TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025003160
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103673
出願日
2023-06-23
発明の名称
作業機および作業機の制御方法
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
E02F
3/43 20060101AFI20241226BHJP(水工;基礎;土砂の移送)
要約
【課題】把持対象物を把持するアタッチメントを用いて作業を行う際の安全性を向上させる
【解決手段】作業機1は、機体2と、機体2に設けられた作業装置20とを有し、作業装置20に把持対象物を把持するアタッチメント100を取付可能な作業機1であって、アタッチメント100によって把持対象物を把持する作業を行う場合に、作業機1の作業範囲および作業速度の一方または両方を制限する作業制限を行う制御装置51を備える。
【選択図】図7A
特許請求の範囲
【請求項1】
機体と、前記機体に設けられた作業装置とを有し、前記作業装置に把持対象物を把持するアタッチメントを取付可能な作業機であって、
前記アタッチメントによって把持対象物を把持する作業を行う場合に、前記作業機の作業範囲および作業速度の一方または両方を制限する作業制限を行う制御装置を備えている作業機。
続きを表示(約 1,100 文字)
【請求項2】
前記アタッチメントによる把持対象物の把持を検出する検出部を備え、
前記制御装置は、前記検出部にて前記把持対象物の把持が検出された場合に前記作業制限を行う請求項1に記載の作業機。
【請求項3】
前記検出部は、前記作業装置に作用する荷重を検出する荷重センサを有し、前記荷重が前記把持対象物を把持していない状態よりも所定以上重くなったか否かにより前記把持対象物の把持を検出する請求項2に記載の作業機。
【請求項4】
前記作業装置に前記アタッチメントが取り付けられていることを検出、または前記アタッチメントを用いる作業モードである把持作業モードの選択指示を検出するアタッチメント検出部を備え、
前記制御装置は、前記アタッチメント検出部によって前記アタッチメントが取り付けられていることが検出された場合、または把持作業モードの選択指示が検出された場合に前記作業制限を行う請求項1に記載の作業機。
【請求項5】
前記検出部は、前記アタッチメントに対する把持動作の実行指示を検出し、
前記制御装置は、前記検出部にて前記実行指示が検出された場合に前記作業制限を行う請求項2に記載の作業機。
【請求項6】
前記アタッチメントは、前記把持動作を行うための油圧アクチュエータを備え、
前記検出部は、前記実行指示の有無を、前記油圧アクチュエータに供給される作動油の圧力又は前記油圧アクチュエータに作動油を供給する制御弁への制御信号に基づいて判定する請求項5に記載の作業機。
【請求項7】
前記アタッチメントが把持している把持対象物を認識する第1センシング装置を備え、
前記検出部は、前記第1センシング装置の認識結果に基づいて把持対象物の把持を検出する請求項2に記載の作業機。
【請求項8】
前記アタッチメントにより前記把持対象物を把持する作業を行う把持モードと、吊り作業を行うクレーンモードとを切換可能であり、
前記クレーンモードでは前記作業制限を行わないか、或いは、前記把持モードにおける前記作業制限の程度を前記クレーンモードにおける前記作業制限よりも大きくする請求項1に記載の作業機。
【請求項9】
前記把持対象物の重量を検出する重量センサを有し、
前記制御装置は、前記アタッチメントが把持している把持対象物の重量に応じて前記作業制限の程度を変更する請求項1に記載の作業機。
【請求項10】
前記アタッチメントの高さ位置を検出する位置検出部を備え、
前記制御装置は、前記アタッチメントの高さ位置に応じて前記作業制限の程度を変更する請求項1に記載の作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機および作業機の制御方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1に開示された作業機は、下部走行体と、上部旋回体と、上部旋回体に設けられた作業装置とを備えている。作業装置は、上下方向に揺動可能なブームと、ブームの先端部に設けられ、且つ、前後方向又は上下方向に揺動可能なアームと、アーム先端部に接続され、且つ、管を把持する管接合用アタッチメントとを備えている。この作業機では、操作者による操作によって、管接合用アタッチメントにて管が把持され、把持している管が、地中の溝内に配置された被接合管に接合される。
【先行技術文献】
【特許文献】
【0003】
特開2023-62320号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の作業機では、管接合用アタッチメントが管を把持している状態では、バケット等のアタッチメントを用いて作業している状態よりも安定性が低下する可能性がある。
【0005】
本発明は、このような従来技術の問題点を解決すべくなされたものであって、把持対象物を把持するアタッチメントを用いて作業を行う際の安全性を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る作業機は、機体と、前記機体に設けられた作業装置とを有し、前記作業装置に把持対象物を把持するアタッチメントを取付可能な作業機であって、前記アタッチメントによって把持対象物を把持する作業を行う場合に、前記作業機の作業範囲および作業速度の一方または両方を制限する作業制限を行う制御装置を備えている。
【発明の効果】
【0007】
上記作業機によれば、把持対象物を把持するアタッチメントを用いて作業を行う際の安全性を向上させることができる。
【図面の簡単な説明】
【0008】
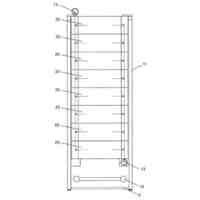
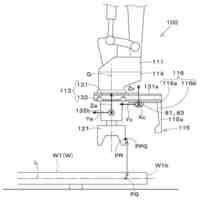
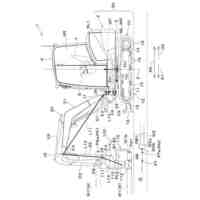
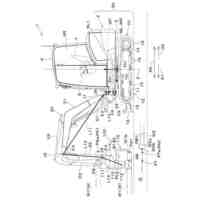
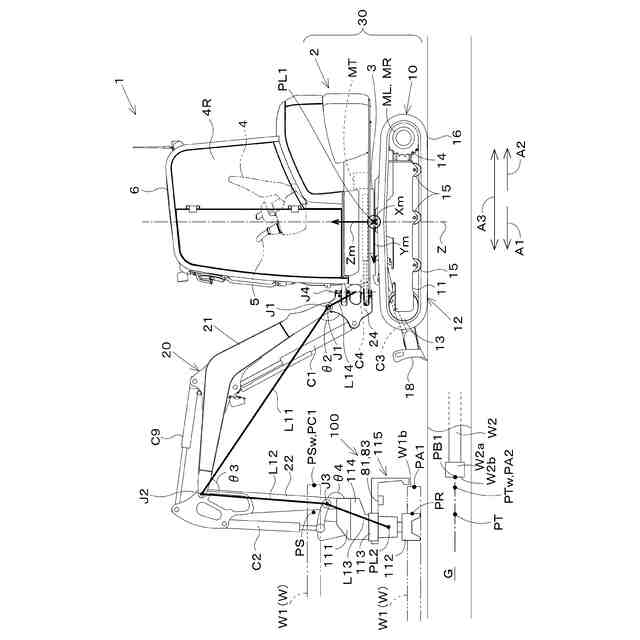
作業機の全体側面図である。
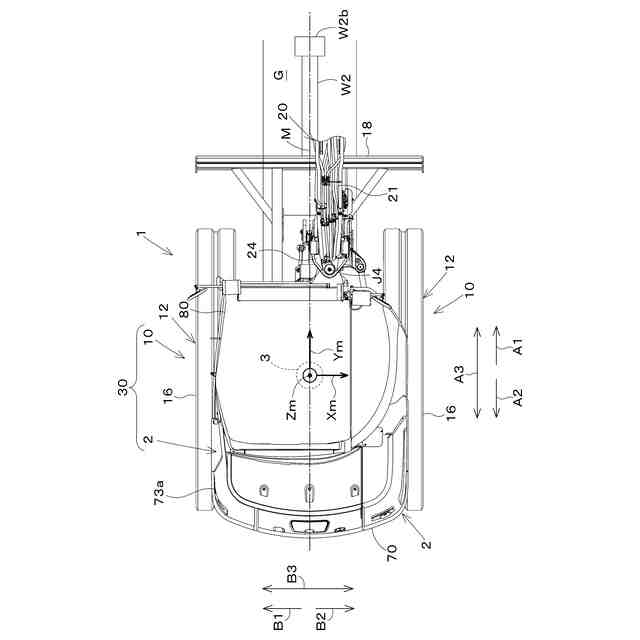
作業機の作業装置の一部を省略した平面図である。
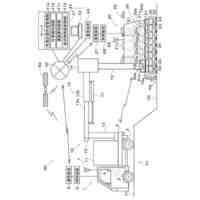
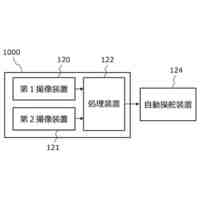
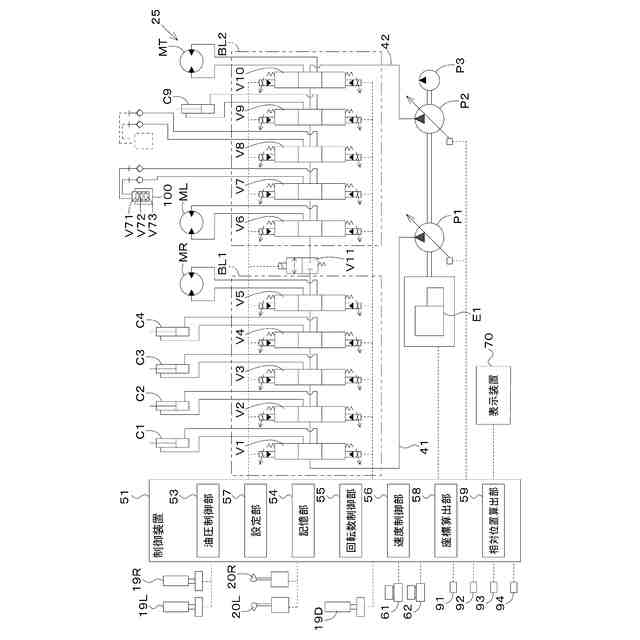
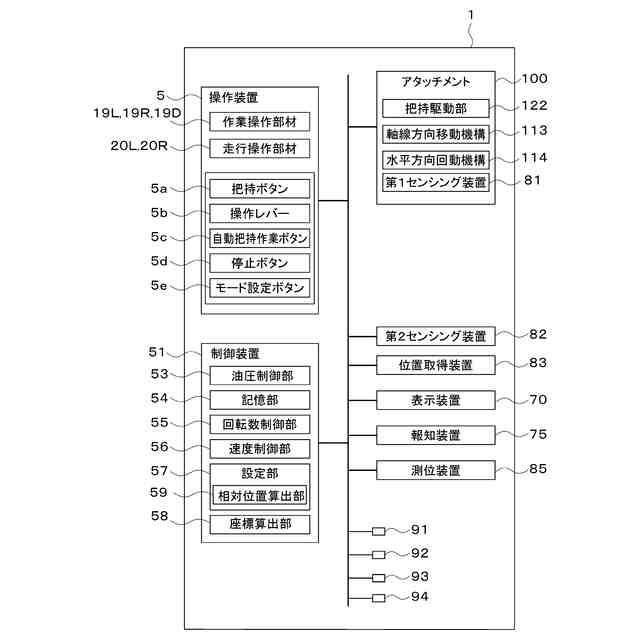
作業機の油圧システム及び制御システムの概略構成図である。
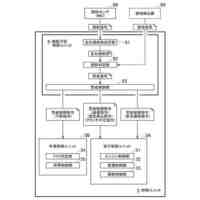
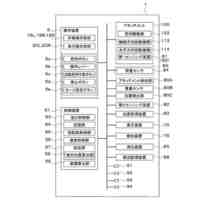
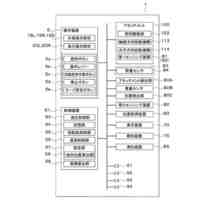
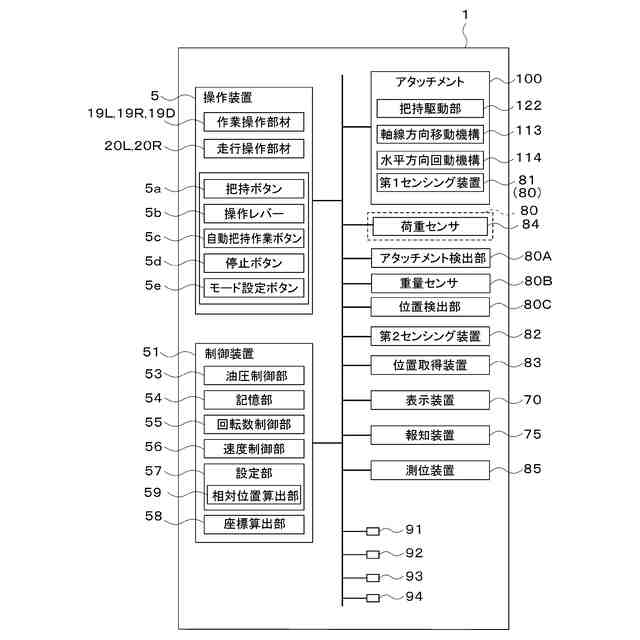
第1実施形態の作業機の電気ブロック図である。
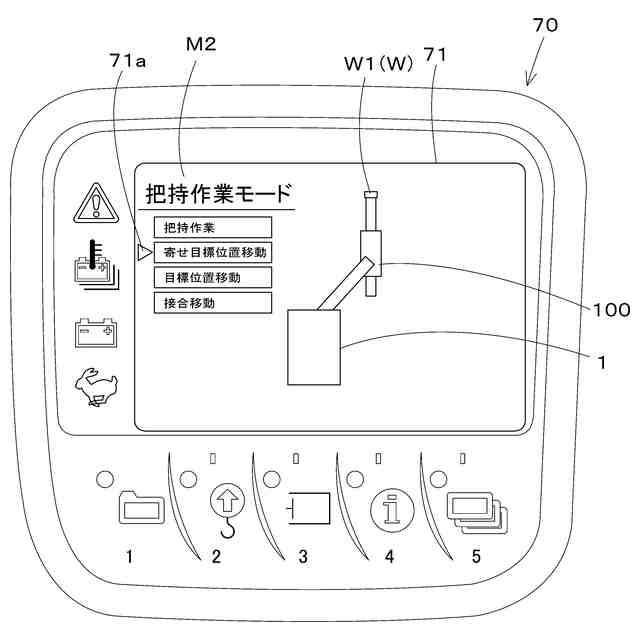
表示装置の表示例を示す図である。
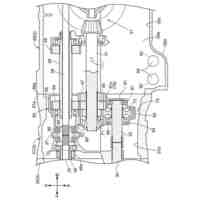
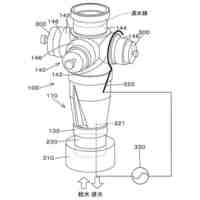
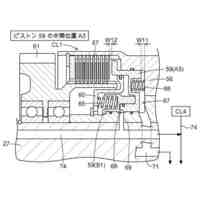
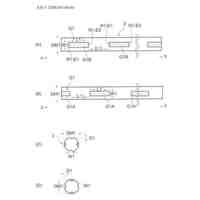
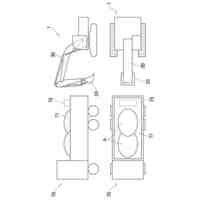
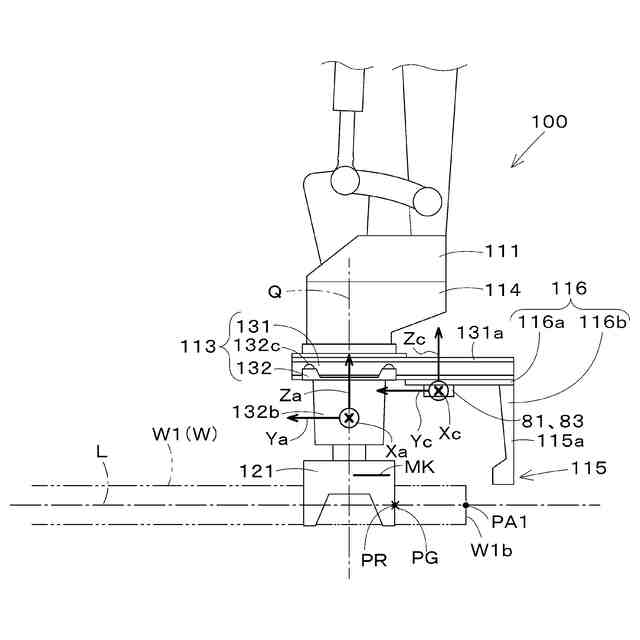
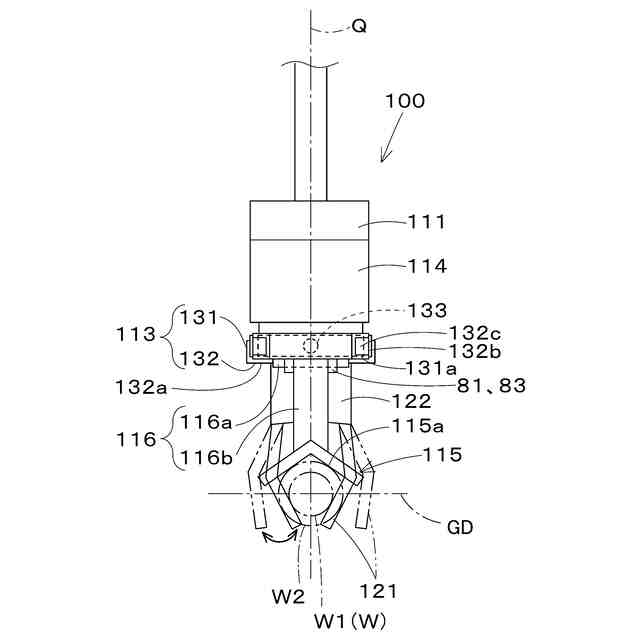
管接合用のアタッチメントを幅方向の一方から見た図である。
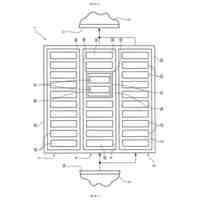
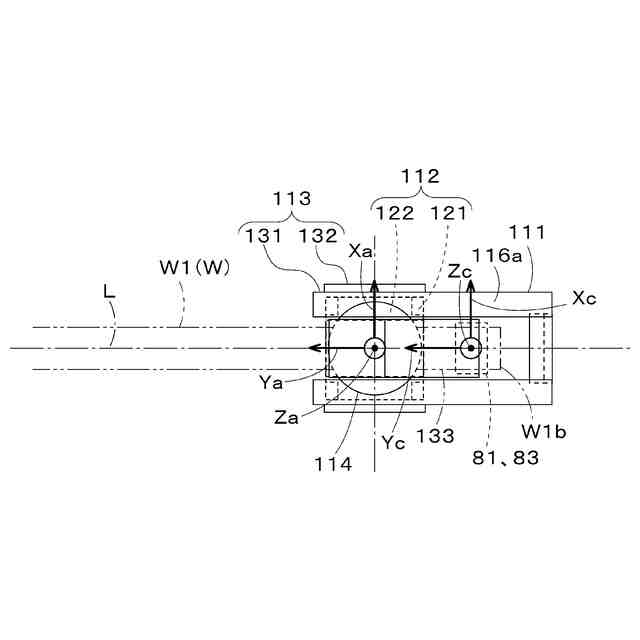
管接合用のアタッチメントの平面図である。
管接合用のアタッチメントを軸線方向の一方から見た図である。
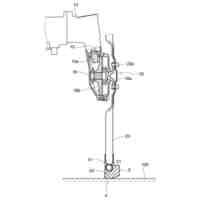
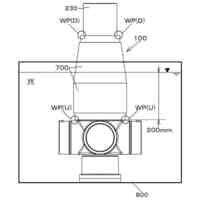
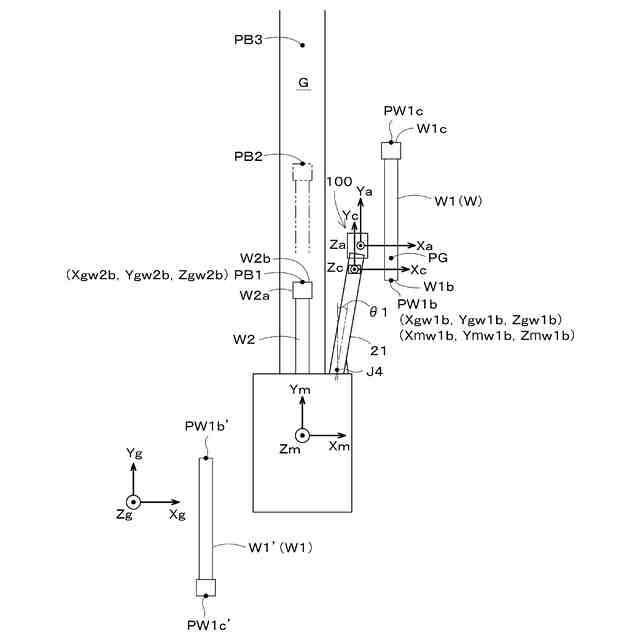
各種の座標系及び管接合用のアタッチメントによる管の把持接合作業を説明するための図である。
管を被接合管に接合した状態を示す図である。
管接合用のアタッチメントを把持前位置に位置させた状態を示す図である。
把持前位置において把持部の向きが調整されることを示す図である。
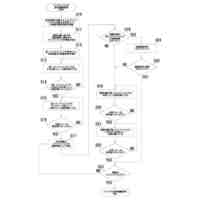
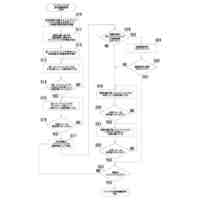
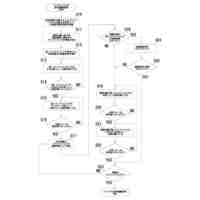
作業機による管接合用のアタッチメントの自動把持接合処理の一例を示すフローチャートである。
管の把持制御の一例を示すフローチャートである。
把持位置への移動制御の一例を示すフローチャートである。
把持している管の作業開始位置制御の一例を示すフローチャートである。
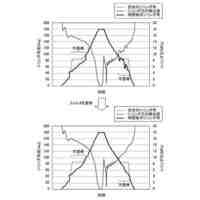
フロントの各部材の速度制御の一例を示すフローチャートである。
把持している管の接合開始位置制御の一例を示すフローチャートである。
フロントの各部材の速度制御の一例を示すフローチャートである。
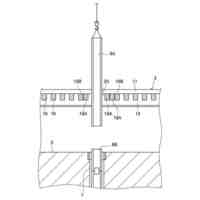
管接合用のアタッチメントが把持している管を作業開始位置から接合開始位置に移動させる様子を示す図である。
管接合用のアタッチメントが把持している管が接合開始位置に位置した様子を示す図である。
管接合用のアタッチメントが把持している管を被接合管に接合させた様子を示す図である。
第2実施形態の作業機の電気ブロック図である。
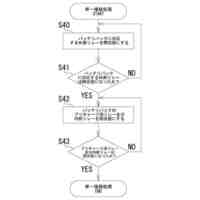
第2実施形態における管の把持中の作業制限処理の一例を示すフローチャートである。
記憶テーブルの一例を示す図である。
記憶テーブルの一例を示す図である。
記憶テーブルの一例を示す図である。
記憶テーブルの一例を示す図である。
記憶テーブルの一例を示す図である。
記憶テーブルの一例を示す図である。
第3実施形態の作業機の電気ブロック図である。
第3実施形態における管の把持中の周辺監視処理の一例を示すフローチャートである。
管の位置検出処理の一例を示すフローチャートである。
管の周辺の対象検出処理の一例を示すフローチャートである。
把持中の管とその周辺の対象との相対位置に基づいて作業機の周辺に設定された許可範囲を説明するための図である。
表示装置における相対位置情報の表示例を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の一実施形態について、図面を参照しながら説明する。
【0010】
[第1実施形態]
まず、作業機1の全体構成について説明する。図1Aは、作業機の全体側面図である。図1Bは、作業機の作業装置の一部を省略した平面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
多層管
15日前
株式会社クボタ
作業車
15日前
株式会社クボタ
水田作業車
22日前
株式会社クボタ
水田作業車
22日前
株式会社クボタ
膜分離装置
16日前
株式会社クボタ
水処理装置
3日前
株式会社クボタ
水処理装置
3日前
株式会社クボタ
粒状物供給システム
3日前
株式会社クボタ
塗装方法及び塗装系
2日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
列検出システムおよび農業機械
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタケミックス
排水集合管および排水集合管の製造方法
17日前
株式会社クボタ
水処理施設の更新方法および膜分離装置
1日前
株式会社クボタケミックス
排水集合管および排水集合管の製造方法
16日前
株式会社クボタ
油圧クラッチ及び走行用の伝動装置及び作業車
1日前
株式会社クボタ
作業機
1日前
株式会社クボタ
トラクタ
15日前
株式会社クボタケミックス
排水集合管および排水集合管の製造方法
17日前
個人
エア津波緩衝装置
1か月前
個人
指示装置
29日前
株式会社クボタケミックス
桝蓋
29日前
住友建機株式会社
ショベル
23日前
コベルコ建機株式会社
作業機械
1か月前
個人
鋼管杭とその製造方法
29日前
住友重機械工業株式会社
作業機械
2日前
住友重機械工業株式会社
作業機械
29日前
鹿島建設株式会社
建込み方法
15日前
コベルコ建機株式会社
作業機械
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ