TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024143627
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023056401
出願日
2023-03-30
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人武和国際特許事務所
主分類
E02F
9/20 20060101AFI20241003BHJP(水工;基礎;土砂の移送)
要約
【課題】荷振れをより効果的に抑制する作業機械を提供する。
【解決手段】車体(101,102)及びフロント作業機(104,105,106)と、コントローラとを備えた作業機械(100)において、コントローラ(110)は、吊り荷(1)をフロント作業機によるフロント動作、旋回動作、及び走行動作の少なくとも一つにて目標停止位置に向かって移動した後、目標停止位置の手前にて一時起動停止を行った際の吊り荷振れ量を算出し、吊り荷が当該吊り荷の揺れの軌道において目標停止位置に向かって変位するタイミングで、吊り荷の吊り荷支点を目標停止位置に向かって移動させる制御を実行する。
【選択図】図13
特許請求の範囲
【請求項1】
車体と、
前記車体に取り付けられたフロント作業機と、
前記フロント作業機の姿勢を示す角度を計測する角度センサと、
前記車体の旋回速度を計測する旋回角度センサと、
前記フロント作業機の積載負荷を計測する積載負荷センサと、
コントローラと、を備えた作業機械において、
前記コントローラは、前記フロント作業機に吊り下げられた吊り荷の荷振れを抑制する荷振れ制御処理を実行し、前記荷振れ制御処理において、
前記角度センサから取得した角度情報に基づいて前記フロント作業機の姿勢を検出し、
前記積載負荷センサから取得した負荷情報に基づいて前記フロント作業機に吊り下げられた吊り荷の重量を算出し、
前記吊り荷をフロント作業機によるフロント動作、旋回動作、及び走行動作の少なくとも一つにて目標停止位置に向かって移動した後、前記目標停止位置の手前にて一時起動停止を行った際の吊り荷振れ量を算出し、
前記吊り荷が当該吊り荷の揺れの軌道において前記目標停止位置に向かって変位するタイミングで、前記吊り荷の吊り荷支点を前記目標停止位置に向かって移動させる制御を実行する、
ことを特徴とする作業機械。
続きを表示(約 290 文字)
【請求項2】
請求項1に記載の作業機械において、
前記吊り荷までの距離、速度、及び荷振れの周期を計測する計測カメラを更に備え、
前記計測カメラが、予め定めた荷振れ量を超える前記吊り荷の荷振れを検知すると、前記荷振れ制御処理を実行する、
ことを特徴とする作業機械。
【請求項3】
請求項1に記載の作業機械において、
前記コントローラは、
前記一時起動停止を行った際の吊り荷振れ量分の制御距離で前記吊り荷の吊り荷支点を前記目標停止位置に向かって平行移動させる制御を実行する、
ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は作業機械に係り、特に荷吊作業が行える作業機械に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
油圧ショベルでのクレーン作業では吊り荷の振れ抑制に関する制御技術としてフロントや旋回動作の起動停止前に減速や動作速度を制限して吊り荷の振れを抑制する制御技術が存在する。その一例として特許文献1の明細書段落0015には、「第4発明にかかる建設機械車両は、荷吊作業を行える建設機械車両において、荷吊作業機の要所に作業機姿勢検出手段および負荷検出手段が設けられ、前記荷吊作業機の駆動装置を制御する制御装置に前記作業機姿勢検出手段および負荷検出手段からの検知信号を送信して荷吊作業機の制御を行わせるようにされ、作業機の吊荷荷重が定格荷重限界に近づくにつれてその作業機の作動速度を減速・停止するように前記駆動装置をなす油圧回路中のパイロット操作弁を制御する構成であることを特徴とする。」と開示されている。
【0003】
そして同段落0016によると「作業機の運転操作で、荷吊作業機の要所に設けられる作業機姿勢検出手段および負荷検出手段が検出する信号によって、荷吊位置が定格荷重の規制領域に近づくと駆動装置の作動速度を減速させて、作業機の移動速度が減速されることにより、過度な移動を抑止すると同時に吊荷の荷振れを少なくし、荷下ろしなどの操作が円滑に行えるという効果がある。また、定格荷重の規制領域を越えて動作しようとすると動きを停止させる。こうすることによって、過荷重になるのを防止して安全性の確保を図ることができる。」との記載がある。
【先行技術文献】
【特許文献】
【0004】
特開2002-250055号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記の従来の油圧ショベルでのクレーン作業では、荷振れが発生すると振れが収まるのを待つ必要があるため、荷振れが収まるまで待つ時間が作業効率の低下を招くという課題がある。
【0006】
そこで本発明は、荷振れをより効果的に抑制する作業機械を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明は車体と、前記車体に取り付けられたフロント作業機と、前記フロント作業機の姿勢を示す角度を計測する角度センサと、前記車体の旋回速度を計測する旋回角度センサと、前記フロント作業機の積載負荷を計測する積載負荷センサと、コントローラと、を備えた作業機械において、前記コントローラは、前記フロント作業機に吊り下げられた吊り荷の荷振れを抑制する荷振れ制御処理を実行し、前記荷振れ制御処理において、前記角度センサから取得した角度情報に基づいて前記フロント作業機の姿勢を検出し、前記積載負荷センサから取得した負荷情報に基づいて前記フロント作業機に吊り下げられた吊り荷の重量を算出し、前記吊り荷をフロント作業機によるフロント動作、旋回動作、及び走行動作の少なくとも一つにて目標停止位置に向かって移動した後、前記目標停止位置の手前にて一時起動停止を行った際の吊り荷振れ量を算出し、前記吊り荷が当該吊り荷の揺れの軌道において前記目標停止位置に向かって変位するタイミングで、前記吊り荷の吊り荷支点を前記目標停止位置に向かって移動させる制御を実行する、ことを特徴とする。
【発明の効果】
【0008】
本発明によれば、荷振れをより効果的に抑制する作業機械を提供することができる。上記した以外の目的、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
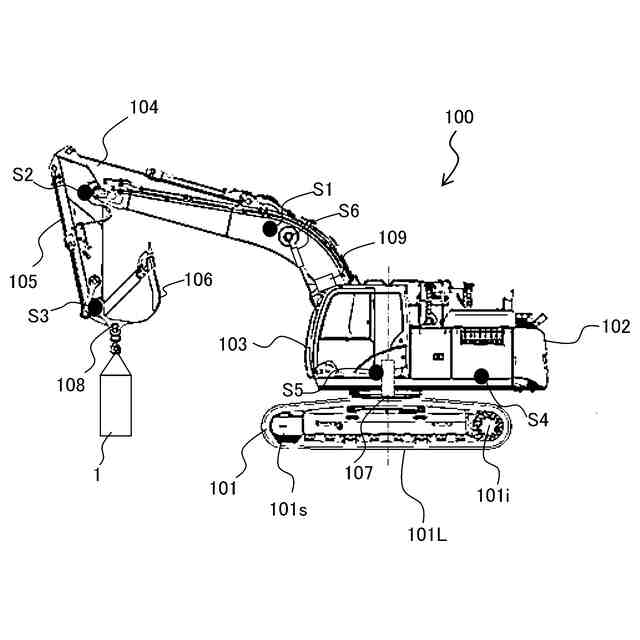
油圧ショベルの構成を示す左側面図である。
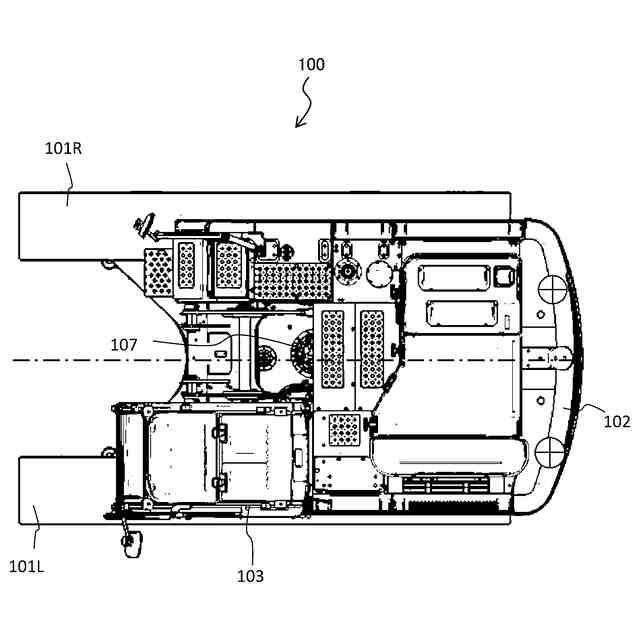
油圧ショベルの車体構成を示す上面図である。
MLフックの拡大図であり、(a)はAリンクの側面図、(b)はAリンクの正面図、(c)はフック付きAリンクの正面図、(d)はMLフックを取り付けた状態の側面図、(e)はMLフックを取り付けた状態の正面図、(f)はMLフックを取り付けた状態の拡大正面図、(g)はMLフックを取り付けた状態の拡大側面図、(h)はMLフックを取り付けた状態の拡大斜視図である。
油圧ショベルによる従来の吊り下げ作業の説明図である。
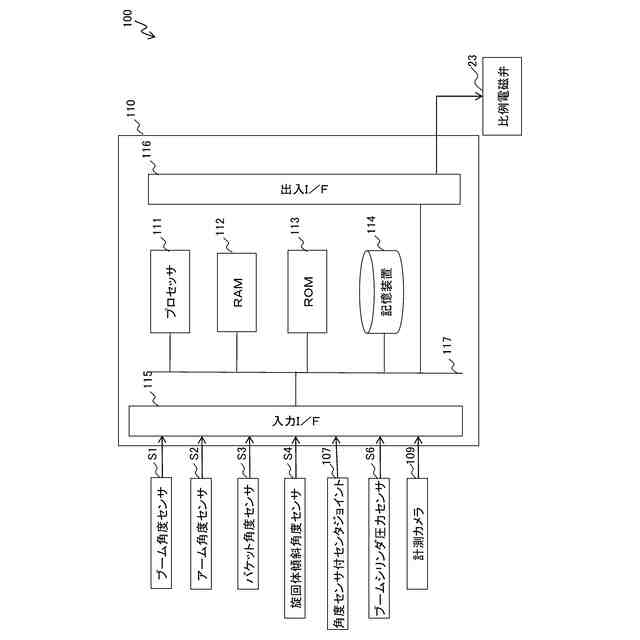
油圧ショベルのハードウェア構成を示すブロック図である。
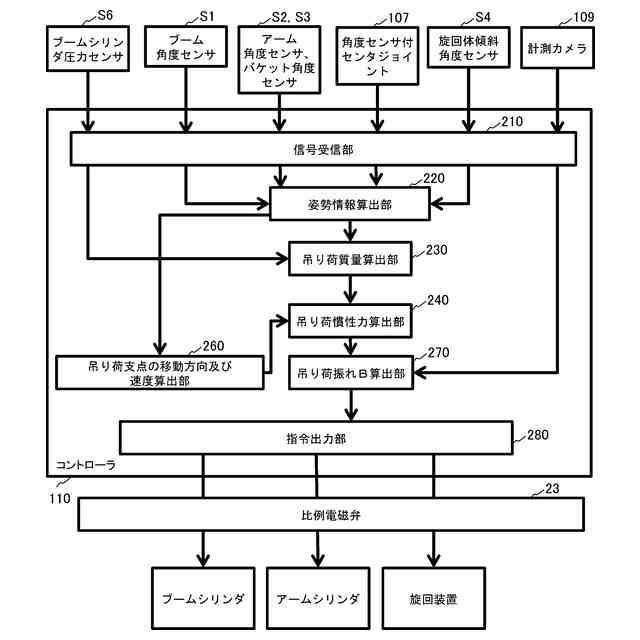
油圧ショベルに搭載されるコントローラの機能ブロック図である。
本実施形態に係る油圧ショベルによる吊り荷振れ抑制処理の流れを示すフローチャートである。
本実施形態に係る油圧ショベルによる吊り荷振れ抑制処理の流れを示すフローチャートである。
フロント作業機の作業姿勢の求め方を示す説明図である。
吊り荷の振れ制御に用いるパラメータの説明図である。
振れ量Bの算出方法を示す説明図である。
制御距離の算出式の説明図である。
本実施形態に係る油圧ショベルによる荷振れ抑制効果の説明図であり、(a)は従来例、(b)は本実施形態に係る油圧ショベルによる荷振れ抑制効果を示す。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態を図面に基づいて詳細に説明する。なお、実施形態を説明するための全図において、同一の機能を有する部材には同一又は関連する符号を付し、その繰り返しの説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る





 特許ウォッチ
特許ウォッチ