TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024103184
公報種別
公開特許公報(A)
公開日
2024-08-01
出願番号
2023007379
出願日
2023-01-20
発明の名称
作業支援システム、作業機械、および作業支援プログラム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/20 20060101AFI20240725BHJP(水工;基礎;土砂の移送)
要約
【課題】設置地点に作業対象物を安定して設置できるか否かを予め判定する。
【解決手段】転がり方向を有した作業対象物Sを捕捉した状態で運搬可能なアタッチメント15を備える作業機械10に用いられる作業支援システム1は、作業対象物Sの目標設置位置における傾斜角度と傾斜方向とを計測し、上から見たときに傾斜方向に対して作業対象物Sの設置方向が成す水平方向角度を取得し、傾斜角度ごとに予め設定された許容範囲を判断基準に、取得した水平方向角度で目標設置位置に作業対象物Sを設置した場合の安定度を決定する。
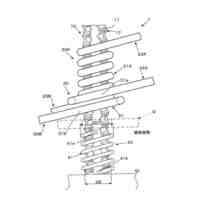
【選択図】図2
特許請求の範囲
【請求項1】
転がり方向を有した作業対象物を捕捉した状態で運搬可能なアタッチメントを備える作業機械に用いられる作業支援システムであって、
前記作業対象物の目標設置位置における傾斜角度と傾斜方向とを計測する傾斜計測部と、
上から見たときに前記傾斜方向に対して前記転がり方向に関連する前記作業対象物の設置方向が成す水平方向角度を取得する水平方向角度取得部と、
安定的に前記作業対象物を配置するための前記水平方向角度の許容範囲であって前記傾斜角度ごとに予め設定された前記許容範囲を判断基準に、前記水平方向角度取得部が取得した前記水平方向角度で前記目標設置位置に前記作業対象物を設置した場合の安定度を決定する安定度決定部と、
を備える、
作業支援システム。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の作業支援システムであって、
前記安定度を前記作業機械の操作者に教示する安定度教示部をさらに有する、
作業支援システム。
【請求項3】
請求項1に記載の作業支援システムであって、
前記傾斜計測部は、前記作業対象物の設置対象となる前記作業機械の周囲領域における前記傾斜角度を計測可能であり、
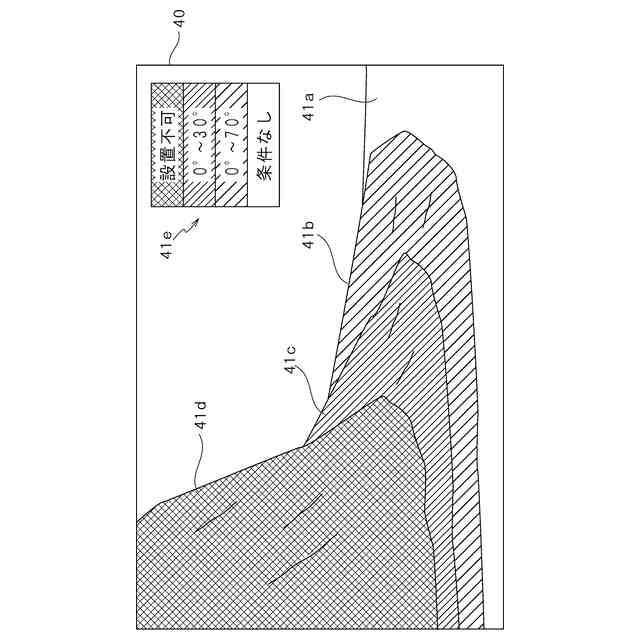
前記安定度決定部は、前記傾斜角度に対応する前記許容範囲に応じて前記周囲領域を段階的に区分けする、
作業支援システム。
【請求項4】
請求項3に記載の作業支援システムであって、
段階的に区分けした前記周囲領域を表示する周囲領域表示部をさらに有する、
作業支援システム。
【請求項5】
請求項2に記載の作業支援システムであって、
前記安定度教示部は、前記作業対象物が前記目標設置位置に設置される際、前記目標設置位置における前記作業対象物の前記許容範囲を示す、
作業支援システム。
【請求項6】
請求項1に記載の作業支援システムであって、
前記作業機械は、
前記アタッチメントの操作を受け付ける操作部と、
前記操作部が受け付けた操作に応じて、前記アタッチメントを制御するアタッチメント制御部と、
を備え、
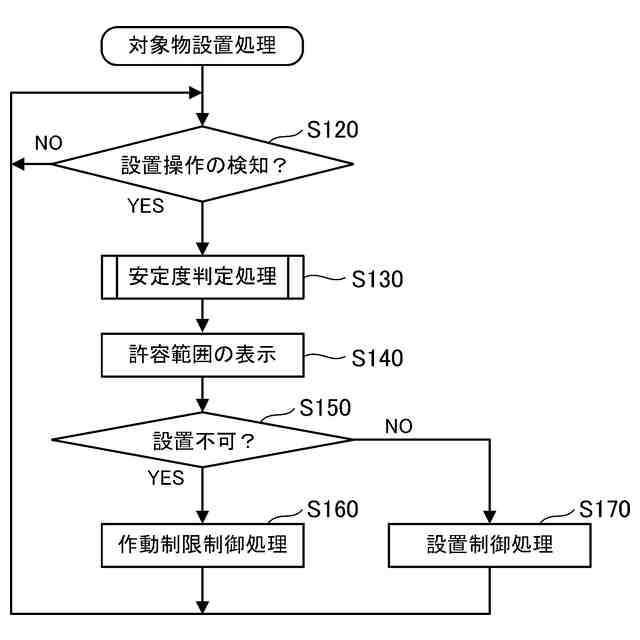
前記アタッチメント制御部は、前記作業対象物を設置させる作動の操作を受け付けた際、前記作業対象物が前記許容範囲内にない場合、前記アタッチメントによる前記作業対象物を設置させる作動を制限する、
作業支援システム。
【請求項7】
請求項6に記載の作業支援システムであって、
前記アタッチメント制御部は、前記作業対象物を設置させる作動の操作を受け付けた際、前記作業対象物が前記許容範囲内にない場合、前記アタッチメントによる前記作業対象物を設置させる作動を禁止する、
作業支援システム。
【請求項8】
請求項6に記載の作業支援システムであって、
前記アタッチメント制御部は、前記作業対象物を設置させる作動の操作を受け付けた際、前記作業対象物が前記許容範囲内にない場合、前記水平方向角度が前記許容範囲内となるように前記作業対象物を回動させてから前記作業対象物を設置させるように前記アタッチメントを制御する、
作業支援システム。
【請求項9】
請求項1に記載の作業支援システムであって、
環境条件を入力する入力部をさらに備え、
前記安定度決定部は、
前記判断基準を予め環境条件毎に取得し、
入力された前記環境条件に応じて前記判断基準を切り替える、
作業支援システム。
【請求項10】
転がり方向を有した作業対象物を捕捉した状態で運搬可能なアタッチメントと、
前記作業対象物の目標設置位置における傾斜角度と傾斜方向とを計測する傾斜計測部と、
上から見たときに前記傾斜方向に対して前記転がり方向に関連する前記作業対象物の設置方向が成す水平方向角度を取得する水平方向角度取得部と、
安定的に前記作業対象物を配置するための前記水平方向角度の許容範囲であって前記傾斜角度ごとに予め設定された前記許容範囲を判断基準に、前記水平方向角度取得部が取得した前記水平方向角度で前記目標設置位置に前記作業対象物を設置した場合の安定度を決定する安定度決定部と、
を備える、
作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械での先端アタッチメントによる作業対象物への作業を支援する作業支援システム、作業機械、および作業支援プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
例えば、特許文献1には、建設機械の周囲の地形の形状と、建設機械の接地面の角度から、建設機械の走行する方向の傾斜角度を算出し、当該方向が建設機械にとって不安定状態であるか否かを予め判定する監視装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-133143号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
同文献には、建設機械の安定性を判定することが記載されているが、このような作業機械が作業する対象である作業対象物を安定的に配置することについては記載されていない。
【0005】
そこで、本発明は、目標設置位置に作業対象物を安定して設置できるか否かを予め判定することができる、作業支援システム、作業機械、および作業支援プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
作業支援システムは、転がり方向を有した作業対象物を捕捉した状態で運搬可能なアタッチメントを備える作業機械に用いられる作業支援システムであって、傾斜計測部と、水平方向角度取得部と、安定度決定部と、を備える。傾斜計測部は、前記作業対象物の目標設置位置における傾斜角度と傾斜方向とを計測する。水平方向角度取得部は、上から見たときに前記傾斜方向に対して前記転がり方向に関連する前記作業対象物の設置方向が成す水平方向角度を取得する。安定度決定部は、安定的に前記作業対象物を配置するための前記水平方向角度の許容範囲であって前記傾斜角度ごとに予め設定された前記許容範囲を判断基準に、前記水平方向角度取得部が取得した前記水平方向角度で前記目標設置位置に前記作業対象物を設置した場合の安定度を決定する。
【0007】
作業機械は、アタッチメントと、傾斜計測部と、水平方向角度取得部と、安定度決定部と、を備える。アタッチメントは、転がり方向を有した作業対象物を捕捉した状態で運搬可能である。傾斜計測部は、前記作業対象物の目標設置位置における傾斜角度と傾斜方向とを計測する。水平方向角度取得部は、上から見たときに前記傾斜方向に対して前記転がり方向に関連する前記作業対象物の設置方向が成す水平方向角度を取得する。安定度決定部は、安定的に前記作業対象物を配置するための前記水平方向角度の許容範囲であって前記傾斜角度ごとに予め設定された前記許容範囲を判断基準に、前記水平方向角度取得部が取得した前記水平方向角度で前記目標設置位置に前記作業対象物を設置した場合の安定度を決定する。
【0008】
作業支援プログラムは、転がり方向を有した作業対象物を捕捉した状態で運搬可能なアタッチメントを備える作業機械に用いられる作業支援プログラムであって、傾斜計測ステップと、水平方向角度取得ステップと、安定度決定ステップと、をコンピュータに実行させる。傾斜計測ステップでは、前記作業対象物の目標設置位置における傾斜角度と傾斜方向とを計測する。水平方向角度取得ステップでは、上から見たときに前記傾斜方向に対して前記転がり方向に関連する前記作業対象物の設置方向が成す水平方向角度を取得する。安定度決定ステップでは、安定的に前記作業対象物を配置するための前記水平方向角度の許容範囲であって前記傾斜角度ごとに予め設定された前記許容範囲を判断基準に、前記水平方向角度取得ステップで取得した前記水平方向角度で前記目標設置位置に前記作業対象物を設置した場合の安定度を決定する。
【発明の効果】
【0009】
上記の作業支援システム、作業機械、および、作業支援プログラムのそれぞれにより、設置地点に作業対象物を安定して設置できるか否かを予め判定することができる。
【図面の簡単な説明】
【0010】
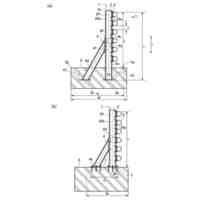
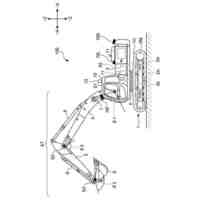
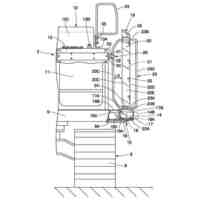
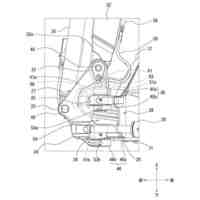
作業支援システム1を適用する作業機械を横から見た図である。
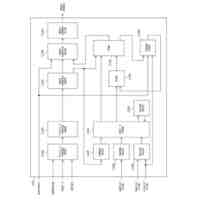
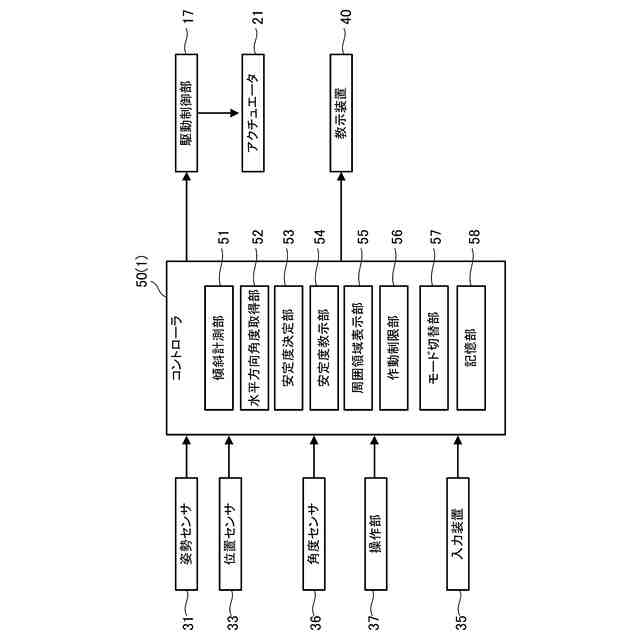
作業支援システムのブロック図である。
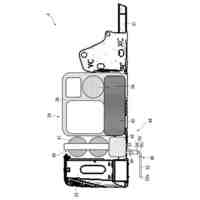
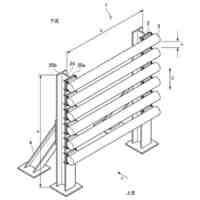
図1に示す作業機械などを上から見た図であり、斜面の傾斜方向と作業対象物の設置方向とが成す水平方向角度についての説明図である。
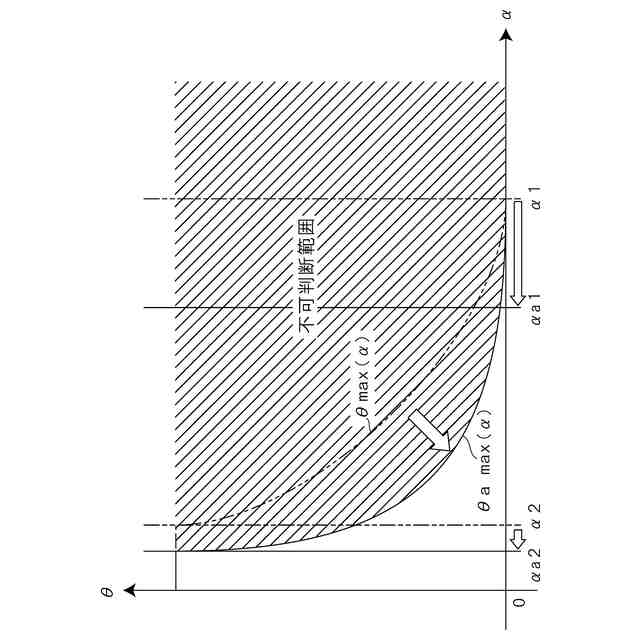
図3に示す作業対象物を設置した場合の安定度の判断基準の一例を示す説明図である。
図4に示す判断基準を変更する場合の一例を示す説明図である。
図3に示す作業対象物の水平方向角度の許容範囲を示す画像の表示態様の一例を示す図である。
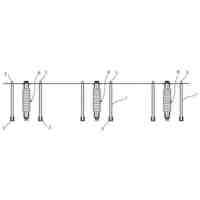
図3に示す作業対象物の水平方向角度の許容範囲を段階的に区分けした周囲領域を示す画像の表示態様の一例を示す図である。
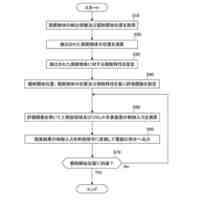
図2に示すコントローラによる安定度判定処理のフローチャートである。
図2に示すコントローラによる対象物設置処理のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日鉄建材株式会社
土砂捕捉柵
13日前
日鉄建材株式会社
土砂捕捉柵
13日前
株式会社高知丸高
仮締切構造体
1日前
大和ハウス工業株式会社
バケット
13日前
株式会社パルパルス
抜け止め装置
15日前
日本ソリッド株式会社
防舷材の保護方法
7日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
6日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
作業機械
15日前
住友重機械工業株式会社
ショベル
20日前
株式会社サンライズ
擁壁排水管用カバー
21日前
住友重機械工業株式会社
ショベル
21日前
株式会社西原鉄工所
コンクリートブロック
9日前
株式会社テノックス
共回り監視装置
9日前
西部電機株式会社
水門開閉装置
6日前
株式会社テノックス
深層混合処理工法
9日前
炎重工株式会社
桟橋及び移動体システム
13日前
株式会社日立建機ティエラ
建設機械
13日前
株式会社日立建機ティエラ
作業機械
13日前
コベルコ建機株式会社
作業機械の制御装置
14日前
日立建機株式会社
建設機械
20日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
建設機械
14日前
鹿島建設株式会社
運搬機構および管体の搬送方法
7日前
C技研株式会社
切削装置
9日前
ヤンマーホールディングス株式会社
建設機械
20日前
ヤンマーホールディングス株式会社
作業機械
14日前
ヤンマーホールディングス株式会社
作業機械
20日前
ヤンマーホールディングス株式会社
建設機械
14日前
日鉄建材株式会社
梁部材の取付構造及び土砂捕捉柵
13日前
日立建機株式会社
プラグ
20日前
日立建機株式会社
作業車両
17日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ