TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024120686
公報種別
公開特許公報(A)
公開日
2024-09-05
出願番号
2023027667
出願日
2023-02-24
発明の名称
作業機械及び作業機械の支援システム
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/26 20060101AFI20240829BHJP(水工;基礎;土砂の移送)
要約
【課題】搬送物の重量を算出することを目的とする。
【解決手段】上部旋回体に回動可能に取り付けられるアタッチメントと、前記アタッチメントに回転可能に取り付けられ、長尺の搬送物を把持する把持部と、前記アタッチメントを回動動作するトルクに基づいて、前記搬送物の重量を算出する搬送物重量算出部と、を備える作業機械であって、前記搬送物重量算出部は、前記把持部によって前記搬送物を把持した状態で前記把持部を所定の姿勢へ変化させて、前記搬送物の重量を算出する、作業機械である。
【選択図】図1
特許請求の範囲
【請求項1】
上部旋回体に回動可能に取り付けられるアタッチメントと、
前記アタッチメントに回転可能に取り付けられ、長尺の搬送物を把持する把持部と、
前記アタッチメントを回動動作するトルクに基づいて、前記搬送物の重量を算出する搬送物重量算出部と、を備える作業機械であって、
前記搬送物重量算出部は、前記把持部によって前記搬送物を把持した状態で前記把持部を所定の姿勢へ変化させて、前記搬送物の重量を算出する、作業機械。
続きを表示(約 960 文字)
【請求項2】
前記所定の姿勢は、
前記把持部の爪先が、前記上部旋回体の前方を向いた状態であり、
前記搬送物重量算出部は、前記所定の姿勢を維持した状態で、前記搬送物の重量を算出する、請求項1記載の作業機械。
【請求項3】
前記アタッチメントは、前記把持部を含むグラップルと、アームと、ブームとを含み、
前記ブームのフートピンから、前記把持部に把持された搬送物の重心までの重心距離を算出する搬送物重力距離算出部を有し、
前記搬送物重量算出部は、
前記重心距離と、前記アタッチメントを回動動作するトルクとに基づき、前記搬送物の重力を算出する、請求項1記載の作業機械。
【請求項4】
前記搬送物重力距離算出部は、
前記把持部による形成される把持空間の中心点を、前記把持部に把持された搬送物の重心として、前記重心距離を算出する、請求項3記載の作業機械。
【請求項5】
前記重心距離は、
前記把持空間の中心点から前記グラップルと前記アームとを接続するリンク機構までの距離と、前記リンク機構から前記ブームのフートピンまでの距離と、を合算した距離である、請求項4記載の作業機械。
【請求項6】
前記把持空間の中心点から前記グラップルと前記アームとを接続するリンク機構までの距離は、前記グラップルの仕様に応じて決められた既知の値である、請求項5記載の作業機械。
【請求項7】
前記リンク機構から前記ブームのフートピンまでの距離は、前記作業機械が有する姿勢センサから出力される値に基づき算出される、請求項6記載の作業機械。
【請求項8】
上部旋回体に回動可能に取り付けられるアタッチメントと、前記アタッチメントに回転可能に取り付けられ、長尺の搬送物を把持する把持部と、を備える作業機械の支援システムであって、
前記アタッチメントを回動動作するトルクに基づいて、前記搬送物の重量を算出する搬送物重量算出部を有し、
前記搬送物重量算出部は、前記把持部によって前記搬送物を把持した状態で前記把持部を所定の姿勢へ変化させて、前記搬送物の重量を算出する、作業機械の支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械及び作業機械の支援システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
近年では、エンジンと、該エンジンの動力により作動油を吐出する油圧ポンプと、該油圧ポンプから吐出する作動油により駆動し、原木を切断するチェーンソーを含むハーベスタ装置と、を備え、少なくとも前記チェーンソーの駆動が選択されたときに、前記油圧ポンプの吐出流量を多くすることを特徴とする、林業機械が開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2015-62355号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来から、丸太材等の長尺の搬送物をグラップルで把持して搬送する作業機械において、搬送物の重量を算出することが求められている。
【0005】
そこで、上記課題に鑑み、搬送物の重量を算出することを目的とする。
【課題を解決するための手段】
【0006】
本発明の実施形態に係る作業機械は、上部旋回体に回動可能に取り付けられるアタッチメントと、前記アタッチメントに回転可能に取り付けられ、長尺の搬送物を把持する把持部と、前記アタッチメントを回動動作するトルクに基づいて、前記搬送物の重量を算出する搬送物重量算出部と、を備える作業機械であって、前記搬送物重量算出部は、前記把持部によって前記搬送物を把持した状態で前記把持部を所定の姿勢へ変化させて、前記搬送物の重量を算出する、作業機械である。
【0007】
本発明の実施形態に係る作業機械の支援システムは、上部旋回体に回動可能に取り付けられるアタッチメントと、前記アタッチメントに回転可能に取り付けられ、長尺の搬送物を把持する把持部と、を備える作業機械の支援システムであって、前記アタッチメントを回動動作するトルクに基づいて、前記搬送物の重量を算出する搬送物重量算出部を有し、前記搬送物重量算出部は、前記把持部によって前記搬送物を把持した状態で前記把持部を所定の姿勢へ変化させて、前記搬送物の重量を算出する、作業機械の支援システムである。
【発明の効果】
【0008】
搬送物の重量を算出できる。
【図面の簡単な説明】
【0009】
本実施形態に係る作業機械の側面図である。
作業機械の構成の一例を概略的に示す図である。
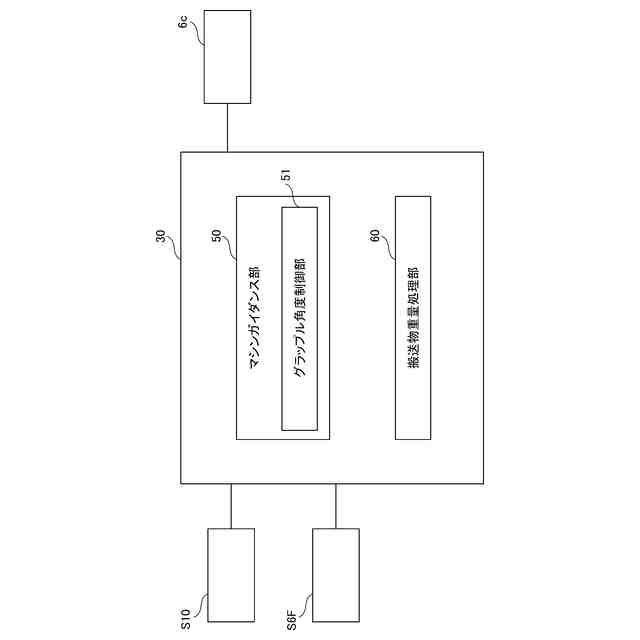
作業機械のうちの搬送物重量検出機能に関する構成部分の一例を概略的に示す図である。
搬送物重量算出部の処理を説明するブロック線図である。
グラップルの制御について説明する図である。
長尺の搬送物を把持した作業機械の正面図である。
【発明を実施するための形態】
【0010】
以下に、図面を参照して、本実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日鉄建材株式会社
土砂捕捉柵
24日前
日鉄建材株式会社
土砂捕捉柵
24日前
大和ハウス工業株式会社
柱脚
10日前
株式会社高知丸高
仮締切構造体
12日前
日本ソリッド株式会社
防舷材の保護方法
18日前
大和ハウス工業株式会社
バケット
24日前
株式会社エスイー
対土石流構造物
5日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
24日前
清水建設株式会社
杭圧入機
5日前
住友重機械工業株式会社
作業機械
4日前
エバタ株式会社
地下構造物の浮上防止方法
10日前
株式会社テノックス
共回り監視装置
20日前
株式会社西原鉄工所
コンクリートブロック
20日前
株式会社テノックス
深層混合処理工法
20日前
西部電機株式会社
水門開閉装置
17日前
株式会社日立建機ティエラ
建設機械
24日前
株式会社日立建機ティエラ
作業機械
24日前
鹿島建設株式会社
運搬機構および管体の搬送方法
18日前
C技研株式会社
切削装置
20日前
日鉄建材株式会社
梁部材の取付構造及び土砂捕捉柵
24日前
日立建機株式会社
作業車両
24日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業車両
24日前
株式会社田口クリエイト
バケット
10日前
日立建機株式会社
作業機械
24日前
ジオファーム株式会社
地盤補強工法
4日前
株式会社不動テトラ
流動化砂組成物及びその製造方法。
11日前
株式会社不二越
回転継手
10日前
株式会社笹山工業所
土壌の製造方法及び土壌の再利用方法
4日前
日立建機株式会社
建設機械の油圧制御システム
20日前
株式会社日立建機ティエラ
建設機械
24日前
スエヒロシステム株式会社
長尺アンカ一体型ライナー
6日前
株式会社熊谷組
既存杭撤去及び新設杭施工の連続工法
24日前
オリエンタル白石株式会社
仮設足場を用いた施工方法
4日前
パナソニックホームズ株式会社
住宅の構造
5日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ