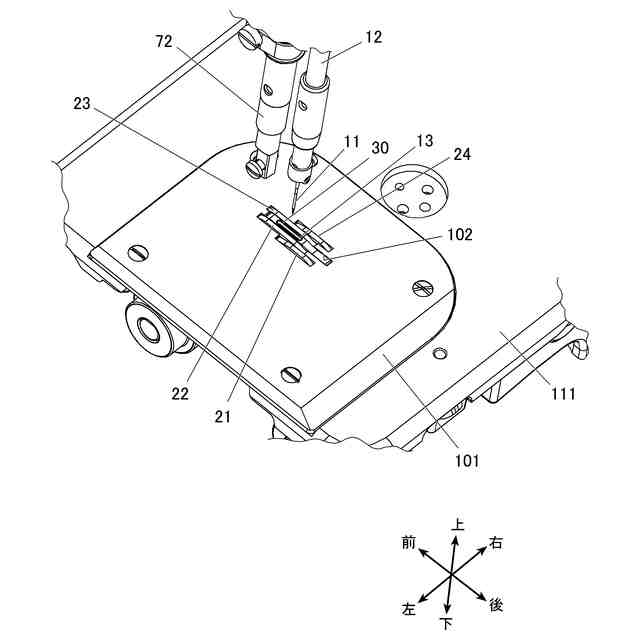
押さえ足の図示を省略したミシンベッド部の左端部上面を示す斜視図である。
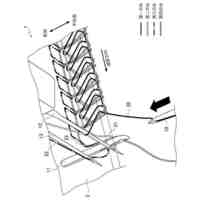
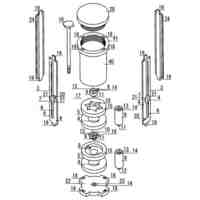
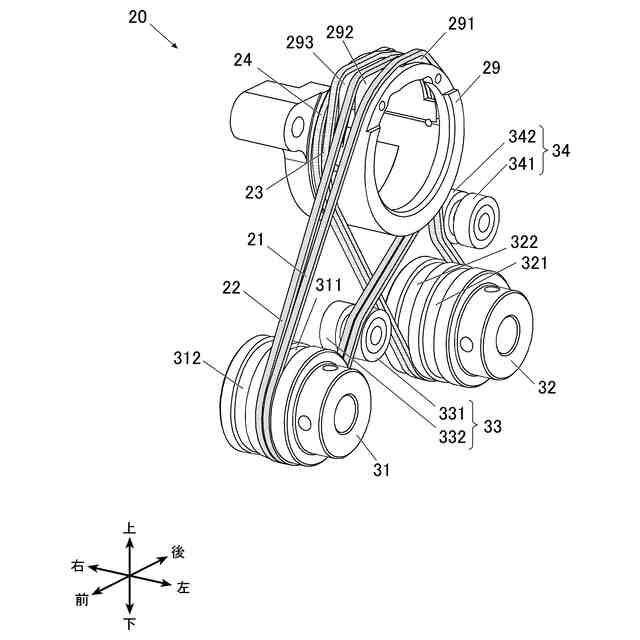
下送り機構のガイド枠の斜視図である。
四本の搬送ベルトが前後差動送り状態にある送り機構の斜視図である。
四本の搬送ベルトが左右差動送り状態にある送り機構の斜視図である。
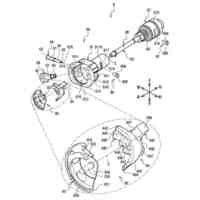
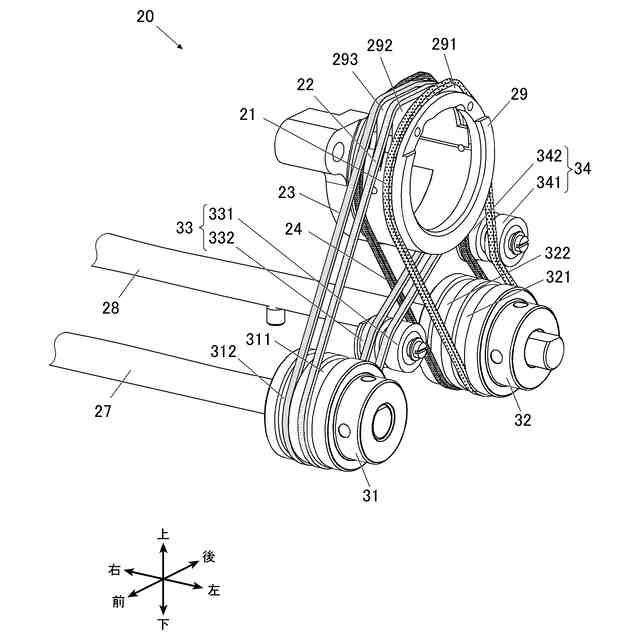
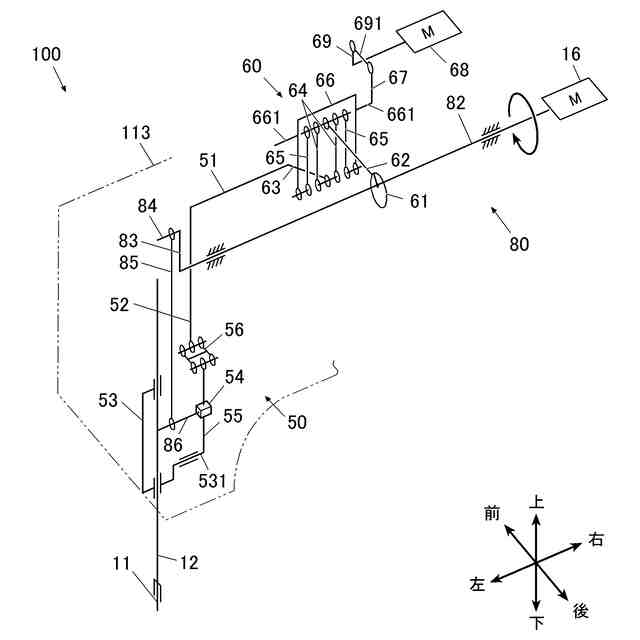
針上下動機構及び針送り機構の機構線図である。
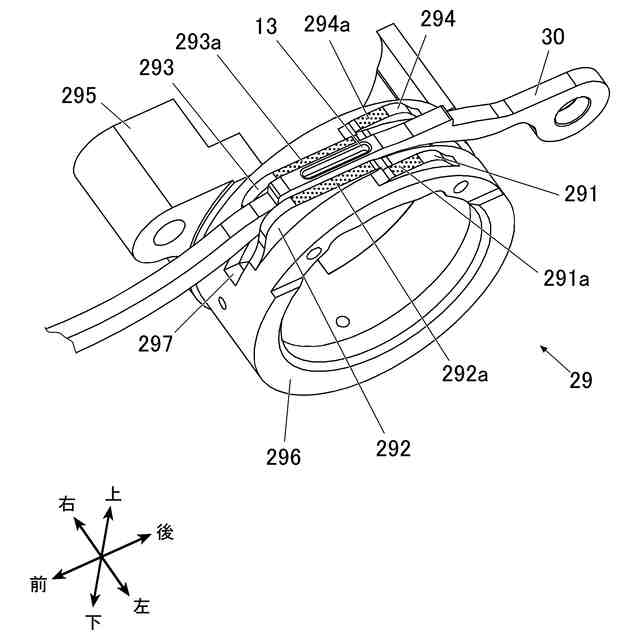
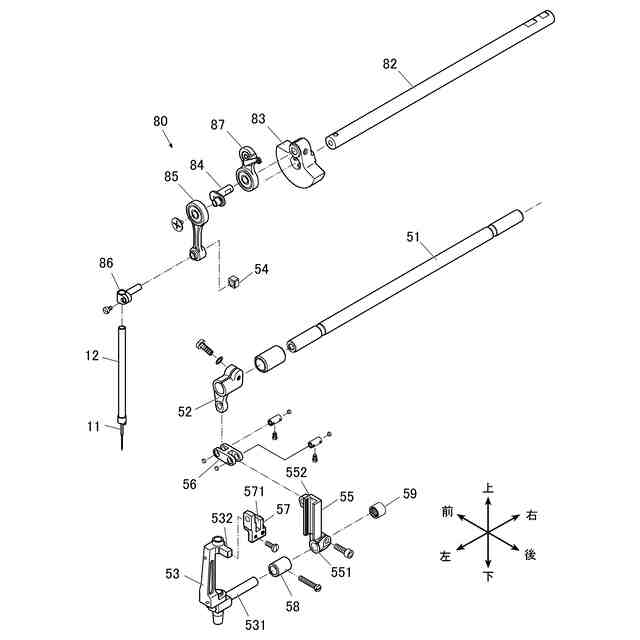
針上下動機構及び針送り機構の分解斜視図である。
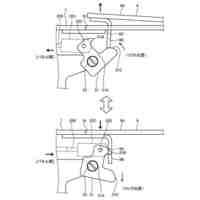
針送り調節機構の原理説明図である。
針送り調節機構の原理説明図である。
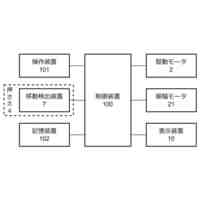
ミシンの制御系を示すブロック図である。
針送り機構によって送られる縫い針の前後方向の送り量と上軸の軸角度との関係を示す線図である。
ミシンの送りの動作制御を示すフローチャートである。
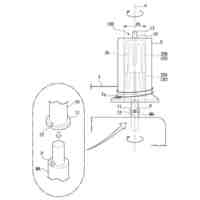
針板上の縫い針の位置を検出する検出装置を設けた例の平面図である。
【発明を実施するための形態】
【0009】
[実施形態の概略構成]
以下、本発明の実施形態であるミシンについて詳細に説明する。
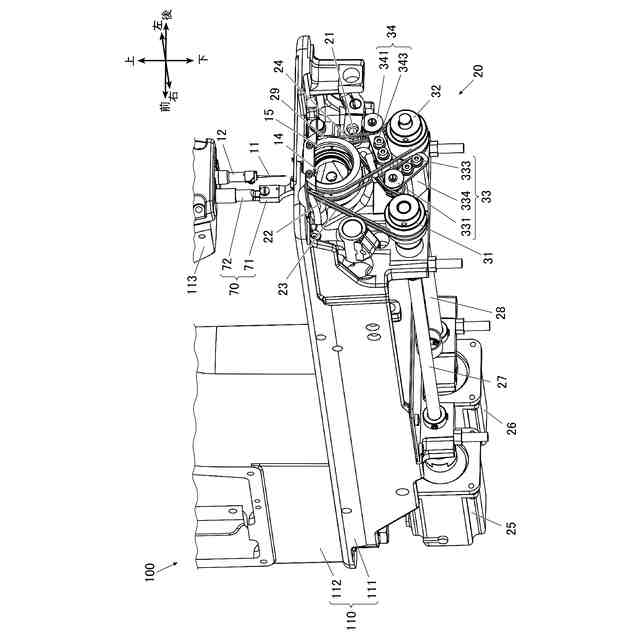
図1はミシン100の後面図、図2はミシン100の左側面図、図3はミシン100の斜視図を示す。
以下、被縫製物の送り方向下流側を「前」、送り方向上流側を「後」、前を向いた状態で左手側を「左」、右手側を「右」、鉛直上方を「上」、鉛直下方を「下」とする。前後方向、左右方向、上下方向は、互いに直交する。
以下の説明では、ミシン100は水平面に設置されている前提であり、前後方向と左右方向は、水平となる。
【0010】
本発明の実施形態であるミシン100として、いわゆる本縫いミシンを例示する。
ミシン100は、ミシンフレーム110、針上下動機構80、針送り機構50、下送り機構20、押さえ機構としての布押さえ機構70、釜機構、制御装置90と、を備えている。
針上下動機構80は、縫い針11を保持する針棒12に上下動動作を付与する。
針送り機構50は、縫い針11を保持する針棒12に被縫製物の送り方向に沿った揺動動作を付与する。
下送り機構20は、針板101上の被縫製物に下から前後方向に沿った送り動作を付与する。
布押さえ機構70は、針板101上の被縫製物に押さえ圧を付与する。
釜機構は、縫い針11から上糸のループを捕捉して下糸を絡め、縫い目を形成する。
制御装置90は、上記各構成の動作制御を実行する。
なお、上記ミシン100は、一般的な本縫いミシンが備える糸調子等の各構成を備えているが、これらは周知のものなので説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
部品実装システム
24日前
JUKI株式会社
縫製システム及び縫製方法
24日前
JUKI株式会社
ステージの回転中心測定方法
24日前
JUKI株式会社
部品実装装置及び部品実装方法
3か月前
JUKI株式会社
生地折り装置、及び生地折り方法
26日前
JUKI株式会社
部品実装システム及び部品実装方法
2か月前
JUKI株式会社
画像処理装置、ミシン、及び画像処理方法
24日前
JUKI株式会社
画像処理装置、ミシン、画像処理方法、及び縫製補正方法
21日前
ブラザー工業株式会社
ミシン
3日前
JUKI株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
2か月前
株式会社エスポアール
縫製装置
1か月前
株式会社ジャノメ
ミシン用補助テーブル
2か月前
株式会社バルダン
刺繍ミシンの糸道装置
2か月前
個人
改良版3Dクイック・ソーイング・システム
2か月前
ブラザー工業株式会社
ミシン及び調整方法
1か月前
JUKIプロサーブ株式会社
糸巻具及び糸巻方法
1か月前
株式会社ジャノメ
ミシン
21日前
JUKI株式会社
ミシン
2か月前
株式会社ジャノメ
ミシン
2か月前
個人
本縫いミシンの下糸供給方法と下糸、下糸ケース、内釜の構造
2か月前
個人
上糸蓄糸‐繰り出し装置を含む上糸制御機構を有する本縫いミシン
2か月前
株式会社鈴木製作所
ミシン用布押え部材
2か月前
ブラザー工業株式会社
ミシン、調整方法、及びセンサユニット
1か月前
JUKI株式会社
縫製システム及び縫製方法
24日前
株式会社ジャノメ
ミシン用押さえホルダ及びミシン
3か月前
株式会社ハッピージャパン
刺繍枠設定システム
24日前
株式会社ハッピージャパン
刺繍糸の色彩設定システム
26日前
ブラザー工業株式会社
縫製システム、モニタリングプログラム、及びミシン
2か月前
JUKI株式会社
画像処理装置、ミシン、及び画像処理方法
24日前
JUKI株式会社
画像処理装置、ミシン、画像処理方法、及び縫製補正方法
21日前
カイマブ・リミテッド
抗PD-L1抗体
2か月前
アローヘッド ファーマシューティカルズ インコーポレイテッド
B型肝炎ウイルス感染のためのRNAi薬
3か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ