TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024122566
公報種別
公開特許公報(A)
公開日
2024-09-09
出願番号
2023030167
出願日
2023-02-28
発明の名称
自律走行コンバイン
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
69/00 20060101AFI20240902BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】本発明は、エンジン制御を省エネモードにして最高回転数付近で使用している場合に、負荷の増大によってエンジン回転数が低下することが有っても省エネモードを解消すること無く、負荷の増大に耐えて走行或は作業が続行できるようにすること課題とする。
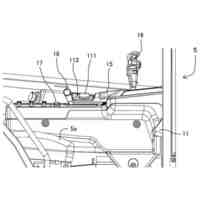
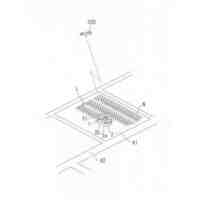
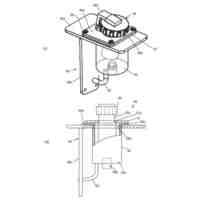
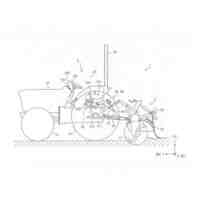
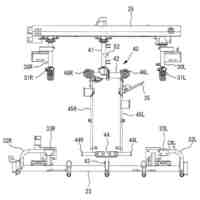
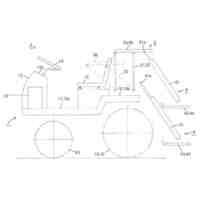
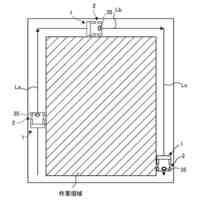
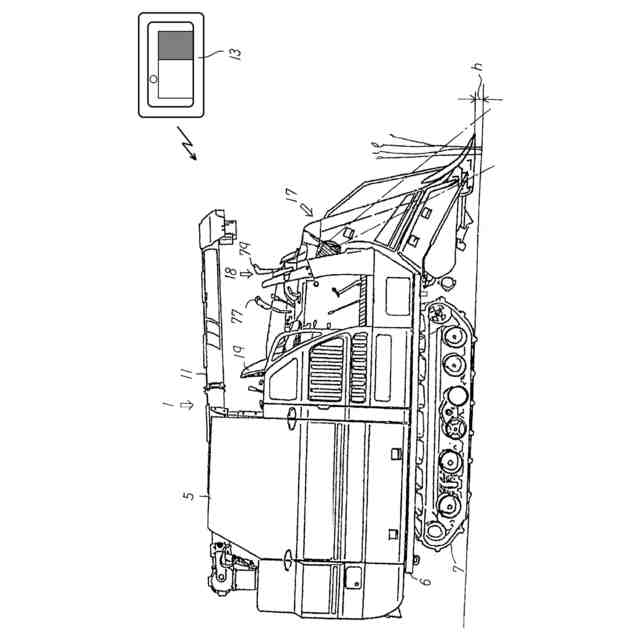
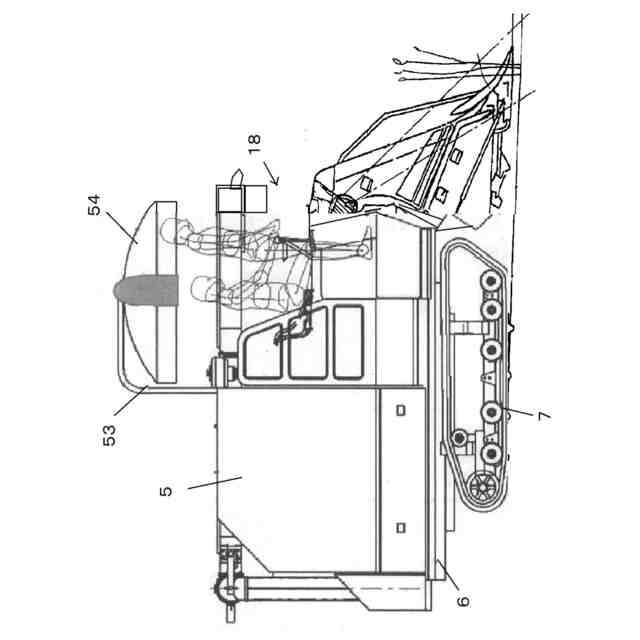
【解決手段】圃場の穀稈を刈り取る刈取装置17と刈取穀稈を脱穀する脱穀装置12と脱穀した穀粒を溜めるグレンタンク5及びグレンタンク5から穀粒を排出する排出オーガ11を備えた自律走行コンバインにおいて、グレンタンク5の穀粒貯留量センサ25と機体フレ-ム6の地図上位置を認識する測位装置21と運搬車10の位置認識装置14を設け、穀粒貯留量センサ25が満杯近くを検出すると機体フレ-ム6と運搬車10の地図上位置により、穀稈植生域60を避けた走行ルートRを算出して走行開始可能にすることを特徴とする自律走行コンバインとする。
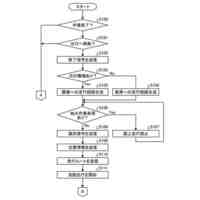
【選択図】図4
特許請求の範囲
【請求項1】
圃場の穀稈を刈り取る刈取装置(17)と刈取穀稈を脱穀する脱穀装置(12)と脱穀した穀粒を溜めるグレンタンク(5)及びグレンタンク(5)から穀粒を排出する排出オーガ(11)を備えた自律走行コンバインにおいて、グレンタンク(5)の穀粒貯留量センサ(25)と機体フレ-ム(6)の地図上位置を認識する測位装置(21)と運搬車(10)の位置認識装置(14)を設け、穀粒貯留量センサ(25)が満杯近くを検出すると機体フレ-ム(6)と運搬車(10)の地図上位置により、穀稈植生域(60)を避けた走行ルート(R)を算出して走行開始可能にすることを特徴とする自律走行コンバイン。
続きを表示(約 660 文字)
【請求項2】
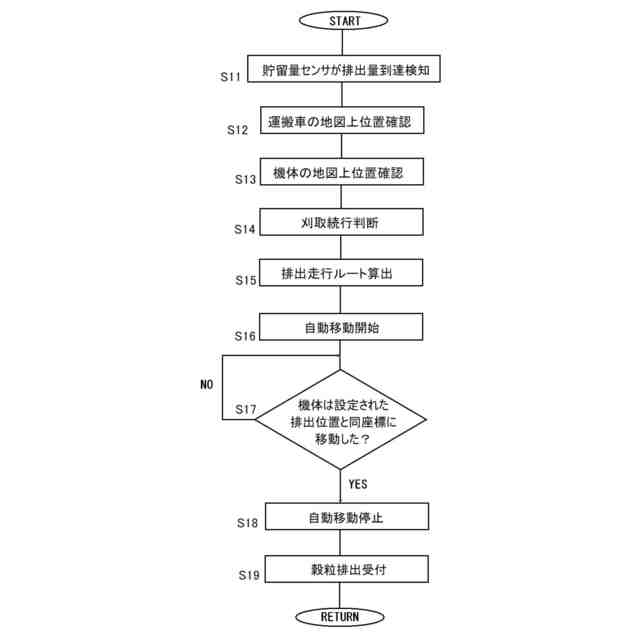
穀粒貯留量センサ(25)が所定の穀粒充満量を検出すると機体フレ-ム(6)の地図上位置を測位装置(21)で測定して登録した運搬車(10)の位置までの走行ルート(R)を算出して走行することを特徴とする請求項1に記載の自律走行コンバイン。
【請求項3】
直前の収穫走行による収穫率を算出し、穀稈植生域(60)の端までの刈取走行でグレンタンク(5)が満杯未満になるようであれば穀稈植生域(60)の端までの刈取走行を続行し、満杯を超えるようであれば刈取走行を停止して運搬車(10)に向かう走行ルート(R)を辿る制御を行なうことを特徴とする請求項1に記載の自律走行コンバイン。
【請求項4】
自律走行コンバインの操縦席(19)近傍または管理者が持つ携帯端末(13)に自律走行コンバインの走行ルート(R)を表示することを特徴とする請求項1に記載の自律走行コンバイン。
【請求項5】
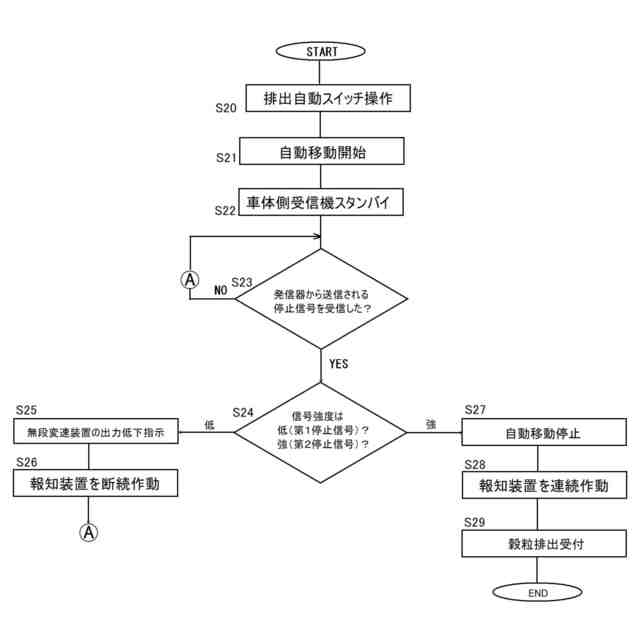
圃場の穀稈を刈り取る刈取装置(17)と穀稈から穀粒を脱穀する脱穀装置(11)と穀粒を溜めるグレンタン(5)ク及びグレンタンク(5)から穀粒を排出する排出オーガ(11)を備えた自律走行コンバインにおいて、穀粒を受け取る運搬車(10)に停止位置を送る運搬車発進機(23)を設け、自律走行コンバインの機体フレ-ム(6)に設けた車体側受信機(22)が弱停止位置信号を受信すると通常走行を行い、強停止位置信号を受信すると低速走行して停止制御を行なうことを特徴とする自律走行コンバイン。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場で自律走行しながら穀粒の収穫作業を行う自律走行コンバイン関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
自律走行コンバインは、特許文献1に記載されている。
【0003】
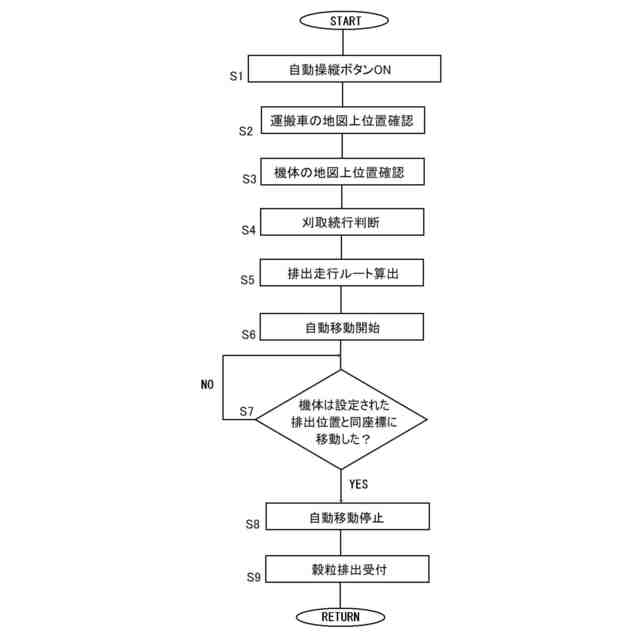
この自律走行コンバインは、自動操縦で自律走行しながら圃場に植生する穀稈を刈り取って脱穀して穀粒をグレンタンクに貯留し、グレンタンクが満杯になると刈取作業を中断し、畦道に停まった運搬車まで移動してグレンタンクから運搬車の穀粒タンクやフレコンバッグに穀粒を移し、再度圃場の収穫中断位置に戻って刈取収穫作業を再開するようにしている。
【先行技術文献】
【特許文献】
【0004】
特許第7156246号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記特許文献1には、穀稈の刈取作業中にグレンタンクが満杯となると運搬車に穀粒を排出しに行くが、その機会については、穀粒がグレンタンク内に一杯になる所定条件によって刈取作業から排出作業へと切り替わることが記載されているものの、具体的にどのように切り替えるかが必ずしも記載されていない。
【0006】
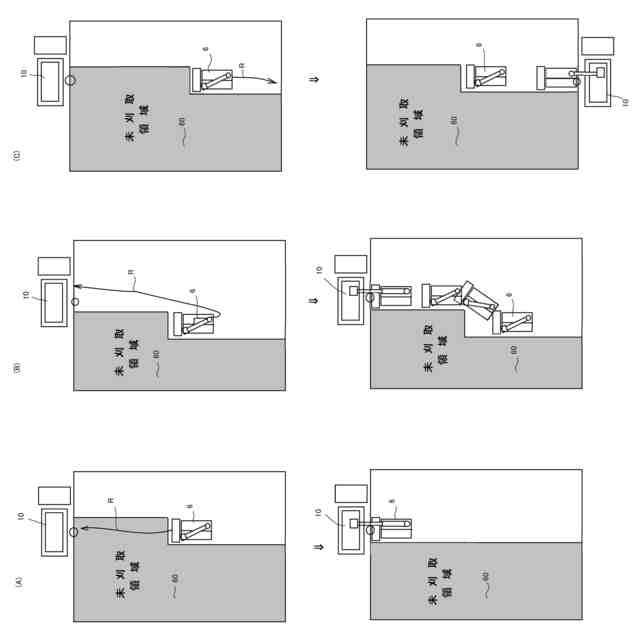
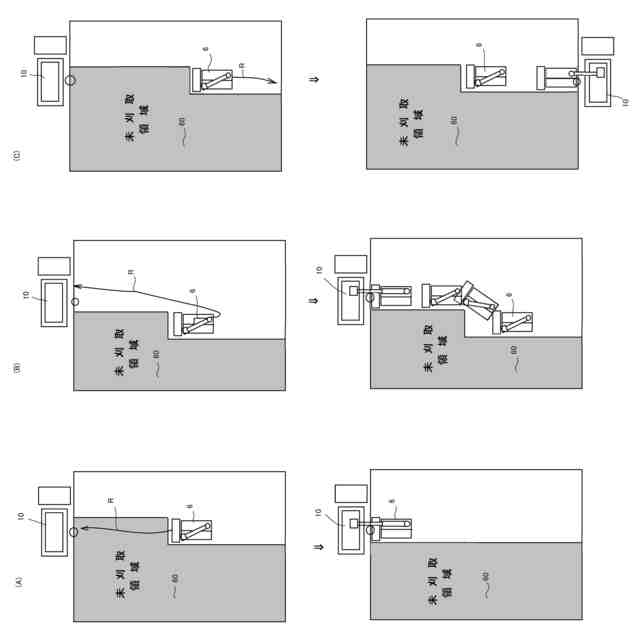
しかし、穀粒がグレンタンク内に一杯になるタイミングが穀稈植生域内で穀稈を刈りとっている途中であったり運搬車の停止位置が自律走行コンバインの機体から離れて遠かったりした場合には、未刈穀稈を踏まずに運搬車へ移動を開始するのが難しい場合もあることに本発明者は気付いた。
【0007】
本発明は、自律走行コンバインが収穫作業中にグレンタンクが穀粒で満杯近くになると、圃場の中央部であってもタイミング良く刈取作業を中断して未刈穀稈を踏まずに圃場周囲の畦道に停車している運搬車に自動で近づいて穀粒排出作業を行うようにすることを課題とする。
【課題を解決するための手段】
【0008】
上記本発明の課題は、次の技術手段により解決される。
【0009】
請求項1の発明は、圃場の穀稈を刈り取る刈取装置17と刈取穀稈を脱穀する脱穀装置12と脱穀した穀粒を溜めるグレンタンク5及びグレンタンク5から穀粒を排出する排出オーガ11を備えた自律走行コンバインにおいて、グレンタンク5の穀粒貯留量センサ25と機体フレ-ム6の地図上位置を認識する測位装置21と運搬車10の位置認識装置14を設け、穀粒貯留量センサ25が満杯近くを検出すると機体フレ-ム6と運搬車10の地図上位置により、穀稈植生域60を避けた走行ルートRを算出して走行開始可能にすることを特徴とする自律走行コンバインとする。
【0010】
請求項2の発明は、穀粒貯留量センサ25が所定の穀粒充満量を検出すると機体フレ-ム6の地図上位置を測位装置21で測定して登録した運搬車10の位置までの走行ルートRを算出して走行することを特徴とする請求項1に記載の自律走行コンバインとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
11日前
井関農機株式会社
収穫機
11日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
苗移植機
11日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
コンバイン
19日前
井関農機株式会社
コンバイン
19日前
井関農機株式会社
洗米炊飯装置
4日前
井関農機株式会社
乗用型苗植機
1か月前
井関農機株式会社
ロボット作業車両
13日前
井関農機株式会社
ロボット作業車両
1か月前
井関農機株式会社
ハイブリッドエンジン装置
1か月前
井関農機株式会社
SCRシステムおよび尿素水タンク
8日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
1か月前
個人
除草具
8日前
個人
殺虫スプレー
19日前
個人
ベアスタンガン
8日前
個人
ペット用玩具
5日前
井関農機株式会社
収穫機
11日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ