TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024143761
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023056622
出願日
2023-03-30
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
3/43 20060101AFI20241003BHJP(水工;基礎;土砂の移送)
要約
【課題】作業装置の動作を所定の範囲に制限する制御の精度を向上することができる作業機械を提供する。
【解決手段】ショベルは、ブーム用油圧シリンダ11に対する圧油の流れを制御する制御弁25a~25cと、制御弁25a~25cを操作するパイロット圧を生成して出力する複数のパイロット電磁弁29a~29dと、作業装置7の動作を所定の範囲に制限するように複数のパイロット電磁弁29a~29dを制御する制限機能を有するコントローラ34と、ブーム8の落下を防止する落下防止機能を有する落下防止弁15と、落下防止弁15の落下防止機能を解除する信号を出力する電磁弁32とを備える。コントローラ34は、前記制限機能に関係する情報に基づいて、落下防止弁15の解除圧を演算し、演算された解除圧を、落下防止機能を解除する信号として落下防止弁15へ出力するように電磁弁32を制御する。
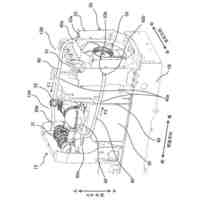
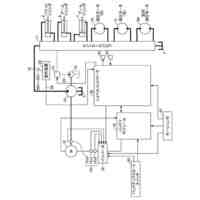
【選択図】図2
特許請求の範囲
【請求項1】
鉛直方向に回動可能な少なくとも1つの連結部材及びアタッチメントを有する多関節型の作業装置と、
前記連結部材を回動する油圧シリンダと、
前記油圧シリンダに対する圧油の流れを制御する制御弁と、
前記制御弁を操作するパイロット圧を生成して前記制御弁へ出力する複数のパイロット電磁弁と、
前記作業装置の動作を所定の範囲に制限するように前記複数のパイロット電磁弁を制御する制限機能を有するコントローラと、を備えた作業機械において、
前記連結部材の落下を防止する落下防止機能を有する落下防止弁と、
前記落下防止弁へ前記落下防止機能を解除する信号を出力する電磁弁と、を備え、
前記コントローラは、
前記複数のパイロット電磁弁を制御する前記制限機能に関係する情報に基づいて、前記落下防止弁の解除圧を演算し、
演算された解除圧を、前記落下防止機能を解除する信号として前記落下防止弁へ出力するように前記電磁弁を制御することを特徴とする作業機械。
続きを表示(約 890 文字)
【請求項2】
請求項1に記載の作業機械において、
前記制限機能は、前記アタッチメントの基準点が所定の目標面に沿って移動するように前記複数のパイロット電磁弁を制御する機能であり、
前記コントローラは、前記制限機能に関係する情報として、前記アタッチメントの基準点と前記所定の目標面との距離を演算し、演算された前記アタッチメントの基準点と前記所定の目標面との距離に基づいて、前記解除圧を演算し、演算された前記解除圧を前記落下防止弁へ出力するように前記電磁弁を制御することを特徴とする作業機械。
【請求項3】
請求項2に記載の作業機械において、
前記コントローラは、前記解除圧として、前記アタッチメントの基準点と前記所定の目標面との距離に応じて変化する解除圧と、前記連結部材を下方向に回動させるパイロット電磁弁のパイロット圧に相当する解除圧のいずれか大きい方を選択し、選択した前記解除圧を前記落下防止弁へ出力するように前記電磁弁を制御することを特徴とする作業機械。
【請求項4】
請求項1に記載の作業機械において、
前記制限機能は、前記作業装置が所定の作業領域から逸脱しないように前記複数のパイロット電磁弁を制御する機能であり、
前記コントローラは、前記制限機能に関係する情報として、前記作業装置と前記所定の作業領域の境界との距離を演算し、演算された前記作業装置と前記所定の作業領域の境界との距離に基づいて、前記解除圧を演算し、演算された前記解除圧を前記落下防止弁へ出力するように前記電磁弁を制御することを特徴とする作業機械。
【請求項5】
請求項4に記載の作業機械において、
前記コントローラは、前記解除圧として、前記作業装置と前記所定の作業領域の境界との距離に応じて変化する解除圧と、前記連結部材を下方向に回動させるパイロット電磁弁のパイロット圧に相当する解除圧のいずれか大きい方を選択し、選択した前記解除圧を前記落下防止弁へ出力するように前記電磁弁を制御することを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ショベル等の作業機械に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
作業機械の一つであるショベルにおいて、ブームの落下を防止する落下防止機能を有する落下防止弁を備えたものが知られている。例えば、特許文献1に示された落下防止弁は、ブーム用油圧シリンダのボトム側とブーム用制御弁との間の油路に設けられたポペット弁体と、ポペット弁体を移動させるスプール弁体とを有する。ポペット弁体が遮断位置にある場合にて、ブーム用制御弁側の圧力が高くなるとき、ポペット弁体が遮断位置から移動する。これにより、ブーム用油圧シリンダのボトム側への圧油の供給を許容し、ひいては、ブームの上げを許容する。ポペット弁体が遮断位置にある場合にて、配管の破断等の理由でブーム用制御弁側の圧力が低くなるとき、ポペット弁体が遮断位置から移動しない。これにより、ブーム用油圧シリンダのボトム側からの圧油の排出を阻止し、ひいては、ブームの落下を防止する。
【0003】
特許文献1の落下防止弁は、上述した落下防止機能を解除するために、操作装置のパイロット弁で生成されたパイロット圧が入力されるように構成されている。オペレータがブームの下げを意図して操作装置を操作した場合、操作装置のパイロット弁で生成されたパイロット圧に対応する移動量でスプール弁体が移動し、それに対応する移動量でポペット弁体が移動する。これにより、落下防止機能が解除される。すなわち、ブーム用油圧シリンダのボトム側からの圧油の排出を許容し、ひいては、ブームの下げを許容する。
【先行技術文献】
【特許文献】
【0004】
特開2006-097604号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
近年、オペレータを補助又は支援するために作業装置の動作を所定の範囲に制限する制限機能を有するショベルが提唱されている。このショベルのコントローラは、制御弁を操作するパイロット圧を生成して出力するパイロット電磁弁を制御して、制御弁を制御する。これにより、例えば、バケットの爪先先端が所定の目標面に沿って移動するように、あるいは、作業装置が所定の作業領域から逸脱しないように、作業装置の動作を制御する。
【0006】
上述した制限機能を有するショベルに対し、特許文献1の落下防止弁と、その落下防止機能を解除するために、操作装置のパイロット弁で生成されたパイロット圧を落下防止弁へ出力する構成とを採用する場合を想定すれば、次のような課題が生じる。落下防止弁の落下防止機能を解除するパイロット圧の大きさは、落下防止弁の個体差によってバラツキが生じる。したがって、作業装置の動作を所定の範囲に制限する制御を実行する際、例えばブームの始動タイミングや停止タイミングが目標値とずれてしまい、制御の精度が低下する可能性がある。
【0007】
本発明は、上記事柄に鑑みてなされたものであり、その目的は、作業装置の動作を所定の範囲に制限する制御の精度を向上することができる作業機械を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は、鉛直方向に回動可能な少なくとも1つの連結部材及びアタッチメントを有する多関節型の作業装置と、前記連結部材を回動する油圧シリンダと、前記油圧シリンダに対する圧油の流れを制御する制御弁と、前記制御弁を操作するパイロット圧を生成して前記制御弁へ出力する複数のパイロット電磁弁と、前記作業装置の動作を所定の範囲に制限するように前記複数のパイロット電磁弁を制御する制限機能を有するコントローラと、を備えた作業機械において、前記連結部材の落下を防止する落下防止機能を有する落下防止弁と、前記落下防止弁へ前記落下防止機能を解除する信号を出力する電磁弁と、を備え、前記コントローラは、前記複数のパイロット電磁弁を制御する前記制限機能に関係する情報に基づいて、前記落下防止弁の解除圧を演算し、演算された解除圧を、前記落下防止機能を解除する信号として前記落下防止弁へ出力するように前記電磁弁を制御する。
【発明の効果】
【0009】
本発明によれば、作業装置の動作を所定の範囲に制限する制御の精度を向上することができる。
【図面の簡単な説明】
【0010】
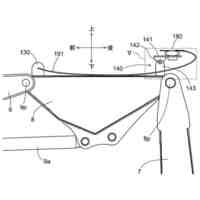
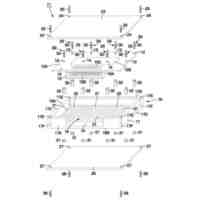
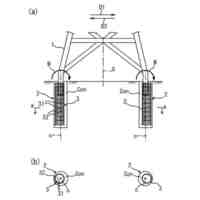
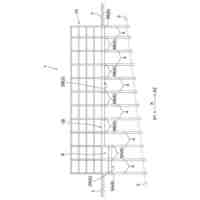
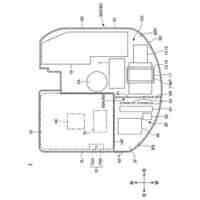
本発明の第1の実施形態におけるショベルの構造を表す側面図である。
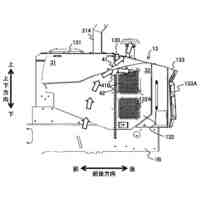
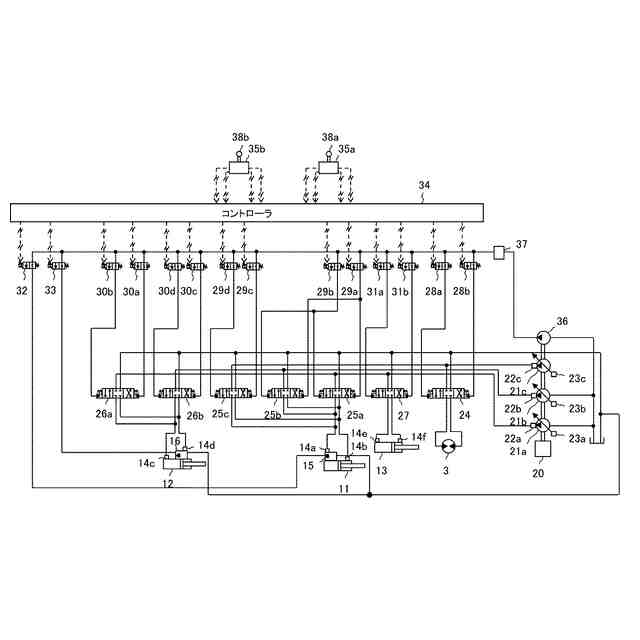
本発明の第1の実施形態における油圧システムの構成を表す図である。
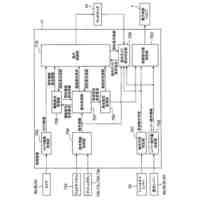
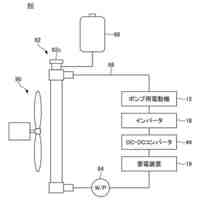
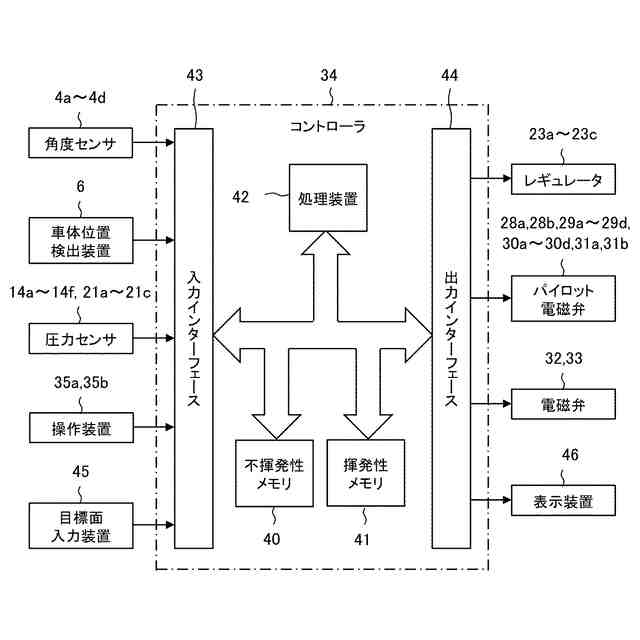
本発明の第1の実施形態におけるコントローラの物理的構成を関連機器と共に表すブロック図である。
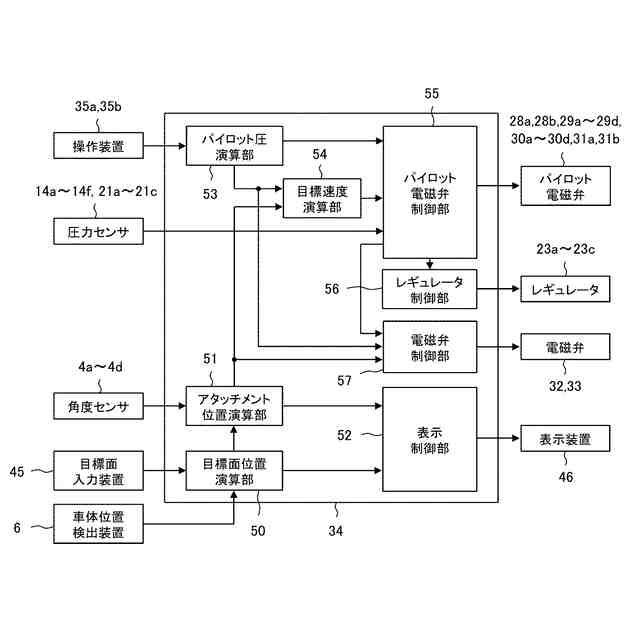
本発明の第1の実施形態におけるコントローラの機能的構成を関連機器と共に表すブロック図である。
本発明の第1の実施形態におけるショベル座標系を表す図である。
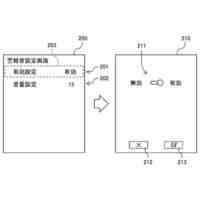
本発明の第1の実施形態における表示装置の画面を表す図である。
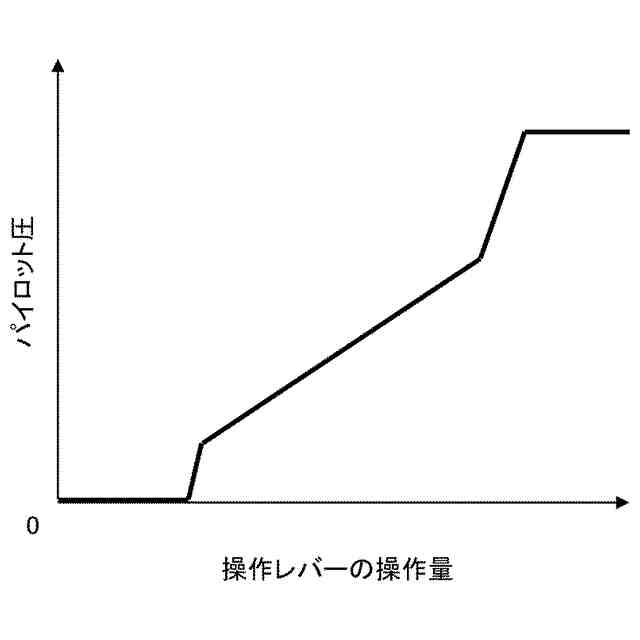
本発明の第1の実施形態における操作レバーの操作量とパイロット圧との相関テーブルを表す図である。
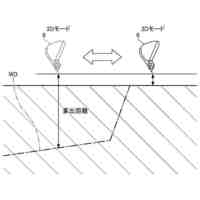
本発明の第1の実施形態における軌跡制御を説明するための図であり、目標面及びバケットの基準点の目標速度ベクトルを示す。
本発明の第1の実施形態におけるブーム用電磁弁の解除圧を設定する処理を表す図である。
本発明の第1の実施形態におけるアーム用電磁弁の解除圧を設定する処理を表す図である。
本発明の第1の実施形態における落下防止弁の解除圧と開口率の関係を表す図である。
本発明の第1の変形例におけるブーム用電磁弁の解除圧を設定する処理を表す図である。
本発明の第2の変形例における解除圧の演算テーブルを表す図である。
本発明の第3の変形例における解除圧の演算テーブルを表す図である。
本発明の第4の変形例におけるブーム用電磁弁の解除圧を設定する処理を表す図である。
本発明の第2の実施形態における逸脱防止制御を説明するための図であり、作業領域を示す。
本発明の第2の実施形態におけるコントローラの機能的構成を関連機器と共に表すブロック図である。
本発明の第2の実施形態におけるブーム用電磁弁の解除圧を設定する処理を表す図である。
本発明の第2の実施形態におけるアーム用電磁弁の解除圧を設定する処理を表す図である。
本発明の第5の変形例における解除圧の演算テーブルを表す図である。
本発明の第6の変形例における解除圧の演算テーブルを表す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
6日前
日立建機株式会社
建設機械
8日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業車両
13日前
日立建機株式会社
作業車両
13日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
減速装置
20日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
電子機器装置
今日
日立建機株式会社
ダンプトラック
1か月前
日立建機株式会社
コントローラの筐体
2か月前
日立建機株式会社
点検ワークフロー管理システム
1か月前
日立建機株式会社
作業機械
1か月前
個人
耐震原子炉設備
9日前
FKS株式会社
擁壁
14日前
株式会社forch
土採取装置
15日前
鹿島建設株式会社
基礎構造
8日前
株式会社クボタ
作業車
今日
株式会社竹中工務店
建築方法
6日前
株式会社富田製作所
継手部構造
8日前
株式会社竹中工務店
杭基礎構造
22日前
住友建機株式会社
ショベル
今日
住友建機株式会社
ショベル
今日
住友建機株式会社
ショベル
13日前
住友建機株式会社
ショベル
13日前
住友建機株式会社
ショベル
13日前
住友建機株式会社
ショベル
21日前
住友建機株式会社
ショベル
今日
住友建機株式会社
作業機械
1日前
住友建機株式会社
ショベル
7日前
住友建機株式会社
電動ショベル
20日前
株式会社テノックス九州
地盤改良方法
20日前
日立建機株式会社
建設機械
8日前
株式会社クボタ
作業車両
6日前
株式会社クボタ
作業機
8日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ