TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025000326
公報種別
公開特許公報(A)
公開日
2025-01-07
出願番号
2023100125
出願日
2023-06-19
発明の名称
粒状物供給システム
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01C
15/00 20060101AFI20241224BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】運搬車から作業機に搭載される容器に効率的に粒状物を供給できる粒状物供給システムを提供する。
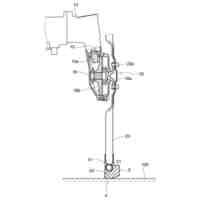
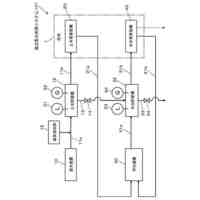
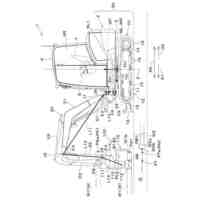
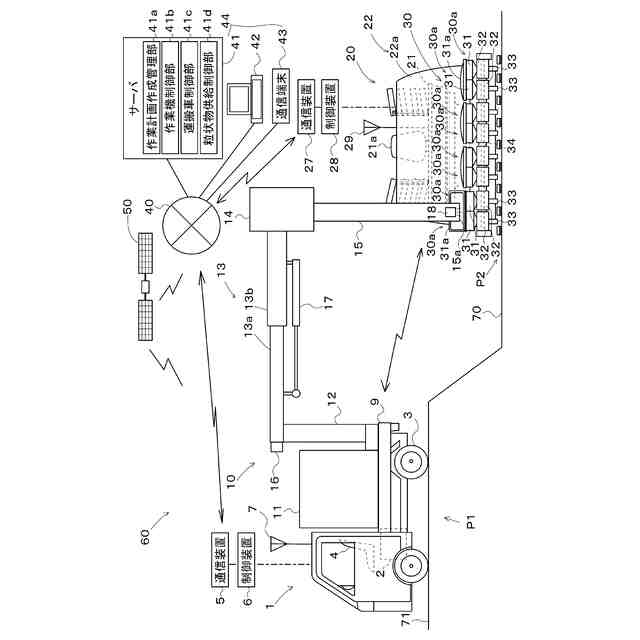
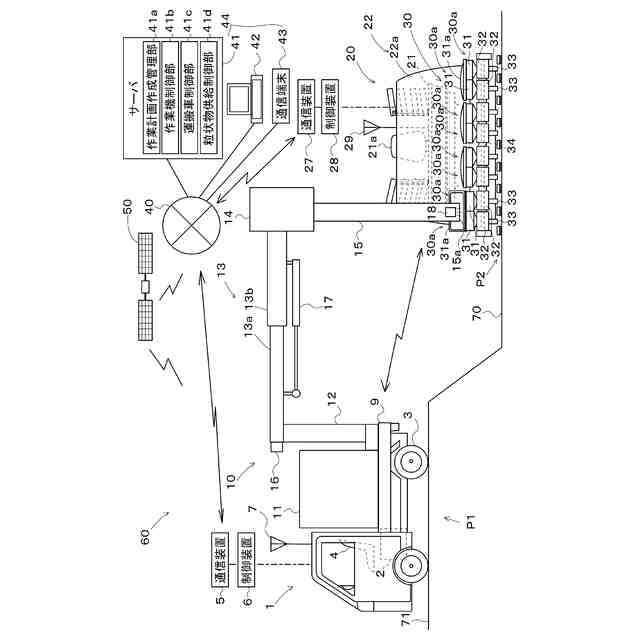
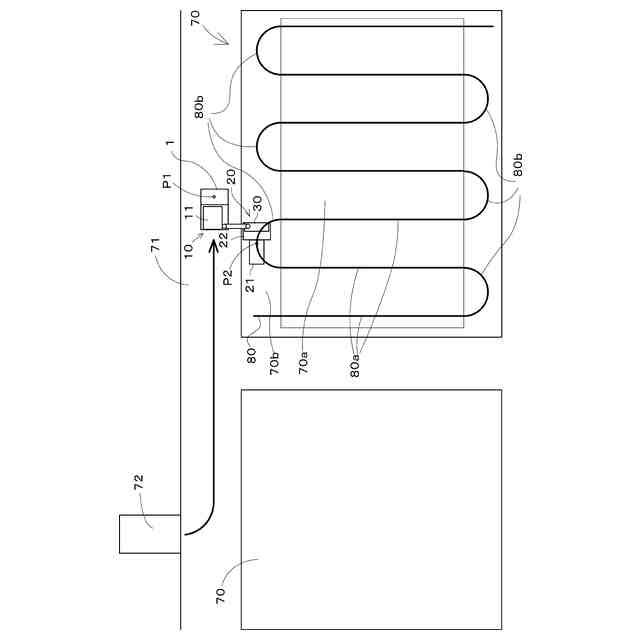
【解決手段】 粒状物を圃場に散布する作業機が備える粒状物貯留用の容器に供給される粒状物を運搬する運搬車と、前記運搬車に搭載され、排出口を有し、前記排出口より粒状物を前記作業機の前記容器に排出する粒状物供給装置と、前記粒状物供給装置を制御する粒状物供給制御部と、を備えている。前記粒状物供給制御部は、前記排出口を、前記粒状物を前記容器へ向けて排出するための目標排出口位置に配置し、その後に前記排出口より粒状物を前記容器へと排出するよう、前記粒状物供給装置を制御する。
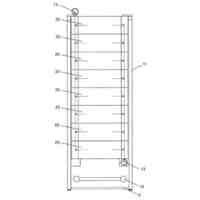
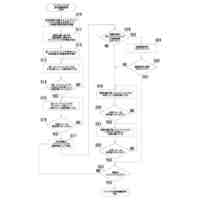
【選択図】図1
特許請求の範囲
【請求項1】
粒状物を圃場に散布する作業機が備える粒状物貯留用の容器に供給される粒状物を運搬する運搬車と、
前記運搬車に搭載され、排出口を有し、前記排出口より粒状物を前記作業機の前記容器に排出する粒状物供給装置と、
前記粒状物供給装置を制御する粒状物供給制御部と、を備えており、
前記粒状物供給制御部は、前記排出口を、前記容器へ向けて粒状物を排出するための目標排出口位置に配置し、その後に前記排出口より粒状物を前記容器へと排出するよう、前記粒状物供給装置を制御する粒状物供給システム。
続きを表示(約 1,200 文字)
【請求項2】
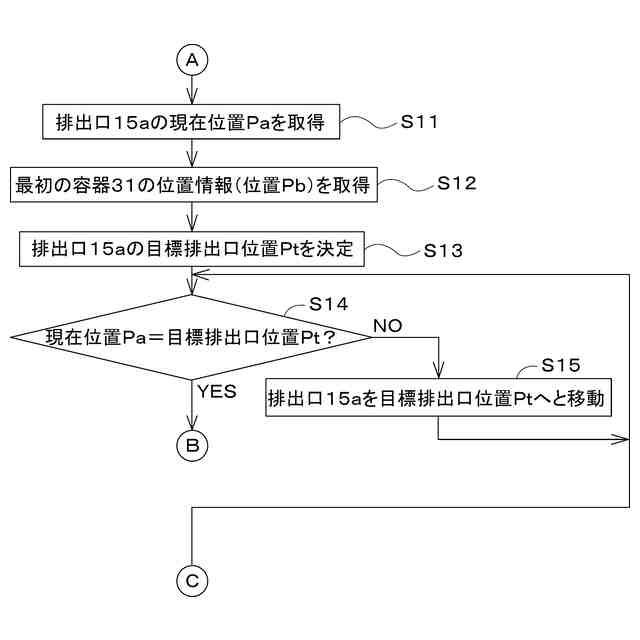
前記粒状物供給制御部は、前記作業機の前記容器の位置を示す容器位置情報を取得可能であり、取得した前記容器位置情報に基づき、前記目標排出口位置を決定する請求項1に記載の粒状物供給システム。
【請求項3】
前記粒状物供給装置は、前記排出口までの粒状物搬送路を伸縮可能に構成されており、
前記粒状物供給制御部は、前記粒状物搬送路を伸縮して、前記排出口を前記目標排出口位置に配置する請求項1又は2に記載の粒状物供給システム。
【請求項4】
前記作業機において前記容器が複数並設されている場合、前記粒状物供給制御部は、各前記容器について前記目標排出口位置を決定し、各前記目標排出口位置に前記排出口を配置するために前記粒状物搬送路を伸縮させる請求項3に記載の粒状物供給システム。
【請求項5】
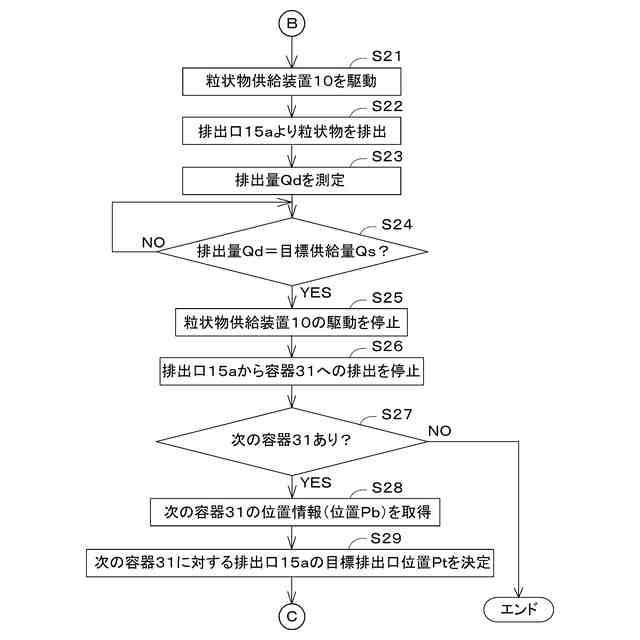
前記粒状物供給制御部は、前記作業機の前記圃場への粒状物散布についての作業計画情報を取得可能であり、前記作業計画情報に基づき、前記粒状物供給装置から前記容器への粒状物の目標供給量を決定する請求項1又は2に記載の粒状物供給システム。
【請求項6】
前記作業機、前記運搬車、及び前記粒状物供給装置のうちの少なくとも一つが、前記排出口からの粒状物の排出量を測定可能であり、
前記粒状物供給制御部は、測定された前記排出量を取得可能であり、前記粒状物供給装置にて前記作業機の前記容器への粒状物の排出を行っているときに、前記排出量が前記目標供給量に達すると、前記排出口からの粒状物の排出を停止する請求項5に記載の粒状物供給システム。
【請求項7】
前記運搬車及び前記作業機のうち少なくとも一方の自動走行又は遠隔操縦による走行のための支援装置を備え、
前記支援装置は、前記粒状物供給制御部を含む請求項1又は2に記載の粒状物供給システム。
【請求項8】
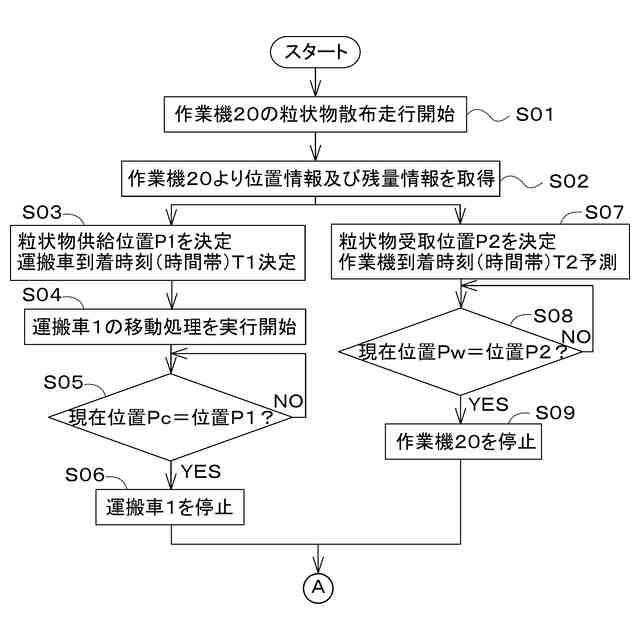
前記運搬車の移動に関する処理を実行する運搬車制御部を備え、
前記運搬車制御部は、前記粒状物供給装置にて前記作業機の前記容器に粒状物を供給するために前記運搬車が停車すべき粒状物供給位置を決定する請求項1又は2に記載の粒状物供給システム。
【請求項9】
前記運搬車制御部は、前記粒状物供給位置を決定すると、前記運搬車を前記粒状物供給位置まで移動させるための処理を実行する請求項8に記載の粒状物供給システム。
【請求項10】
前記作業機は、圃場への粒状物の散布作業をしている間、前記容器内の粒状物の残量を経時的に測定可能であり、
前記運搬車制御部は、経時的に測定された前記作業機の前記容器内の粒状物の残量を示
す残量情報を取得可能であり、取得した前記残量情報に基づき、前記粒状物供給位置を決定する請求項8に記載の粒状物供給システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、粒状物を圃場に散布する作業機が備える粒状物貯留用の容器に粒状物を供給するための粒状物供給システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
例えば特許文献1に開示される運搬車は、田植機(作業機)が備える肥料(粒状物)貯留用の容器に供給される粒状物を運搬する。この運搬車は、肥料供給装置を備えている。運搬車は、田植機の近傍にて停止し、肥料供給装置が、肥料である粒状物を運搬車から田植機の備える容器へと供給するのに用いられる。
【0003】
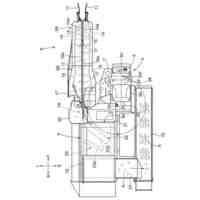
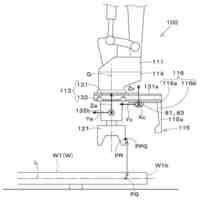
前記肥料供給装置は、運搬車に設置されるホッパからの肥料を上方に搬送するため上下方向に延びる昇降搬送装置と、昇降搬送装置の上端より水平方向に延びる水平方向搬送装置と、水平方向搬送体の終端部に備えられる排出シュートとを有する。排出シュートの下端に排出口が開口しており、排出口より肥料を排出し、容器へと供給する構造となっている。
【0004】
また、例えば特許文献2に開示される農作業支援システムでは、管理者にて作成された作業計画に関する情報を、農作業者が、自己の通信端末にて受信することで、作業計画に含まれている圃場への散布剤の予定散布量に関する情報を取得可能である。農作業者は、取得した予定散布量についての情報を、散布剤の散布作業を行うトラクタ等の農作業車両へと送信する。農作業車両(の演算部)は、作業走行中に、走行距離をカウントすることで、実際にどれだけの量の散布剤を散布したかを演算し、搭載している容器内の散布剤の残量を把握することができるので、予定散布量を達成できるかどうか等を判断することもできる。
【先行技術文献】
【特許文献】
【0005】
特許第3938713号公報
特開2022-161972号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の肥料供給装置において、水平方向搬送装置が昇降搬送装置に対して上下に回動可能であることで、排出口の上下位置を調整可能ではあるが、昇降搬送装置及び水平方向搬送装置にて構成される搬送路の長さは固定されている(収納時に水平方向搬送装置を折りたためることを除く)。したがって、排出口と容器との位置合わせ時には、田植機又は運搬車を移動させなければならないものと思われる。
【0007】
また、田植機も運搬車も自動走行や遠隔操縦により走行するものではなく、肥料供給装置による肥料の搬送も、作業者が排出口から排出される肥料や容器の状態等を見ながらのモータの切換操作によるものとなっている。
【0008】
また、特許文献2の農作業支援システムにおいては、農作業者等が、農作業車両に搭載される容器内の散布剤の残量と予定散布量との関係を把握できるので、例えば、どの地点で残量が0になって、散布作業完了までにあとどれだけの量の散布剤を補給すべきか等の判断が可能である。しかし、農作業車両の容器に補給される散布剤を運搬する運搬車の移動に関する制御までは考慮されていない。
【0009】
本発明は、運搬車から作業機に備えられる容器への粒状物の供給についての作業者の操作や監視の負担をなくすよう構成された粒状物供給システムを提供する。
【課題を解決するための手段】
【0010】
本発明に係る粒状物供給システムは、粒状物を圃場に散布する作業機が備える粒状物貯留用の容器に供給される粒状物を運搬する運搬車と、前記運搬車に搭載され、排出口を有し、前記排出口より粒状物を前記作業機の前記容器に排出する粒状物供給装置と、前記粒状物供給装置を制御する粒状物供給制御部と、を備えている。前記粒状物供給制御部は、前記排出口を、前記容器へ向けて粒状物を排出するための目標排出口位置に配置し、その後に前記排出口より粒状物を前記容器へと排出するよう、前記粒状物供給装置を制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
桝蓋
29日前
株式会社クボタ
収穫機
29日前
株式会社クボタ
作業車
15日前
株式会社クボタ
収穫機
29日前
株式会社クボタ
収穫機
29日前
株式会社クボタ
収穫機
29日前
株式会社クボタケミックス
多層管
15日前
株式会社クボタケミックス
取付部材
23日前
株式会社クボタ
水田作業車
22日前
株式会社クボタ
水処理装置
3日前
株式会社クボタ
圃場作業機
29日前
株式会社クボタ
水田作業車
22日前
株式会社クボタ
膜分離装置
16日前
株式会社クボタ
水処理装置
3日前
株式会社クボタ
水分量測定装置
1か月前
株式会社クボタ
水分量測定装置
1か月前
株式会社クボタ
弁箱用の消失模型
24日前
株式会社クボタ
粒状物供給システム
3日前
株式会社クボタ
塗装方法及び塗装系
2日前
株式会社クボタ
独立型水利用システム
29日前
株式会社クボタ
列検出システムおよび農業機械
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
排気ガス再循環装置およびエンジン
24日前
株式会社クボタ
排気ガス再循環装置およびエンジン
24日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタ
作業車両、および作業車両の制御方法
1か月前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタケミックス
排水集合管および排水集合管の製造方法
17日前
株式会社クボタ
水処理施設の更新方法および膜分離装置
1日前
株式会社クボタケミックス
排水集合管および排水集合管の製造方法
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ