TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024110074
公報種別
公開特許公報(A)
公開日
2024-08-15
出願番号
2023014426
出願日
2023-02-02
発明の名称
作業車両
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/20 20060101AFI20240807BHJP(水工;基礎;土砂の移送)
要約
【課題】粒度の異なる掘削対象物を掘削する場合であっても作業効率の向上が可能な作業車両を提供する。
【解決手段】作業車両は、エンジンにより駆動される油圧ポンプ及び発電機と、油圧ポンプからの作動油により動作する油圧シリンダと、油圧シリンダにより動かされる作業装置と、発電機の発電電力により駆動され走行装置を動作させる電動機と、油圧シリンダの圧力を検出する圧力センサと、エンジンの出力を作業装置と走行装置に配分するための出力配分比を演算し、演算された出力配分比に基づいて油圧ポンプ及び電動機を制御する制御装置と、を備える。制御装置は、圧力センサの検出結果に基づいて、作業装置により掘削対象物の掘削を行っているときに作業装置に作用する反力の脈動の大きさを表す脈動値を演算し、演算された脈動値が大きいほど、作業装置の出力に対する走行装置の出力の比が大きくなるように、出力配分比を演算する。
【選択図】図5
特許請求の範囲
【請求項1】
車体に搭載されたエンジンと、
前記エンジンにより駆動される油圧ポンプと、
前記油圧ポンプから吐出される作動油により伸縮動作する油圧シリンダと、
前記油圧シリンダの伸縮動作に応じて動かされる作業装置と、
前記作業装置に対し独立して駆動され前記車体を走行させる走行装置と、
前記エンジンにより駆動されて発電する発電機と、
前記発電機により発電された電力により駆動され前記走行装置を動作させる電動機と、
前記油圧シリンダの圧力を検出する圧力センサと、
前記電動機の回転速度を検出する速度センサと、
前記電動機の電流を検出する電流センサと、
前記エンジンの出力を前記作業装置と前記走行装置に配分するための出力配分比を演算し、演算された前記出力配分比に基づいて前記油圧ポンプ及び前記電動機を制御する制御装置と、を備えた作業車両において、
前記制御装置は、
前記圧力センサ、前記速度センサ、及び前記電流センサの検出結果のうちの少なくとも一つに基づいて、前記作業装置により掘削対象物の掘削を行っているときに前記作業装置に作用する反力の脈動の大きさを表す脈動値を演算し、
演算された前記脈動値が大きいほど、前記作業装置の出力に対する前記走行装置の出力の比が大きくなるように、前記出力配分比を演算する
ことを特徴とする作業車両。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の作業車両において、
前記制御装置は、
前記速度センサの検出結果に基づいて、前記電動機の減速度を演算し、
演算された前記減速度が大きいほど、前記作業装置の出力に対する前記走行装置の出力の比が大きくなるように、前記出力配分比を演算する
ことを特徴とする作業車両。
【請求項3】
請求項2に記載の作業車両において、
前記作業装置の姿勢を検出する姿勢センサを備え、
前記制御装置は、
前記姿勢センサ、前記圧力センサ、及び前記速度センサの検出結果のうちの少なくとも一つに基づいて、前記掘削対象物に対して前記作業装置による掘削動作が開始されたか否かを判定し、
前記掘削動作が開始されたと判定された場合に、前記脈動値及び前記減速度に基づいて演算された前記出力配分比に基づいて、前記油圧ポンプ及び前記電動機を制御する
ことを特徴とする作業車両。
【請求項4】
請求項1に記載の作業車両において、
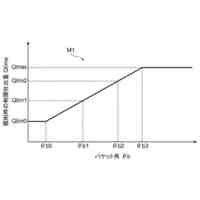
前記掘削対象物の粒度の大きさを表す複数の粒度レベルと前記脈動値との関係を規定する脈動閾値が記憶される記憶装置を備え、
前記制御装置は、
前記脈動閾値と、演算された前記脈動値とに基づいて、前記粒度レベルを演算し、
演算された前記粒度レベルに基づいて前記出力配分比を演算する
ことを特徴とする作業車両。
【請求項5】
請求項1に記載の作業車両において、
前記制御装置は、
前記脈動値が予め定められた脈動閾値以上である場合には、前記作業装置の出力に対する前記走行装置の出力の比が1よりも大きくなるように、前記出力配分比を演算し、
前記脈動値が前記脈動閾値未満である場合には、前記作業装置の出力に対する前記走行装置の出力の比が1以下になるように、前記出力配分比を演算する
ことを特徴とする作業車両。
【請求項6】
請求項2に記載の作業車両において、
前記制御装置は、
掘削量の大きさを表す複数の掘削量レベルと前記減速度との関係を規定する減速度閾値が記憶される記憶装置を備え、
前記制御装置は、
前記減速度閾値と、演算された前記減速度とに基づいて、前記掘削量レベルを演算し、
演算された前記掘削量レベルに基づいて前記出力配分比を演算する
ことを特徴とする作業車両。
【請求項7】
請求項2に記載の作業車両において、
前記制御装置は、
前記減速度が予め定められた減速度閾値以上である場合には、前記作業装置の出力に対する前記走行装置の出力の比が1よりも大きくなるように、前記出力配分比を演算し、
前記減速度が前記減速度閾値未満である場合には、前記作業装置の出力に対する前記走行装置の出力の比が1以下になるように、前記出力配分比を演算する
ことを特徴とする作業車両。
【請求項8】
請求項2に記載の作業車両において、
前記掘削対象物の粒度の大きさを表す複数の粒度レベルと前記脈動値との関係を規定する脈動閾値と、掘削量の大きさを表す複数の掘削量レベルと前記減速度との関係を規定する減速度閾値と、が記憶される記憶装置を備え、
前記制御装置は、
前記脈動閾値と、演算された前記脈動値とに基づいて、前記粒度レベルを演算し、
前記減速度閾値と、演算された前記減速度とに基づいて、前記掘削量レベルを演算し、
演算された前記粒度レベル及び前記掘削量レベルの双方に基づいて、前記出力配分比を演算する
ことを特徴とする作業車両。
【請求項9】
請求項1に記載の作業車両において、
前記脈動値に基づいて、前記出力配分比を演算する第1制御モードと、前記脈動値にかかわらず、前記出力配分比を演算する第2制御モードと、を手動で切り替え可能なモード切替操作装置をさらに備える
ことを特徴とする作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
車体を移動させるための走行装置と、土砂等を掘削するためのバケット及びリフトアームを有する作業装置とを備えた作業車両が知られている(特許文献1参照)。このような作業車両では、掘削した土砂等をダンプトラックなどの運搬車両へ運搬し、積み込む作業を行う。掘削、運搬、積込を含む一連の作業の効率は、作業車両の性能を示す一つの指標となる。作業車両による作業効率は、例えば、一連の作業において、単位時間当たりに運搬車両に積み込まれる運搬物(掘削物)の重量[ton/h]に相当する。つまり、作業効率は、その値が大きいほど短時間でより多くの物量を掘削、運搬できることを意味する。
【先行技術文献】
【特許文献】
【0003】
特開2021-95710号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような作業車両では、エンジンの動力(出力)を走行装置と作業装置に分配して掘削作業を行う。このとき、走行駆動力が小さく作業駆動力が大きすぎると、土砂にバケットを十分に貫入させることができなかったり、バケットに土砂が十分に入る前にバケットが持ち上げられたりするため、作業効率が低下する。一方、走行駆動力が大きく作業駆動力が小さすぎると、バケットを持ち上げるのに時間を要するため、作業効率が低下する。作業効率を向上するためには、走行駆動力と作業駆動力の動力配分(出力配分)を適切に行うことが有効である。
【0005】
掘削対象物は、掘削場所によって粒度が異なる。このため、粒度の異なる掘削対象物の掘削作業において、走行駆動力と作業駆動力に対するエンジンの出力配分比を同じように設定してしまうと、作業効率が低下するおそれがある。例えば、粒度の大きい掘削対象物では、粒度の小さい掘削対象物に比べてバケットを貫入させにくく、大きな走行駆動力を要する。このため、粒度の小さい掘削対象物を掘削する場合の作業効率が良好であっても、粒度の大きい掘削物を掘削する場合の作業効率が悪化してしまうおそれがある。
【0006】
本発明は、粒度の異なる掘削対象物を掘削する場合であっても作業効率の向上が可能な作業車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様による作業車両は、車体に搭載されたエンジンと、前記エンジンにより駆動される油圧ポンプと、前記油圧ポンプから吐出される作動油により伸縮動作する油圧シリンダと、前記油圧シリンダの伸縮動作に応じて動かされる作業装置と、前記作業装置に対し独立して駆動され前記車体を走行させる走行装置と、前記エンジンにより駆動されて発電する発電機と、前記発電機により発電された電力により駆動され前記走行装置を動作させる電動機と、前記油圧シリンダの圧力を検出する圧力センサと、前記電動機の回転速度を検出する速度センサと、前記電動機の電流を検出する電流センサと、前記エンジンの出力を前記作業装置と前記走行装置に配分するための出力配分比を演算し、演算された前記出力配分比に基づいて前記油圧ポンプ及び前記電動機を制御する制御装置と、を備える。前記制御装置は、前記圧力センサ、前記速度センサ、及び前記電流センサの検出結果のうちの少なくとも一つに基づいて、前記作業装置により掘削対象物の掘削を行っているときに前記作業装置に作用する反力の脈動の大きさを表す脈動値を演算し、演算された前記脈動値が大きいほど、前記作業装置の出力に対する前記走行装置の出力の比が大きくなるように、前記出力配分比を演算する。
【発明の効果】
【0008】
本発明によれば、粒度の異なる掘削対象物を掘削する場合であっても作業効率の向上が可能な作業車両を提供することができる。
【図面の簡単な説明】
【0009】
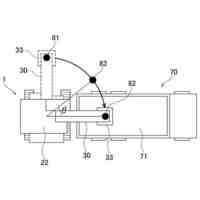
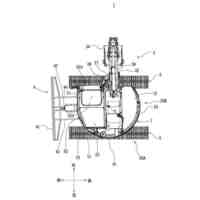
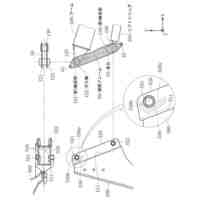
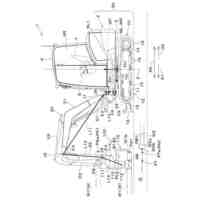
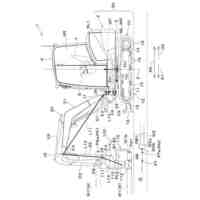
図1は、ホイールローダの側面図である。
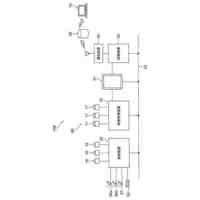
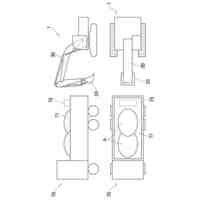
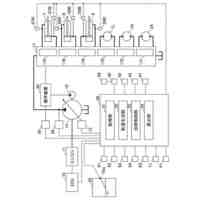
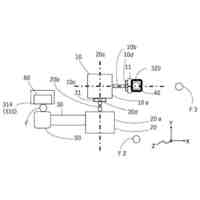
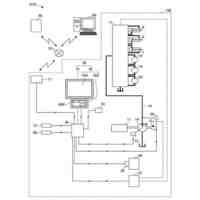
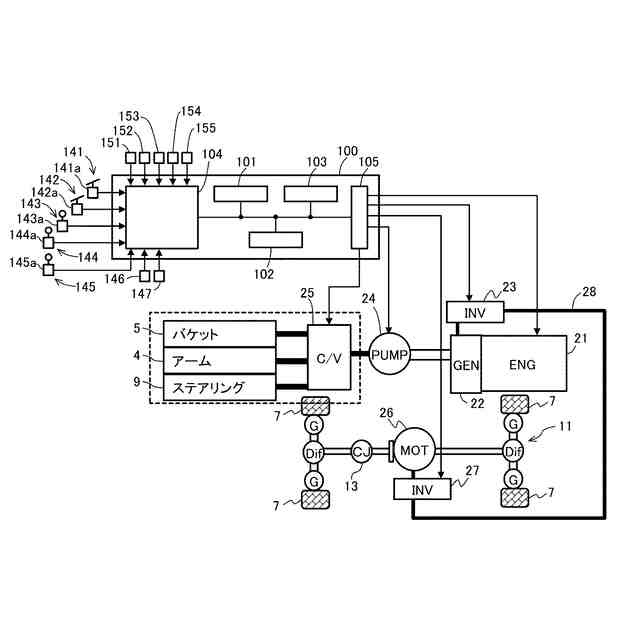
図2は、ホイールローダのシステム構成図である。
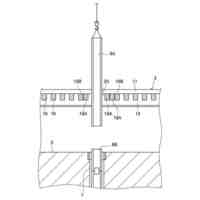
図3は、ホイールローダのV字掘削作業(Vシェープローディング)を説明するための図である。
図4は、掘削作業の動作の概要を説明する図である。
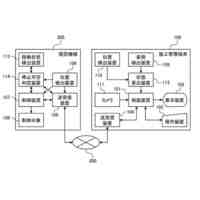
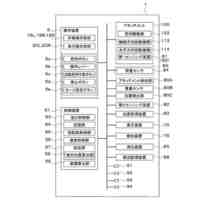
図5は、本実施形態に係る制御装置の機能ブロック図である。
図6は、掘削動作判定部の制御ブロック線図である。
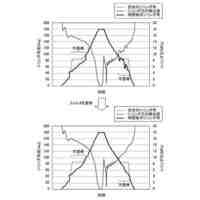
図7は、バケットシリンダ圧の時間変化について示す模式図である。
図8は、粒度レベル判定部112cの制御ブロック線図である。
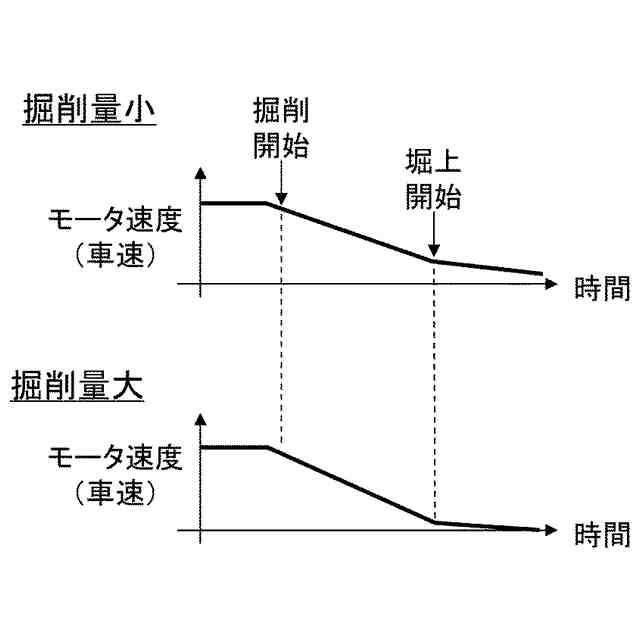
図9は、モータ速度(車速)の時間変化について示す模式図である。
図10は、掘削量レベル判定部の制御ブロック線図である。
図11は、本実施形態に係る掘削状態判定部による掘削状態判定処理について説明する図である。
図12は、変形例2に係る掘削状態判定部による掘削状態判定処理について説明する図である。
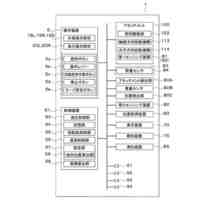
図13は、変形例3に係る制御装置の機能ブロック図である。
【発明を実施するための形態】
【0010】
図面を参照して、本発明の実施形態に係る作業車両について説明する。なお、本実施形態では、作業車両が電動駆動システムを備えたホイールローダである例について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業車両
22日前
日立建機株式会社
作業機械の稼働現場管理システム
1か月前
日立建機株式会社
窒化鋼部品及び窒化鋼部品の製造方法
2か月前
日立建機株式会社
建設機械の動作制御システム
1か月前
個人
エア津波緩衝装置
1か月前
個人
指示装置
1か月前
株式会社クボタケミックス
桝蓋
1か月前
住友建機株式会社
ショベル
28日前
株式会社ジェック
水流方向切替装置
今日
コベルコ建機株式会社
作業機械
1か月前
住友重機械工業株式会社
作業機械
1か月前
個人
鋼管杭とその製造方法
1か月前
住友重機械工業株式会社
作業機械
7日前
鹿島建設株式会社
建込み方法
20日前
コベルコ建機株式会社
作業機械
1か月前
コベルコ建機株式会社
作業機械
1か月前
個人
アンカーボルト支持装置
29日前
ヤンマーホールディングス株式会社
作業機械
1か月前
ジーネットワーク株式会社
低空頭FRP.Tube合成杭
29日前
住友重機械工業株式会社
作業機械の制御装置
1か月前
スーパーレジンクラフト株式会社
防塵板付消波装置
28日前
日鉄建材株式会社
透過型砂防堰堤の設計方法
今日
日立建機株式会社
作業車両
22日前
三陽機器株式会社
作業機の作業部連結構造
22日前
株式会社日立建機ティエラ
建設機械
今日
株式会社竹中工務店
山留め工法
1か月前
株式会社竹中工務店
山留め工法
1か月前
日特建設株式会社
基盤材処理システム
1か月前
ニシオホールディングス株式会社
作業機械用操作装置
1か月前
小岩金網株式会社
布団篭の本体パネル及び布団篭
1か月前
ジャパンパイル株式会社
回転埋設杭
29日前
株式会社クボタ
作業機および作業機の制御方法
6日前
株式会社クボタ
作業機および作業機の制御方法
6日前
株式会社クボタ
作業機および作業機の制御方法
6日前
住友重機械工業株式会社
作業機械及び作業支援システム
1か月前
株式会社クボタ
作業機および作業機の制御方法
6日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ