TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024114548
公報種別
公開特許公報(A)
公開日
2024-08-23
出願番号
2023020391
出願日
2023-02-13
発明の名称
回転機構、飛行体、積載物の姿勢制御装置、方法
出願人
個人
代理人
主分類
B64C
17/02 20060101AFI20240816BHJP(航空機;飛行;宇宙工学)
要約
【課題】
姿勢、位置制御に関する。飛行体に対する積載物の位置制御を行う。
【解決手段】
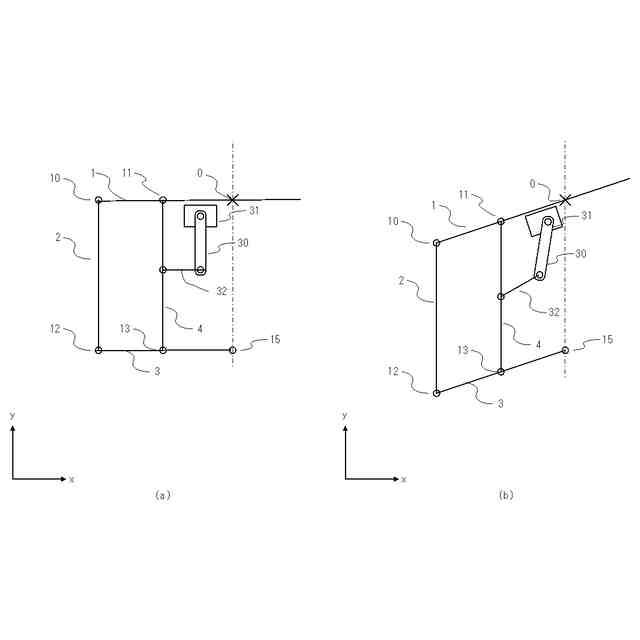
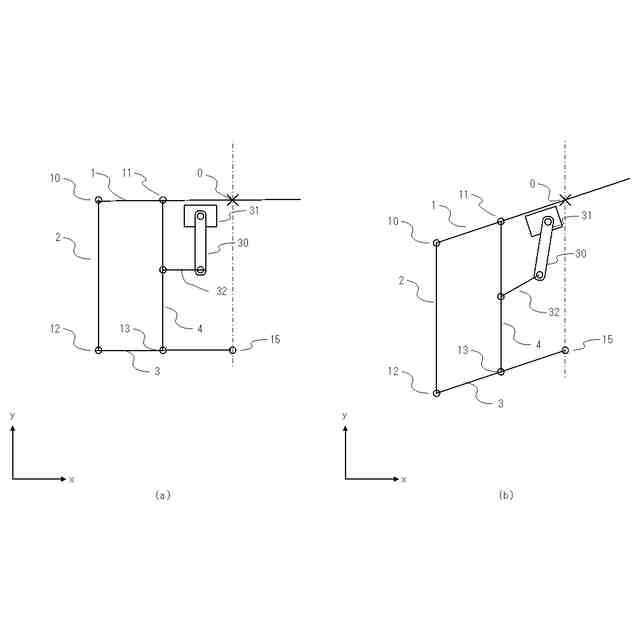
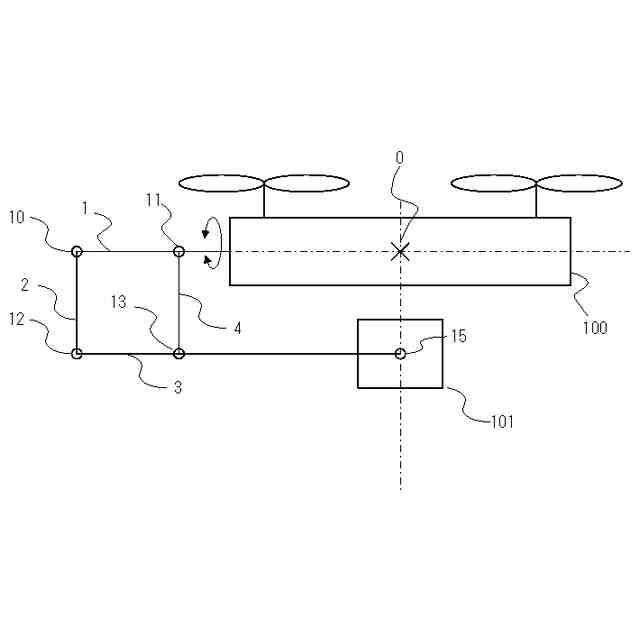
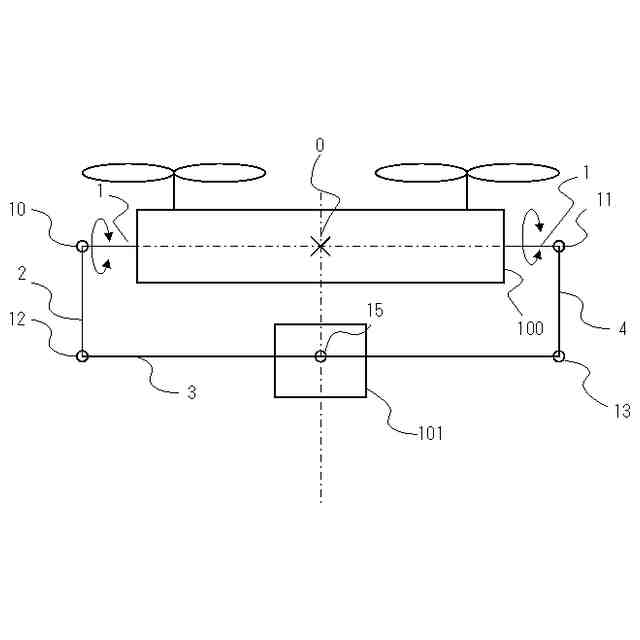
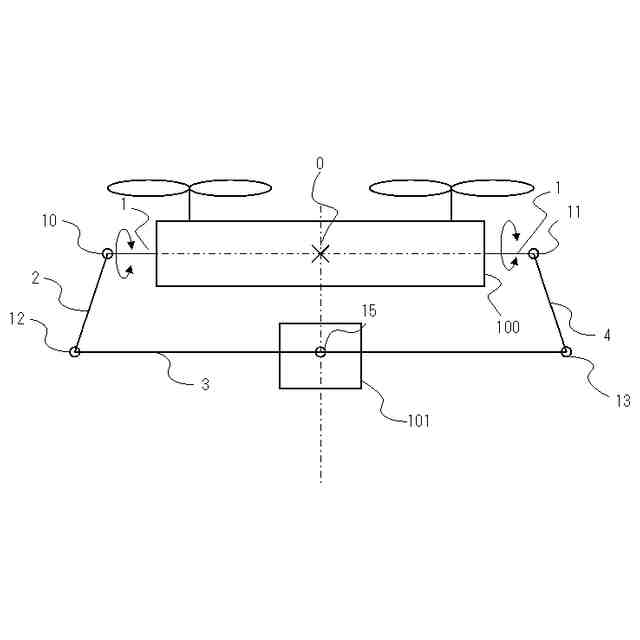
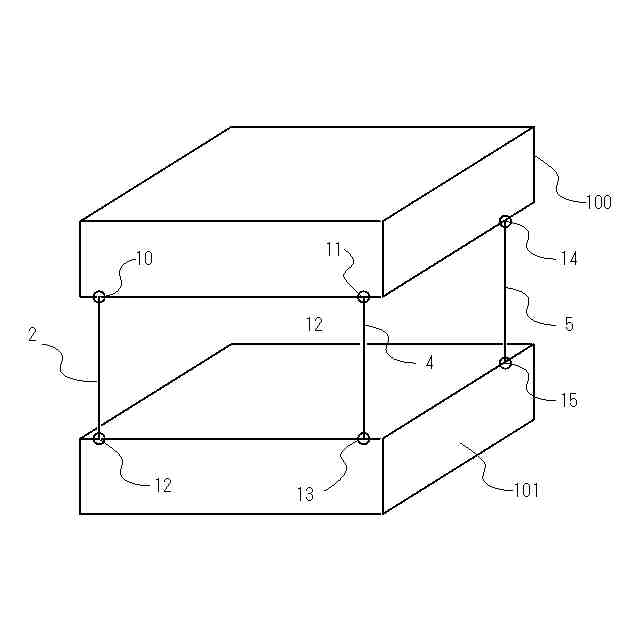
リンクXとリンクAとはジョイントXAで接続され、
リンクAとリンクBとはジョイントABで接続され、
リンクBとリンクYとはジョイントBYで接続され、
リンクCはリンクX上のジョイントXCとリンクB上のジョイントBCで接続され、
ジョイントXAとXCを結ぶ直線とジョイントABとBCを結ぶ直線が平行であり、
ジョイントXAとABを結ぶ直線とジョイントXCとBCを結ぶ直線が平行であるようにジョイントが配置された機構であって、
リンクXに飛行体が接続され、あるいは、リンクXが飛行体であり、
リンクBに積載物が接続され、あるいは、リンクBが積載物である回転機構とする。
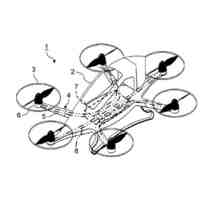
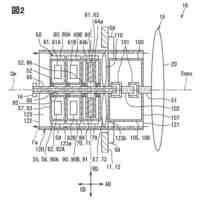
【選択図】図1
特許請求の範囲
【請求項1】
リンクXとリンクAとはジョイントXAで接続され、
リンクAとリンクBとはジョイントABで接続され、
リンクBとリンクYとはジョイントBYで接続され、
リンクCはリンクX上のジョイントXCとリンクB上のジョイントBCで接続され、
ジョイントXAとXCを結ぶ直線とジョイントABとBCを結ぶ直線が平行であり、
ジョイントXAとABを結ぶ直線とジョイントXCとBCを結ぶ直線が平行であるようにジョイントが配置された機構であって、
リンクXに飛行体が接続され、あるいは、リンクXが飛行体であり、
リンクBに積載物が接続され、あるいは、リンクBが積載物である回転機構。
。
続きを表示(約 190 文字)
【請求項2】
前記飛行体を前記回転機構に対してもう一軸方向に回転可能に接続した請求項1の回転機構。
【請求項3】
前記積載物の重心が前記飛行体の下部に位置するように制御される請求項1から請求項2いずれかの回転機構。
【請求項4】
前記積載物の重心が前記飛行体に対して所定の位置になるように制御される請求項1から請求項2いずれかの回転機構。
発明の詳細な説明
【技術分野】
【0001】
姿勢、位置制御に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年ドローンと呼ばれる、飛行体を用いた配送を実現するための開発が進められている。
ドローンの多くは、機体の中心部付近に、制御用のコンピューターやバッテリー、センサーなどを備える構成である。飛行において重量のある構成物を機体の中心付近に置いたほうが、慣性モーメントが少なくなり、機体の運動に有利である。また、加速度センサーなど、飛行体の中心に置いたほうが制御、センシングにおいて有利である。
【0003】
飛行体に積載物を取り付ける際の問題点や懸念事項は次のとおりである。積載物を飛行体に取り付けることで、重心が変化し、飛行体の飛行性能に悪影響を及ぼす。飛行体が姿勢を変化させることで、飛行体に接続した積載物の姿勢も変化してしまう。積載物の重さや形状は、積載物に応じて異なるため、専用の重心設計をした飛行体を用いるのは非効率である。そのため、前記積載物の姿勢変化を打ち消すための機構が必要である。
【0004】
ドローンにジンバル機構を備え、ドローンと積載物をジンバル機構で接続することで、ドローンの姿勢変化による積載物の姿勢変化を打つ消す方法がある。しかし、ジンバル機構の回転中心が、ドローンの姿勢変化の回転中心と一致しない場合には、積載物の自重によってドローンを回転させる力が生じてしまい、ドローンはその力を打ち消すための姿勢変化をさせる力を発生させる必要が生じる。この問題を解決するためには、機体中心にジンバルを配置する必要がある。
【先行技術文献】
【特許文献】
【0005】
特開2019-059480
【発明の概要】
【発明が解決しようとする課題】
【0006】
一般的なジンバルでは、ジンバルによる回転中心は、モーターや車軸、回転の出力軸のような物理的な回転軸、もしくはその延長線に制限される。
【0007】
ジンバルをドローンに適用する場合では、一般的に、ドローンの回転中心は機体の内部に位置していることが多い。その為、上記の問題を解消するためにジンバルによる回転中心をドローンの姿勢変化の回転中心と一致させる必要である。
【0008】
そこで、本願発明では、積載物の回転中心の位置の設定、設計可能な構成を提供する。
【0009】
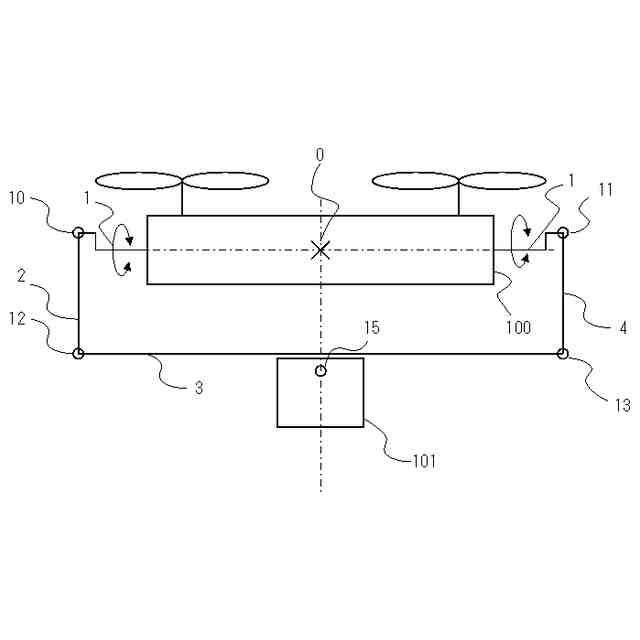
また、飛行体に適用する場合では、飛行体に積載する積載物の飛行体の位置と姿勢に対する位置を制御する機構を備えることで、重心位置の変化を抑え、飛行効率、安定性を向上する。
【課題を解決するための手段】
【0010】
リンクXとリンクAとはジョイントXAで接続され、
リンクAとリンクBとはジョイントABで接続され、
リンクBとリンクYとはジョイントBYで接続され、
リンクCはリンクX上のジョイントXCとリンクB上のジョイントBCで接続され、
ジョイントXAとXCを結ぶ直線とジョイントABとBCを結ぶ直線が平行であり、
ジョイントXAとABを結ぶ直線とジョイントXCとBCを結ぶ直線が平行であるようにジョイントが配置された機構であって、
リンクXに回転体Xが接続され、あるいは、リンクXが回転体Xであり、
リンクBに回転体Bが接続され、あるいは、リンクBが回転体Bである回転機構とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
1か月前
個人
ドローンシステム
3か月前
株式会社三圓
浮上装置
7か月前
個人
陸海空用の乗り物
5日前
個人
空港用貨物搬送車
11か月前
個人
垂直離着陸機用エンジン改
2か月前
個人
飛行艇
9か月前
個人
ドローンの計測操作方法2
7か月前
個人
ドローンの計測操作方法3
7か月前
個人
人工衛星推進材循環エンジン
11か月前
キヤノン電子株式会社
磁気トルカ
8か月前
個人
空中移動システム
4か月前
個人
ドローンを自動離着陸する方法
3か月前
個人
ドローン消音装置
5か月前
個人
エアライナー全自動パラシュート
1か月前
トヨタ自動車株式会社
ドローン
1か月前
合同会社アドエア
飛行体の落下補助装置
4か月前
株式会社中北製作所
羽ばたき装置
12か月前
株式会社SUBARU
電動航空機
11か月前
株式会社中北製作所
羽ばたき装置
11か月前
株式会社ACSL
システム
1か月前
株式会社ACSL
システム
1か月前
株式会社セネック
ドローンポート
10か月前
株式会社セネック
ドローンポート
10か月前
合同会社アドエア
パラシュート射出装置
1か月前
全日本空輸株式会社
ドーリシステム
6か月前
株式会社SUBARU
回転翼航空機
11か月前
個人
垂直離着陸機用ガスタービンエンジン
3か月前
株式会社SUBARU
移動体
4か月前
ミネベアミツミ株式会社
無人機
29日前
ミネベアミツミ株式会社
無人機
29日前
HDサービス合同会社
カメラ装着装置
5か月前
本田技研工業株式会社
航空機
6か月前
株式会社SUBARU
構造体の製造方法
7か月前
株式会社デンソー
推進装置
9か月前
本田技研工業株式会社
移動体
8か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ