TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024110891
公報種別
公開特許公報(A)
公開日
2024-08-16
出願番号
2023072312,2023015508
出願日
2023-04-26,2023-02-03
発明の名称
把握方法
出願人
興和株式会社
代理人
個人
主分類
G06T
7/70 20170101AFI20240808BHJP(計算;計数)
要約
【課題】複数のカメラの相対的な関係を高精度に把握することができる把握方法、画像処理方法、画像処理プログラム、画像処理装置、及び基準部材を提供する。
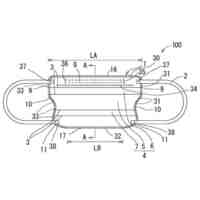
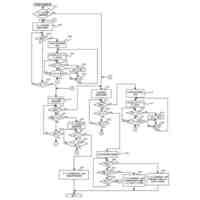
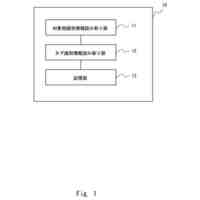
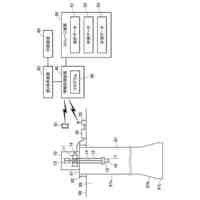
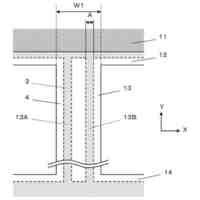
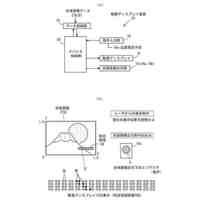
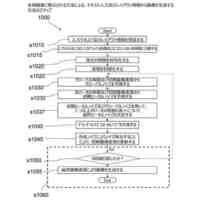
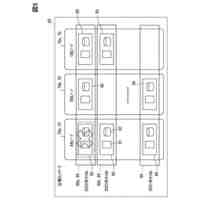
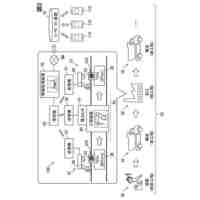
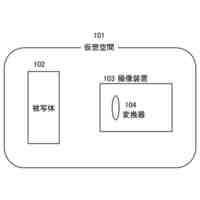
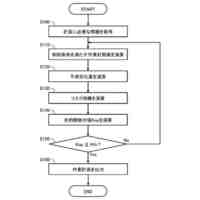
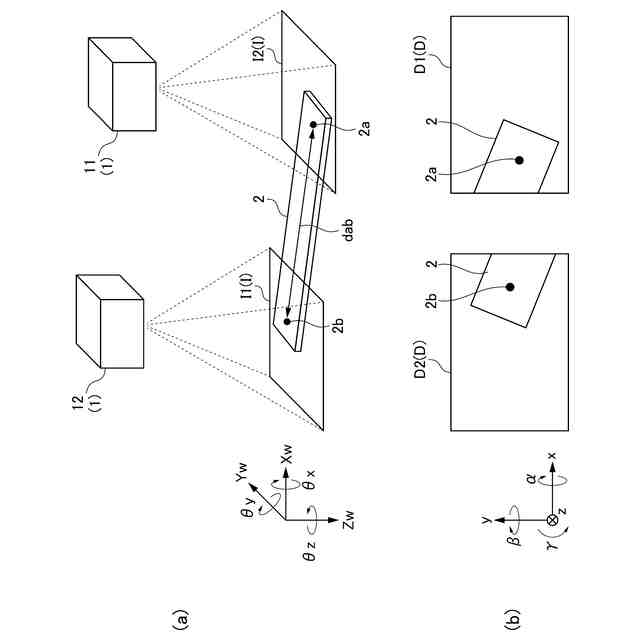
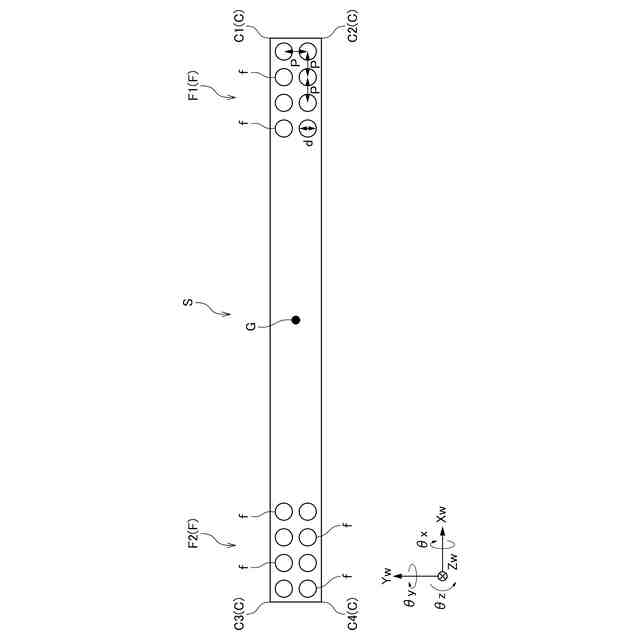
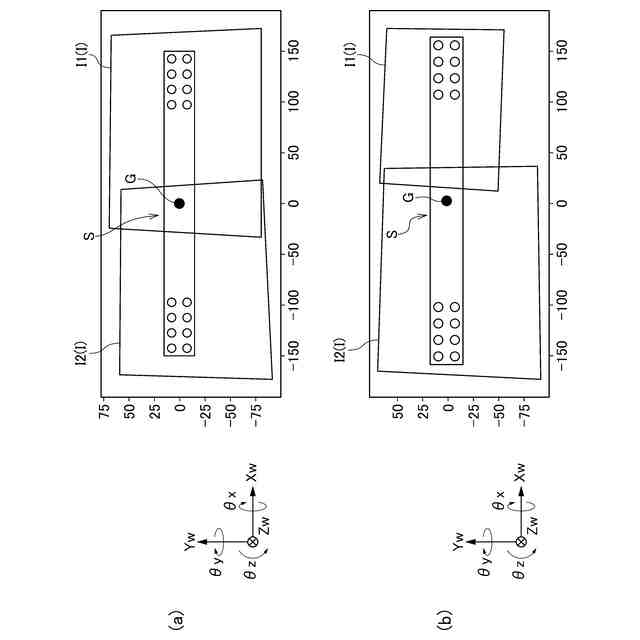
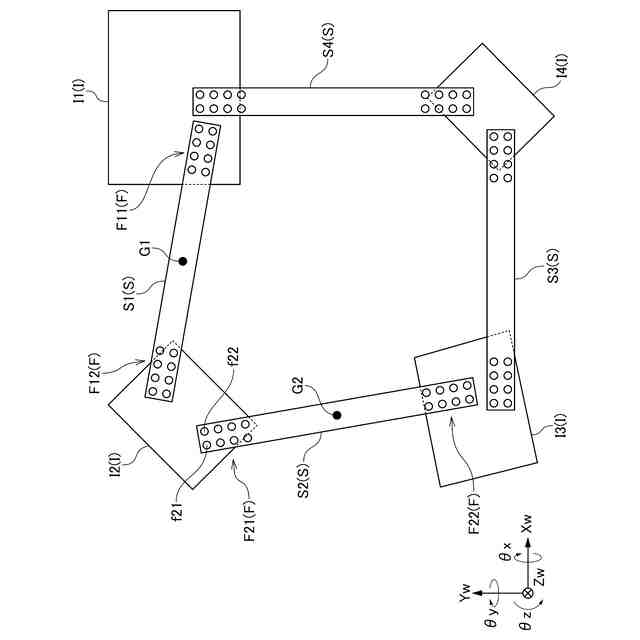
【解決手段】対象物2の異なる部分を撮像するために設置された複数のカメラ1の相対的な関係を把握するための把握方法であって、用意ステップと、取得ステップと、算出ステップと、を備える。前記用意ステップは、複数のマークとして、2行2列に配列された4つの貫通孔を少なくとも含むマーク群が同一の主面上の2ヶ所以上に形成された基準部材を用意する。前記取得ステップは、前記基準部材の異なる前記マーク群を前記複数のカメラ1により撮像して、前記4つの貫通孔の画像を少なくともそれぞれ含む複数の撮像画像Dを取得する。前記算出ステップは、前記複数の撮像画像D、及び前記複数のマークに関する情報に基づき、前記複数のカメラの相対的な関係を示す情報を算出する。
【選択図】図1
特許請求の範囲
【請求項1】
対象物の異なる部分を撮像するために設置された複数のカメラの相対的な関係を把握するための把握方法であって、
複数のマークとして、2行2列に配列された4つの貫通孔を少なくとも含むマーク群が同一の主面上の2ヶ所以上に形成された基準部材を用意する用意ステップと、
前記基準部材の異なる前記マーク群を前記複数のカメラにより撮像して、前記4つの貫通孔の画像を少なくともそれぞれ含む複数の撮像画像を取得する取得ステップと、
前記複数の撮像画像、及び前記複数のマークに関する情報に基づき、前記複数のカメラの相対的な関係を示す情報を算出する算出ステップと、
を備える把握方法。
続きを表示(約 2,200 文字)
【請求項2】
前記マークに関する情報は、前記基準部材上の前記マークの位置を示す位置情報を含み、
前記相対的な関係を示す情報は、
前記主面に沿う第1方向における、前記カメラの撮像範囲の位置を示す第1位置情報と、
前記第1方向に交わり、前記主面に沿う第2方向における前記撮像範囲の位置を示す第2位置情報と、
前記第1方向、及び前記第2方向に交わる第3方向の中心軸に対し、前記撮像範囲の回転角を示す第3回転情報と、
を含み、
前記算出ステップは、
前記撮像画像に含まれる前記複数のマークに対応する前記位置情報を特定し、
前記撮像画像毎に特定された前記位置情報に基づき、前記第1位置情報、前記第2位置情報、及び前記第3回転情報を、それぞれ前記撮像画像毎に算出する、
請求項1記載の把握方法。
【請求項3】
前記マークに関する情報は、前記基準部材上の前記複数のマークの位置関係を示す形状情報を含み、
前記相対的な位置関係を示す情報は、
前記主面に沿う第1方向の中心軸に対し、前記カメラの撮像範囲の回転角を示す第1回転情報と、
前記第1方向に交わり、前記主面に沿う第2方向の中心軸に対し、前記撮像範囲の回転角を示す第2回転情報と、
を含み、
前記算出ステップは、
前記撮像画像に含まれる前記複数のマークに対応する前記形状情報を特定し、
前記撮像画像毎に特定された前記形状情報に基づき、前記第1回転情報、及び前記第2回転情報を、それぞれ前記撮像画像毎に算出する、
請求項1記載の把握方法。
【請求項4】
前記マークに関する情報は、前記基準部材上の互いに近接する前記マーク間の距離を示す距離情報を含み、
前記相対的な位置関係を示す情報は、前記カメラの縮尺を示す縮尺情報を含み、
前記算出ステップは、
前記撮像画像に含まれる前記複数のマークに対応する前記距離情報を特定し、
前記撮像画像毎に特定された前記距離情報に基づき、前記カメラ毎に前記縮尺情報を算出する、
請求項1記載の把握方法。
【請求項5】
前記取得ステップのあと、前記相対的な関係を示す情報が算出された前記カメラを用いて、他の基準部材を撮像し、前記他の基準部材の配置状態を特定する全相対関係特定ステップをさらに備える、
請求項1~4の何れか1項記載の把握方法。
【請求項6】
前記複数のカメラにより前記対象物の異なる部分を撮像して、前記複数の撮像画像を取得する撮像ステップと、
前記対象物の前記複数の撮像画像、及び前記相対的な関係を示す情報に基づき、前記対象物における2点間の距離を計測する計測ステップと、
をさらに備える、
請求項1~4の何れか1項記載の把握方法。
【請求項7】
前記基準部材の形状は、平棒状を示し、
前記基準部材は、2つの前記マーク群を両端に有し、
前記取得ステップは、2つの前記カメラにより異なる前記マーク群を撮像して得られる2つの前記撮像画像を取得する、
請求項1~4の何れか1項記載の把握方法。
【請求項8】
前記基準部材の形状は、平板状を示し、
前記基準部材は、4つの前記マーク群を四隅に有し、
前記取得ステップは、4つの前記カメラにより異なる前記マーク群を撮像して得られる4つの前記撮像画像を取得する、
請求項1~4の何れか1項記載の把握方法。
【請求項9】
対象物の異なる部分を撮像するために設置された複数のカメラの相対的な関係を把握するための画像処理方法であって、
複数のマークとして、2行2列に配列された4つの貫通孔を少なくとも含むマーク群が同一の主面上の2ヶ所以上に形成された基準部材を撮像対象として、前記基準部材の異なる前記マーク群を前記複数のカメラにより撮像して得られた、前記4つの貫通孔の画像を少なくともそれぞれ含む複数の撮像画像を取得する取得ステップと、
前記複数の撮像画像、及び前記複数のマークに関する情報に基づき、前記複数のカメラの相対的な関係を示す情報を算出する算出ステップと、
を備える画像処理方法。
【請求項10】
対象物の異なる部分を撮像するために設置された複数のカメラの相対的な関係を把握するための画像処理プログラムであって、
コンピュータに、
複数のマークとして、2行2列に配列された4つの貫通孔を少なくとも含むマーク群が同一の主面上の2ヶ所以上に形成された基準部材を撮像対象として、前記基準部材の異なる前記マーク群を前記複数のカメラにより撮像して得られた、前記4つの貫通孔の画像を少なくともそれぞれ含む複数の撮像画像を取得する取得ステップと、
前記複数の撮像画像、及び前記複数のマークに関する情報に基づき、前記複数のカメラの相対的な関係を示す情報を算出する算出ステップと、
を実行させる画像処理プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、把握方法、画像処理方法、画像処理プログラム、画像処理装置、及び基準部材に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、対象物の異なる部分を撮像するために設置された複数のカメラの相対的な関係を把握する方法として、例えば特許文献1のカメラ設置位置検出装置等が提案されている。
【0003】
特許文献1では、複数のCCDカメラの設置位置を検出するための検出用治具、検出用治具に設けられた検出用マーク、検出用マークがCCDカメラの視野に収まる範囲内で、検出用治具の位置を変位させるテーブル、テーブルより検出用治具を変位させることにより、複数の異なる位置でCCDカメラが撮像した検出用マークに基づいて、CCDカメラの位置を算出するカメラ位置算出部を有するカメラ設置位置検出装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2010-282100号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、特許文献1では、各CCDカメラに対して1つの検出用マークを用いて、CCDカメラの位置を算出することを前提としている。このため、特許文献1の開示技術では、複数のCCDカメラの相対的な関係を高精度に把握することが難しい。
【0006】
そこで本発明は、上述した問題点に鑑みて案出されたものであり、その目的とするところは、複数のカメラの相対的な関係を高精度に把握することができる把握方法、画像処理方法、画像処理プログラム、画像処理装置、及び基準部材を提供することにある。
【課題を解決するための手段】
【0007】
第1発明に係る把握方法は、対象物の異なる部分を撮像するために設置された複数のカメラの相対的な関係を把握するための把握方法であって、複数のマークとして、2行2列に配列された4つの貫通孔を少なくとも含むマーク群が同一の主面上の2ヶ所以上に形成された基準部材を用意する用意ステップと、前記基準部材の異なる前記マーク群を前記複数のカメラにより撮像して、前記4つの貫通孔の画像を少なくともそれぞれ含む複数の撮像画像を取得する取得ステップと、前記複数の撮像画像、及び前記複数のマークに関する情報に基づき、前記複数のカメラの相対的な関係を示す情報を算出する算出ステップと、を備える。
【0008】
第2発明に係る把握方法は、第1発明において、前記マークに関する情報は、前記基準部材上の前記マークの位置を示す位置情報を含み、前記相対的な関係を示す情報は、前記主面に沿う第1方向における、前記カメラの撮像範囲の位置を示す第1位置情報と、前記第1方向に交わり、前記主面に沿う第2方向における前記撮像範囲の位置を示す第2位置情報と、前記第1方向、及び前記第2方向に交わる第3方向の中心軸に対し、前記撮像範囲の回転角を示す第3回転情報と、を含み、前記算出ステップは、前記撮像画像に含まれる前記複数のマークに対応する前記位置情報を特定し、前記撮像画像毎に特定された前記位置情報に基づき、前記第1位置情報、前記第2位置情報、及び前記第3回転情報を、それぞれ前記撮像画像毎に算出する。
【0009】
第3発明に係る把握方法は、第1発明において、前記マークに関する情報は、前記基準部材上の前記複数のマークの位置関係を示す形状情報を含み、前記相対的な位置関係を示す情報は、前記主面に沿う第1方向の中心軸に対し、前記カメラの撮像範囲の回転角を示す第1回転情報と、前記第1方向に交わり、前記主面に沿う第2方向の中心軸に対し、前記撮像範囲の回転角を示す第2回転情報と、を含み、前記算出ステップは、前記撮像画像に含まれる前記複数のマークに対応する前記形状情報を特定し、前記撮像画像毎に特定された前記形状情報に基づき、前記第1回転情報、及び前記第2回転情報を、それぞれ前記撮像画像毎に算出する。
【0010】
第4発明に係る把握方法は、第1発明において、前記マークに関する情報は、前記基準部材上の互いに近接する前記マーク間の距離を示す距離情報を含み、前記相対的な位置関係を示す情報は、前記カメラの縮尺を示す縮尺情報を含み、前記算出ステップは、前記撮像画像に含まれる前記複数のマークに対応する前記距離情報を特定し、前記撮像画像毎に特定された前記距離情報に基づき、前記カメラ毎に前記縮尺情報を算出する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
興和株式会社
顆粒
1か月前
興和株式会社
マスク
1か月前
興和株式会社
手用サポーター
2か月前
国立研究開発法人農業・食品産業技術総合研究機構
ミノムシの雌雄判別方法
4日前
個人
情報検索システム
10日前
キヤノン株式会社
電子機器
9日前
キヤノン株式会社
電子機器
9日前
キヤノン株式会社
電子機器
9日前
株式会社イノベイト
広告装置
12日前
キヤノン電子株式会社
通信システム
2日前
合同会社IPマネジメント
内部不正対策
17日前
トヨタ自動車株式会社
管理システム
4日前
トヨタ自動車株式会社
作業評価装置
2日前
TDK株式会社
等価回路
4日前
株式会社NURSY
再就職の支援装置
3日前
西松建設株式会社
計測システム
8日前
株式会社ヒニアラタ
障害者支援システム
17日前
個人
公益寄付インタラクティブシステム
2日前
個人
外国為替証拠金取引定期自動売買システム
15日前
大王製紙株式会社
作業管理システム
3日前
キオクシア株式会社
電子機器
8日前
株式会社セラク
営農支援システム及び方法
18日前
ジャペル株式会社
登録管理システム
8日前
サクサ株式会社
警備サービス管理システム
12日前
富士フイルム株式会社
タッチセンサ
2日前
株式会社インテック
触覚ディスプレイ装置
3日前
大和ハウス工業株式会社
概算システム
17日前
富士通株式会社
画像生成方法
1日前
株式会社デンソー
情報処理方法
2日前
個人
チャットボットを用いたシステム
8日前
株式会社デンソー
情報処理方法
10日前
キヤノン株式会社
画像処理方法
15日前
トヨタ自動車株式会社
車載コンピュータ
11日前
アスエネ株式会社
温室効果ガス排出量管理方法
8日前
トヨタ自動車株式会社
作業支援システム
10日前
日立建機株式会社
作業支援システム
4日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ