TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024120247
公報種別
公開特許公報(A)
公開日
2024-09-05
出願番号
2023026915
出願日
2023-02-24
発明の名称
作業機械の制御システム及び作業機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
9/20 20060101AFI20240829BHJP(水工;基礎;土砂の移送)
要約
【課題】作業効率の低下を抑制すること。
【解決手段】作業機械の制御システムは、旋回体と、旋回体を旋回させるために操作される操作装置と、旋回体の旋回を停止可能な旋回駐車ブレーキと、旋回体を自動制御する自動制御指令を出力する自動制御指令部と、操作装置の操作状態又は自動制御指令の出力状態に基づいて、旋回駐車ブレーキを制御するブレーキ制御部と、を備える。
【選択図】図7
特許請求の範囲
【請求項1】
旋回体と、
前記旋回体を旋回させるために操作される操作装置と、
前記旋回体の旋回を停止可能な旋回駐車ブレーキと、
前記旋回体を自動制御する自動制御指令を出力する自動制御指令部と、
前記操作装置の操作状態又は前記自動制御指令の出力状態に基づいて、前記旋回駐車ブレーキを制御するブレーキ制御部と、を備える、
作業機械の制御システム。
続きを表示(約 1,000 文字)
【請求項2】
前記自動制御指令は、前記操作装置の操作に基づかない指令である、
請求項1に記載の作業機械の制御システム。
【請求項3】
前記自動制御指令は、前記操作装置の操作により変更された指令である、
請求項1に記載の作業機械の制御システム。
【請求項4】
前記自動制御指令に基づいて、前記旋回体を制御する動作制御部を備える、
請求項1に記載の作業機械の制御システム。
【請求項5】
前記ブレーキ制御部は、前記自動制御指令の出力状態がブレーキ作動条件を満たした場合に、前記旋回駐車ブレーキを制動させる
請求項4に記載の作業機械の制御システム。
【請求項6】
前記自動制御指令が出力されない手動モードにおいて、前記操作装置の操作状態がブレーキ作動条件を満たした場合に、前記ブレーキ制御部は、前記旋回駐車ブレーキを制動させる、
請求項1に記載の作業機械の制御システム。
【請求項7】
前記旋回体を旋回させる油圧モータと、
前記油圧モータに供給される作動油の方向及び流量を調整するメインバルブと、
前記メインバルブのスプールを移動させるためのパイロット圧を前記メインバルブに与える制御バルブと、
前記自動制御指令に基づいて、前記旋回体を制御する駆動信号を出力する動作制御部と、を備え、
前記ブレーキ制御部は、前記動作制御部から出力される駆動信号に基づいて、前記旋回駐車ブレーキを制御する、
請求項1に記載の作業機械の制御システム。
【請求項8】
前記駆動信号に基づく前記パイロット圧によって前記旋回駐車ブレーキが制御される、
請求項7に記載の作業機械の制御システム。
【請求項9】
前記自動制御を開始するために操作される自動開始入力装置を備え、
前記自動制御指令部は、前記自動開始入力装置が操作された場合、前記自動制御指令を出力する、
請求項1に記載の作業機械の制御システム。
【請求項10】
前記旋回体に取り付けられる作業機と、
掘削対象に設定された掘削目標位置を記憶する目標位置記憶部と、を備え、
前記自動制御指令部は、前記作業機のバケットが前記掘削目標位置に移動するように、前記自動制御指令を出力する、
請求項9に記載の作業機械の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の制御システム及び作業機械の制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
作業機械に係る技術分野において、特許文献1に開示されているような、掘削から排土までの一連の動作が自動制御される作業機械が知られている。また、旋回体の旋回を停止可能な旋回駐車ブレーキを備える作業機械が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-011694号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
旋回体の手動操作において、オペレータは、旋回体を旋回させるための操作レバーを操作する。旋回体は、操作レバーの操作に基づいて旋回する。操作レバーの中立状態が所定時間を経過すると旋回駐車ブレーキが自動的に作動する技術が知られている。旋回体の自動制御が開始されると、オペレータは、操作レバーを動かさなかったり操作レバーから手を離したりする可能性が高い。すなわち、旋回体の自動制御が開始されると、操作レバーが中立状態になる可能性が高い。旋回体の自動制御において、操作レバーの中立状態が所定時間を経過すると、旋回駐車ブレーキが作動してしまう可能性がある。その結果、作業機械の作業効率が低下する可能性がある。
【0005】
本開示は、作業効率の低下を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、旋回体と、旋回体を旋回させるために操作される操作装置と、旋回体の旋回を停止可能な旋回駐車ブレーキと、旋回体を自動制御する自動制御指令を出力する自動制御指令部と、操作装置の操作状態又は自動制御指令の出力状態に基づいて、旋回駐車ブレーキを制御するブレーキ制御部と、を備える、作業機械の制御システムが提供される。
【発明の効果】
【0007】
本開示によれば、作業効率の低下が抑制される。
【図面の簡単な説明】
【0008】
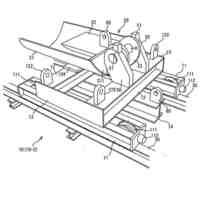
図1は、実施形態に係る作業機械を示す斜視図である。
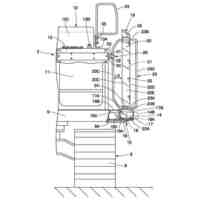
図2は、実施形態に係る作業機械を示す模式図である。
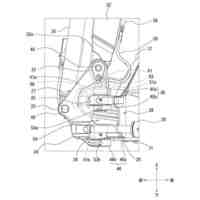
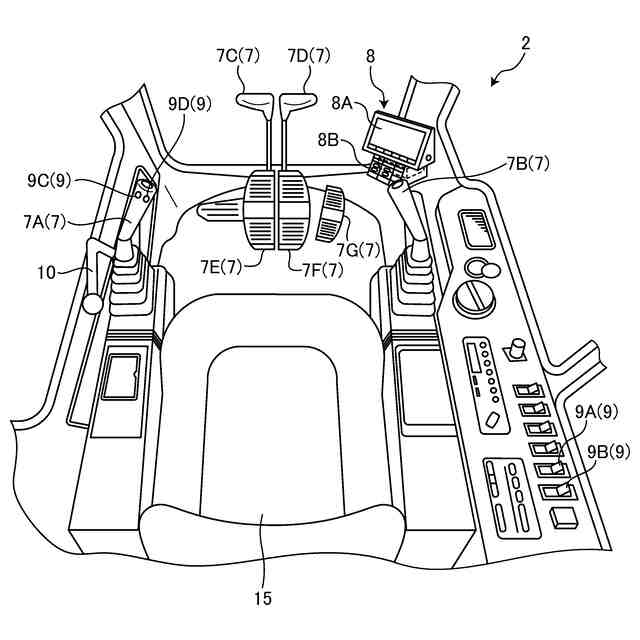
図3は、実施形態に係る作業機械の運転室を示す図である。
図4は、実施形態に係る作業機械の動作を説明するための図である。
図5は、実施形態に係る作業機械の動作を説明するための図である。
図6は、実施形態に係るダウン旋回目標位置及びホイスト旋回目標位置を設定するティーチング処理を説明するための図である。
図7は、実施形態に係る作業機械の制御システムを示すブロック図である。
図8は、実施形態に係る自動制御の可否判定及び動作モードの切り換えを説明するための図である。
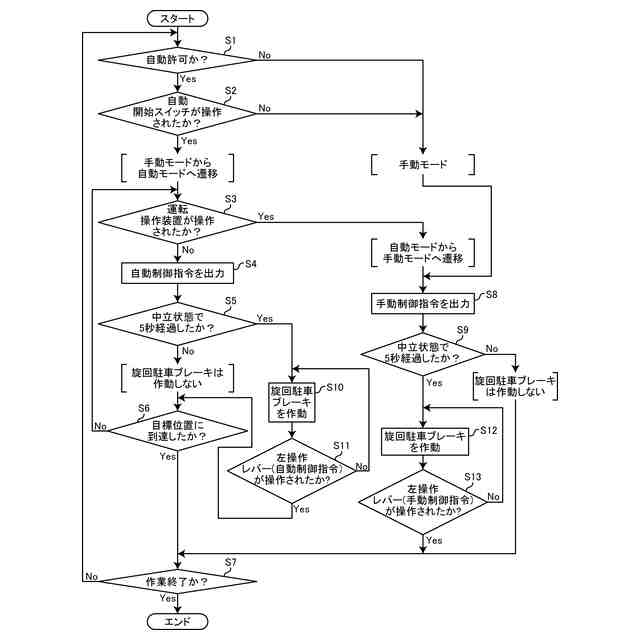
図9は、実施形態に係る作業機械の制御方法を示すフローチャートである。
図10は、実施形態に係るコンピュータシステムを示すブロック図である。
図11は、他の実施形態に係る作業機械の制御システムの一部を示すブロック図である。
図12は、他の実施形態に係る作業機械の制御システムの一部を示すブロック図である。
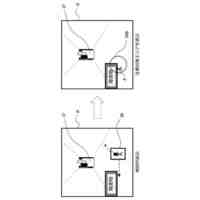
図13は、他の実施形態に係る作業機械の遠隔操作システムを示す模式図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[作業機械]
図1は、実施形態に係る作業機械1を示す斜視図である。図2は、実施形態に係る作業機械1を示す模式図である。図3は、実施形態に係る作業機械1の運転室2を示す図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
大和ハウス工業株式会社
柱脚
10日前
日鉄建材株式会社
土砂捕捉柵
24日前
日鉄建材株式会社
土砂捕捉柵
24日前
株式会社高知丸高
仮締切構造体
12日前
日本ソリッド株式会社
防舷材の保護方法
18日前
大和ハウス工業株式会社
バケット
24日前
株式会社エスイー
対土石流構造物
5日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
建設機械
25日前
住友重機械工業株式会社
作業機械
4日前
清水建設株式会社
杭圧入機
5日前
株式会社テノックス
共回り監視装置
20日前
株式会社西原鉄工所
コンクリートブロック
20日前
エバタ株式会社
地下構造物の浮上防止方法
10日前
株式会社テノックス
深層混合処理工法
20日前
西部電機株式会社
水門開閉装置
17日前
株式会社日立建機ティエラ
作業機械
24日前
株式会社日立建機ティエラ
建設機械
24日前
炎重工株式会社
桟橋及び移動体システム
24日前
C技研株式会社
切削装置
20日前
鹿島建設株式会社
運搬機構および管体の搬送方法
18日前
コベルコ建機株式会社
作業機械の制御装置
25日前
日立建機株式会社
建設機械
25日前
日立建機株式会社
建設機械
25日前
日立建機株式会社
建設機械
25日前
ヤンマーホールディングス株式会社
作業機械
25日前
ヤンマーホールディングス株式会社
建設機械
25日前
日鉄建材株式会社
梁部材の取付構造及び土砂捕捉柵
24日前
株式会社田口クリエイト
バケット
10日前
日立建機株式会社
作業車両
24日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業車両
24日前
日立建機株式会社
作業機械
24日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ