TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002839
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103206
出願日
2023-06-23
発明の名称
列検出システムおよび農業機械
出願人
株式会社クボタ
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20241226BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】関心領域の適切な選択により列検出処理を効率的に実行する。
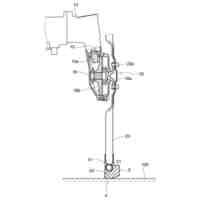
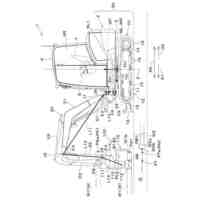
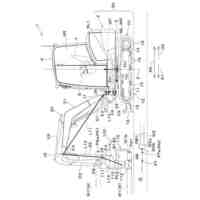
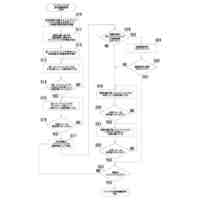
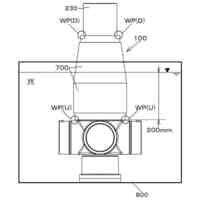
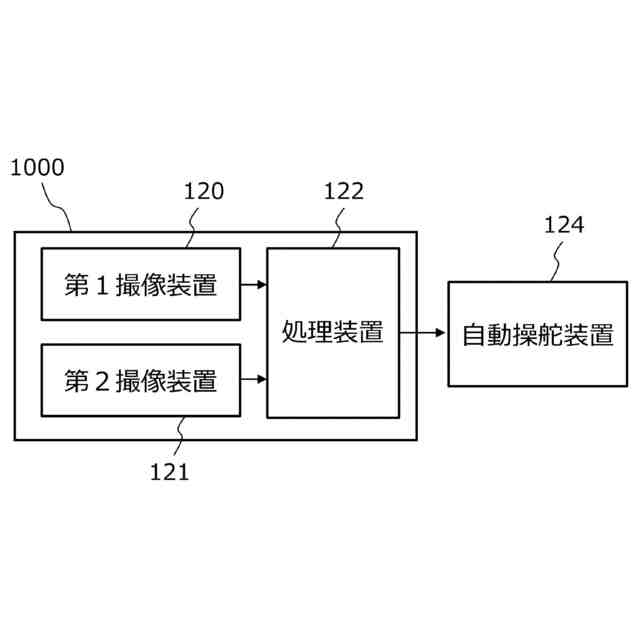
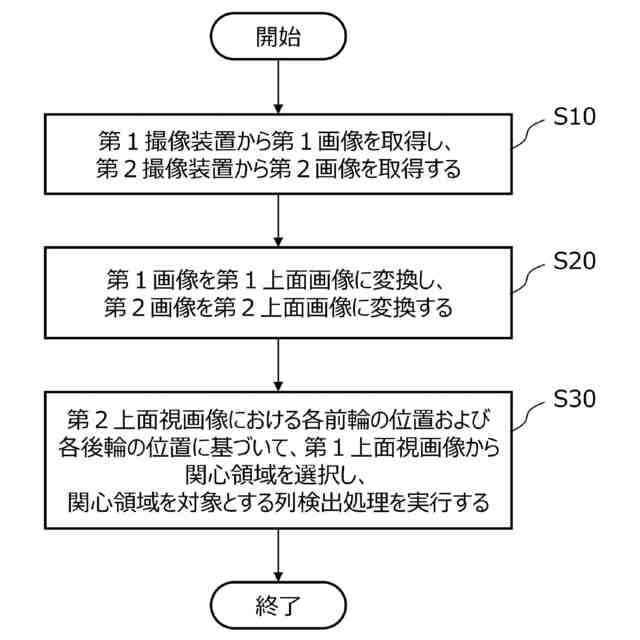
【解決手段】本開示の列検出システムは、農業機械に取り付けられ、地面を撮影して地面における第1領域についての第1画像を生成する第1撮像装置と、農業機械に取り付けられ、地面を撮影して前記地面において前記第1領域よりも後方にシフトした第2領域についての第2画像を生成する第2撮像装置と、第1画像および第2画像の画像処理を行う処理装置とを備える。第2撮像装置は各前輪の少なくとも一部および各後輪の少なくとも一部を第2画像内に含むように設けられる。処理装置は第1画像を第1上面視画像に変換し、第2画像を第2上面視画像に変換し、第2上面視画像における各前輪の位置および各後輪の位置に基づいて第1上面視画像から関心領域を選択し、関心領域を対象とする列検出処理を実行する。
【選択図】図1
特許請求の範囲
【請求項1】
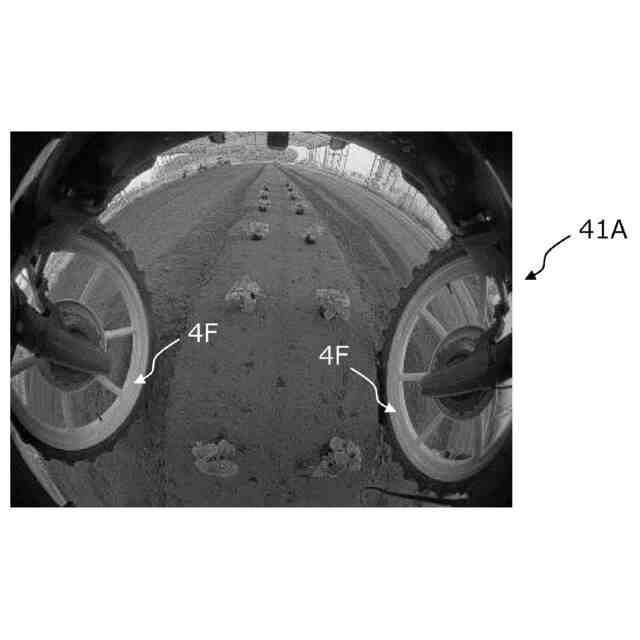
一対の前輪および一対の後輪を含む複数の車輪を備える農業機械に取り付けられ、地面を撮影して前記地面における第1領域についての第1画像を生成する第1撮像装置と、
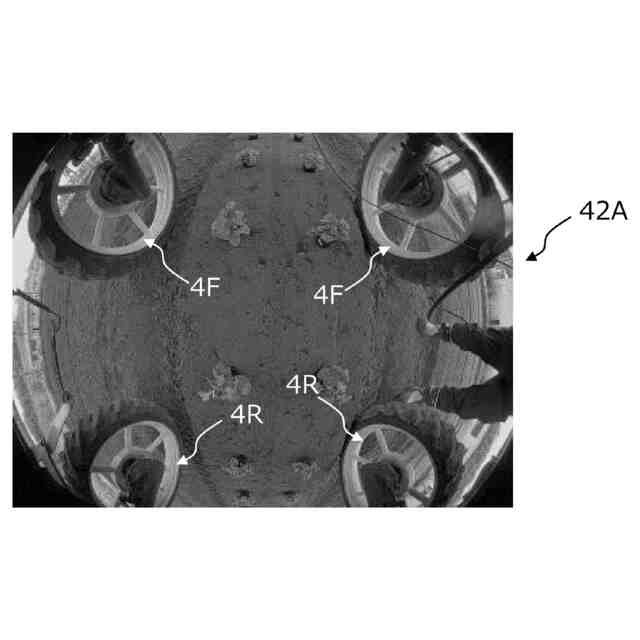
前記農業機械に取り付けられ、前記地面を撮影して前記地面において前記第1領域よりも後方にシフトした第2領域についての第2画像を生成する第2撮像装置と、
前記第1画像および前記第2画像の画像処理を行う処理装置と、
を備え、
前記第2撮像装置は、各前輪の少なくとも一部および各後輪の少なくとも一部を前記第2画像内に含むように設けられ、
前記処理装置は、
前記第1画像を、前記地面の上方から見た第1上面視画像に変換し、
前記第2画像を、前記地面の上方から見た第2上面視画像に変換し、
前記第2上面視画像における各前輪の位置および各後輪の位置に基づいて前記第1上面視画像から関心領域を選択し、前記関心領域を対象とする列検出処理を実行する、
列検出システム。
続きを表示(約 1,600 文字)
【請求項2】
前記処理装置は、
前記第2上面視画像における前記一対の前輪の領域および前記一対の後輪の領域を検出し、
前記一対の前輪の前記領域および前記一対の後輪の前記領域に基づいて、前記関心領域の幅を決定する、
請求項1に記載の列検出システム。
【請求項3】
前記関心領域は、前記第1上面視画像の中央を縦方向に延びる、前記幅を有する長方形の領域である、請求項2に記載の列検出システム。
【請求項4】
前記第1画像および前記第2画像は、カラー画像であり、
前記処理装置は、
前記一対の前輪および前記一対の後輪の色情報に基づいて、前記第2上面視画像における前記一対の前輪の前記領域および前記一対の後輪の前記領域を決定する、
請求項2に記載の列検出システム。
【請求項5】
前記処理装置は、
前記一対の前輪の前記領域から一対の前輪基準点を抽出し、
前記一対の後輪の前記領域から一対の後輪基準点を抽出し、
前記一対の前輪基準点および前記一対の後輪基準点の一方または両方に基づいて前記関心領域の前記幅を決定する、
請求項4に記載の列検出システム。
【請求項6】
前記処理装置は、
前記第2上面視画像を左部分と右部分とに分割する縦基準線を決定し、
前記一対の前輪の前記領域から、前記縦基準線に最も近い一対の画素を前記一対の前輪基準点として選択し、
前記一対の後輪の前記領域から、前記縦基準線に最も近い一対の画素を前記一対の後輪基準点として選択し、
前記一対の前輪基準点の距離によって規定される前輪間隔、および前記一対の後輪基準点の距離によって規定される後輪間隔の一方に基づいて、前記関心領域の前記幅を決定する、
請求項5に記載の列検出システム。
【請求項7】
前記処理装置は、
前記前輪間隔および前記後輪間隔のうちの相対的に小さくない方の間隔に基づいて前記関心領域の幅を決定する、
請求項6に記載の列検出システム。
【請求項8】
前記処理装置は、
前記前輪間隔および前記後輪間隔の一方に0.9以上2.0以下の数値を乗算した値を前記関心領域の幅として用いる、
請求項6に記載の列検出システム。
【請求項9】
前記処理装置は、
前記縦基準線に直交する横基準線であって、前記第2上面視画像の前記左部分および前記右部分のそれぞれを上部分と下部分とに分割し、前記一対の前輪の前記領域を前記上部分に含み、前記一対の後輪の前記領域を前記下部分に含む、横基準線を決定し、
エッジ検出技術によって前記第2上面視画像におけるエッジを検出し、
前記第2上面視画像における前記一対の前輪の前記領域および前記一対の後輪の前記領域と、前記エッジと、の重複部分を決定し、
前記縦基準線および前記横基準線によって分割された4つの部分のそれぞれにおいて、前記重複部分の前記縦基準線に最も近い位置にある画素を前記前輪基準点および前記後輪基準点として選択する、
請求項6に記載の列検出システム。
【請求項10】
前記第1画像および前記第2画像は、カラー画像であり、
前記処理装置は、
前記第1上面視画像の前記関心領域から、作物列の色を強調した第1上面視強調画像を生成し、
前記第1上面視強調画像から、前記作物列の色の指標値が閾値以上の画素と、前記指標値が前記閾値未満の画素とに分類された、第1上面視二値化画像を生成し、
前記第1上面視二値化画像に基づいて、前記地面上の作物列を検出する、
請求項1に記載の列検出システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、列検出システム、および列検出システムを備える農業機械に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
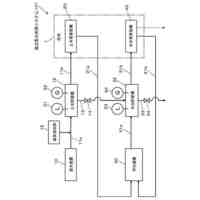
圃場で使用されるトラクタなどの作業車両の自動化に向けた研究開発が進められている。例えば、精密な測位が可能なGNSS(Global Navigation Satellite System)などの測位システムを利用して自動操舵で走行する作業車両が実用化されている。自動操舵に加えて速度制御を自動で行う作業車両も実用化されている。
【0003】
また、圃場における作物の列(作物列)または畝をカメラなどの撮像装置を用いて検出し、検出した作物列または畝に沿って作業車両の走行を制御するビジョン・ガイダンスシステムが開発されつつある。
【0004】
特許文献1は、列状に形成された畝に作物が植えられた耕作地を畝に沿って走行する作業機を開示している。特許文献1は、車載カメラで耕作地を斜め上方から撮影して取得した原画像を二値化処理した後、平面射影変換画像を生成することを記載している。特許文献1が開示する技術では、平面射影変換画像を回転させることにより、向きが異なる多数の回転画像を生成し、畝と畝との間の作業通路を検出する。
【先行技術文献】
【特許文献】
【0005】
特開2016-208871号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
画像認識技術を利用して農業機械が作物列または畝などの列領域に沿って自動操舵で移動するとき、列領域を高い位置精度で検出することが求められる。
【0007】
本開示は、列領域の検出精度を向上させることが可能な列検出システム、および列検出システムを備える農業機械を提供する。
【課題を解決するための手段】
【0008】
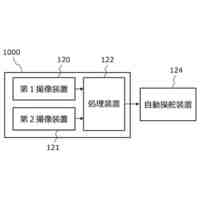
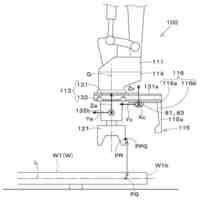
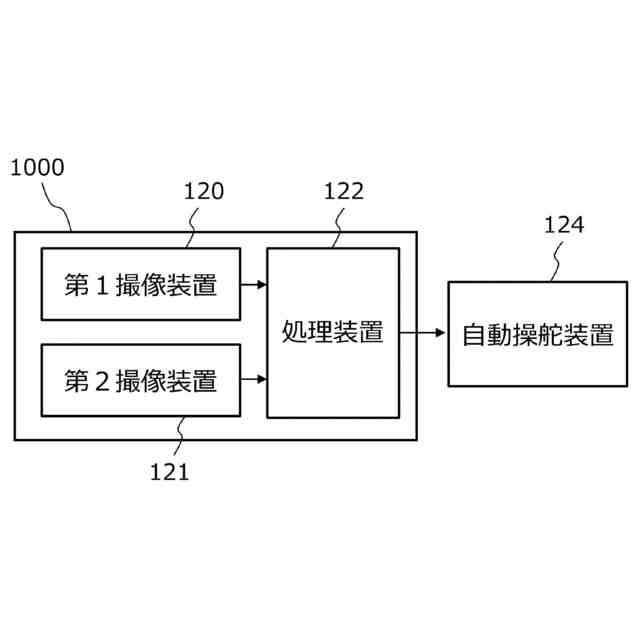
本開示の一態様による列検出システムは、一対の前輪および一対の後輪を含む複数の車輪を備える農業機械に取り付けられ、地面を撮影して前記地面における第1領域についての第1画像を生成する第1撮像装置と、前記農業機械に取り付けられ、前記地面を撮影して前記地面において前記第1領域よりも後方にシフトした第2領域についての第2画像を生成する第2撮像装置と、前記第1画像および前記第2画像の画像処理を行う処理装置と、
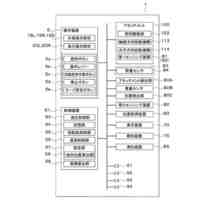
を備える。前記第2撮像装置は、各前輪の少なくとも一部および各後輪の少なくとも一部を前記第2画像内に含むように設けられる。前記処理装置は、前記第1画像を、前記地面の上方から見た第1上面視画像に変換し、前記第2画像を、前記地面の上方から見た第2上面視画像に変換し、前記第2上面視画像における各前輪の位置および各後輪の位置に基づいて前記第1上面視画像から関心領域を選択し、前記関心領域を対象とする列検出処理を実行する。
【0009】
本開示の他の態様による農業機械は、上記の列検出システムと、前記列検出システムが検出した作物列または畝の位置に基づいて前記農業機械の進行方向を制御する自動操舵装置と、を備える農業機械。
【0010】
本開示の包括的または具体的な態様は、装置、システム、方法、集積回路、コンピュータプログラム、もしくはコンピュータが読み取り可能な非一時的記憶媒体、またはこれらの任意の組み合わせによって実現され得る。コンピュータが読み取り可能な記憶媒体は、揮発性の記憶媒体を含んでいてもよいし、不揮発性の記憶媒体を含んでいてもよい。装置は、複数の装置で構成されていてもよい。装置が2つ以上の装置で構成される場合、当該2つ以上の装置は、1つの機器内に配置されてもよいし、分離した2つ以上の機器内に分かれて配置されていてもよい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
桝蓋
29日前
株式会社クボタ
収穫機
29日前
株式会社クボタ
作業車
15日前
株式会社クボタ
収穫機
29日前
株式会社クボタ
収穫機
29日前
株式会社クボタ
収穫機
29日前
株式会社クボタケミックス
多層管
15日前
株式会社クボタケミックス
取付部材
23日前
株式会社クボタ
水田作業車
22日前
株式会社クボタ
水処理装置
3日前
株式会社クボタ
圃場作業機
29日前
株式会社クボタ
水田作業車
22日前
株式会社クボタ
膜分離装置
16日前
株式会社クボタ
水処理装置
3日前
株式会社クボタ
水分量測定装置
1か月前
株式会社クボタ
水分量測定装置
1か月前
株式会社クボタ
弁箱用の消失模型
24日前
株式会社クボタ
粒状物供給システム
3日前
株式会社クボタ
塗装方法及び塗装系
2日前
株式会社クボタ
独立型水利用システム
29日前
株式会社クボタ
列検出システムおよび農業機械
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
作業機および作業機の制御方法
1日前
株式会社クボタ
排気ガス再循環装置およびエンジン
24日前
株式会社クボタ
排気ガス再循環装置およびエンジン
24日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタ
作業車両、および作業車両の制御方法
1か月前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
1日前
株式会社クボタケミックス
排水集合管および排水集合管の製造方法
17日前
株式会社クボタ
水処理施設の更新方法および膜分離装置
1日前
株式会社クボタケミックス
排水集合管および排水集合管の製造方法
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ