TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024132386
公報種別
公開特許公報(A)
公開日
2024-10-01
出願番号
2023043125
出願日
2023-03-17
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/24 20060101AFI20240920BHJP(水工;基礎;土砂の移送)
要約
【課題】掘削位置への到達時間の短縮と作業具の周囲物体との接触による損傷可能性の低減とを両立させた戻り動作を行うことができる作業機械を提供する。
【解決手段】作業機械1は、フロント作業装置2のバケット10を掘削開始位置に向かって移動させる戻り動作の制御を行う制御装置60を備える。制御装置60は、周囲物体検出装置26により検出された周囲物体に対してバケット10との接触の可否を設定し、周囲物体のうち接触可に設定された周囲物体については、バケット10の接触を許容しつつ戻り動作を行うように、上部旋回体5及びフロント作業装置2を動作させる。
【選択図】 図11
特許請求の範囲
【請求項1】
旋回可能な旋回体と、
前記旋回体に対して上下方向に回動可能に取り付けられ、作業具を有する多関節型の作業装置と、
前記旋回体の周囲に存在する地形を含む物体を検出する周囲物体検出装置と、
前記旋回体及び前記作業装置を制御する制御装置とを備え、
前記制御装置は、前記作業装置が掘削対象の掘削を開始する位置である掘削開始位置に向かって前記作業具を移動させる戻り動作の制御を行うように構成された作業機械において、
前記制御装置は、
前記周囲物体検出装置により検出された物体である周囲物体に対して、前記作業具との接触の可否を設定し、
前記周囲物体のうち接触可に設定された周囲物体については、前記作業具の接触を許容しつつ前記戻り動作を行うように、前記旋回体及び前記作業装置を動作させる
ことを特徴とする作業機械。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の作業機械において、
前記制御装置は、
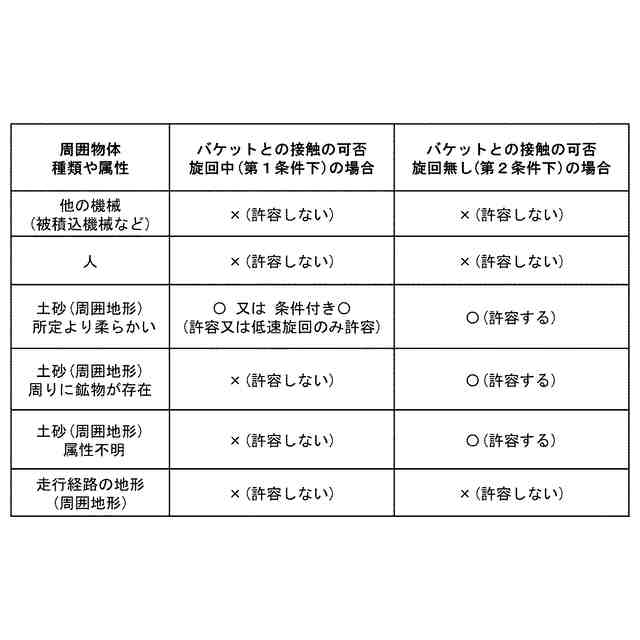
前記周囲物体に対して前記作業具との接触の可否の条件を示す接触特性を設定し、
前記作業具の前記周囲物体に対する接触の有無が前記接触特性を満たしつつ前記作業具が前記掘削開始位置に近づくような前記旋回体及び前記作業装置の制御入力を演算し、
当該演算された制御入力に基づき前記旋回体及び前記作業装置を動作させる
ことを特徴とする作業機械。
【請求項3】
請求項2に記載の作業機械において、
前記制御装置は、
前記周囲物体の種類又は属性を判別し、
判別結果の前記周囲物体の種類又は属性に応じて前記接触特性を設定する
ことを特徴とする作業機械。
【請求項4】
請求項2に記載の作業機械において、
前記制御装置は、オペレータにより操作される入力装置からの指示に応じて前記接触特性を設定する
ことを特徴とする作業機械。
【請求項5】
請求項2に記載の作業機械において、
前記接触特性は、前記旋回体の旋回動作に伴い前記作業具が移動する場合と前記旋回体の旋回動作が無く前記作業装置の動作に伴い前記作業具が移動する場合とで前記周囲物体に対する前記作業具との接触の可否の条件が異なるように設定されている
ことを特徴とする作業機械。
【請求項6】
請求項2に記載の作業機械において、
前記接触特性は、前記周囲物体に対する前記作業具の全体との接触の可否の条件を示すものである
ことを特徴とする作業機械。
【請求項7】
請求項2に記載の作業機械において、
前記接触特性は、前記周囲物体に対する前記作業具の第1部分との接触の可否の条件と、前記周囲物体に対する前記作業具の前記第1部分とは異なる第2部分との接触の可否の条件とが異なるように設定されている
ことを特徴とする作業機械。
【請求項8】
請求項2に記載の作業機械において、
前記制御装置は、前記周囲物体が前記旋回体の周囲に存在する地形である周囲地形の場合、
前記周囲物体検出装置の検出情報を基に得られる前記周囲地形の作業開始前の形状と掘削作業中の形状とを比較し、
前記周囲地形の作業開始前の形状に対する掘削作業中の形状の変化分の領域に対して、前記作業具との接触を許容する接触特性を設定する
ことを特徴とする作業機械。
【請求項9】
請求項2に記載の作業機械において、
前記制御装置は、
作業現場の地質情報を取得し又は予め記憶し、
前記周囲物体が前記旋回体の周囲に存在する地形である周囲地形の場合には、前記周囲地形に対して前記地質情報に応じて前記接触特性を設定する
ことを特徴とする作業機械。
【請求項10】
請求項2に記載の作業機械において、
前記制御装置は、
被積込機械の走行経路の情報を含む作業現場の設計情報を取得し又は予め記憶し、
前記周囲物体が前記設計情報に含まれる前記走行経路に対応する地形である場合には、前記周囲物体に対して前記作業具との接触を許容しない接触特性を設定する
ことを特徴とする作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業を行う多関節型の作業装置と当該作業装置が取り付けられた旋回可能な旋回体とを備えた作業機械に関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
油圧ショベルなどの作業機械には、旋回可能な旋回体に多関節型の作業装置が取り付けられているものがある。作業装置は、例えば、旋回体に対して上下方向に回動可能に取り付けられたブームと、ブームに回動可能に取り付けられたアームと、アームに回動可能に取り付けられた作業具としてのバケットとで構成されている。
【0003】
このような構成の作業機械は、例えば、作業装置により土砂を掘削する掘削動作、掘削した土砂等の掘削物をダンプトラック等の被積込機械の荷台の上方まで運搬する運搬動作、掘削物を被積込機械の荷台に放出する放土動作、放土後のバケットを掘削開始位置まで移動させる戻り動作を順に繰り返すことによって土砂の掘削積込作業を行う。このような掘削積込作業を行うとき、作業機械の周囲には、掘削対象近傍の土地や被積込機械などの物体が存在する。そのため、掘削積込作業では、バケットを掘削開始位置まで移動させる戻り動作のとき、周囲の物体に対するバケットの接触を考慮する必要がある。
【0004】
作業機械の周囲に存在する物体に対する作業具の接触を考慮した作業具の移動方法として、特許文献1に記載の技術が知られている。特許文献1に記載の経路設定システムは、作業機械のアタッチメント(バケット)の目標経路を設定するものである。当該経路設定システムは、目標経路の開始点と終了点の間に障害物の特定部位があると判定した場合には、アタッチメントが障害物を回避する回避動作を行う回避経路を設定する一方、障害物の特定部位がないと判定した場合には、アタッチメントが回避動作を行わない非回避経路を設定するように構成されている。
【先行技術文献】
【特許文献】
【0005】
特開2022-71693号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の技術を上述の作業機械の戻り動作に対して適用する場合を考える。特許文献1に記載の技術においては、バケット(アタッチメント)の移動の際にバケットに接触する可能性のあるものを障害物とみなしている。したがって、バケットの戻り動作の際にバケットの物体との接触による損傷を防止することはできる。しかし、山形状の土砂山の頂上なども障害物として見なしている。このため、戻り動作における目標経路の終了点となる掘削開始位置の近傍(例えば直上)に土砂山の頂上(障害物の特定部位)があると、土砂山の頂上を回避する回避経路が設定されるので、当該回避経路上をバケットが移動することになる。その結果、作業具であるバケットが掘削開始位置に到達するまでに時間を要し、作業効率が低下することが考えられる。戻り動作における作業効率の観点からは、バケットに接触する可能性のあるものを全て障害物とみなすことを見直す必要がある。例えば、バケットが土砂山に接触しても、当該接触によるバケットの損傷が発生する可能性が極めて低いからである。
【0007】
本発明は、上記の事柄に基づいてなされたもので、その目的は、掘削位置までの到達時間の短縮と作業具の周囲物体との接触による損傷の可能性の低減とを両立させた戻り動作を行うことができる作業機械を提供することである。
【課題を解決するための手段】
【0008】
本願は上記課題を解決する手段を複数含んでいる。その一例を挙げるならば、旋回可能な旋回体と、前記旋回体に対して上下方向に回動可能に取り付けられ、作業具を有する多関節型の作業装置と、前記旋回体の周囲に存在する地形を含む物体を検出する周囲物体検出装置と、前記旋回体及び前記作業装置を制御する制御装置とを備え、前記制御装置は、前記作業装置が掘削対象の掘削を開始する位置である掘削開始位置に向かって前記作業具を移動させる戻り動作の制御を行うように構成された作業機械において、前記制御装置は、前記周囲物体検出装置により検出された物体である周囲物体に対して、前記作業具との接触の可否を設定し、前記周囲物体のうち接触可に設定された周囲物体については、前記作業具の接触を許容しつつ前記戻り動作を行うように、前記旋回体及び前記作業装置を動作させることを特徴とする。
【発明の効果】
【0009】
本発明の一例によれば、接触可に設定された周囲物体と作業具との接触を許容する戻り動作は、当該周囲物体との接触を回避する戻り動作の場合よりも、掘削位置までの経路を短くすることが可能となる。この場合、周囲物体に対する作業具との接触の可否を作業具の損傷可能性に応じて設定することで、作業具の損傷可能性を低減することができる。すなわち、掘削位置までの到達時間の短縮と作業具の周囲物体との接触による損傷の可能性の低減とを両立させた戻り動作を行うことができる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
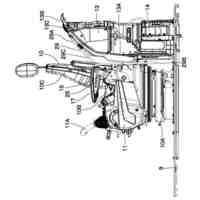
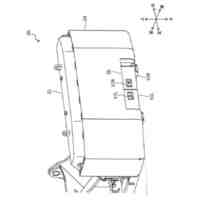
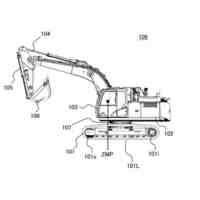
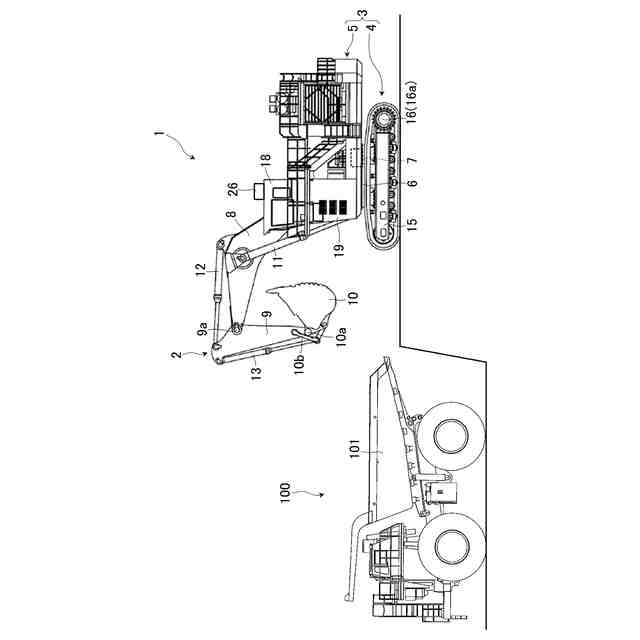
本発明の第1の実施形態に係る作業機械としての油圧ショベル及び当該油圧ショベルの積込作業の積込先である被積込機械としてのダンプトラックを示す外観図である。
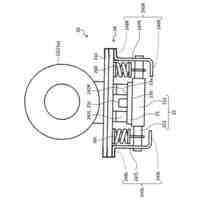
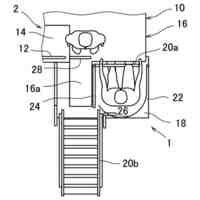
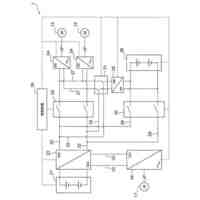
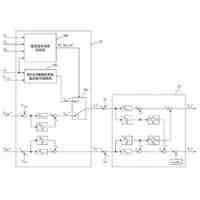
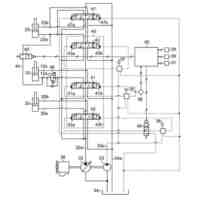
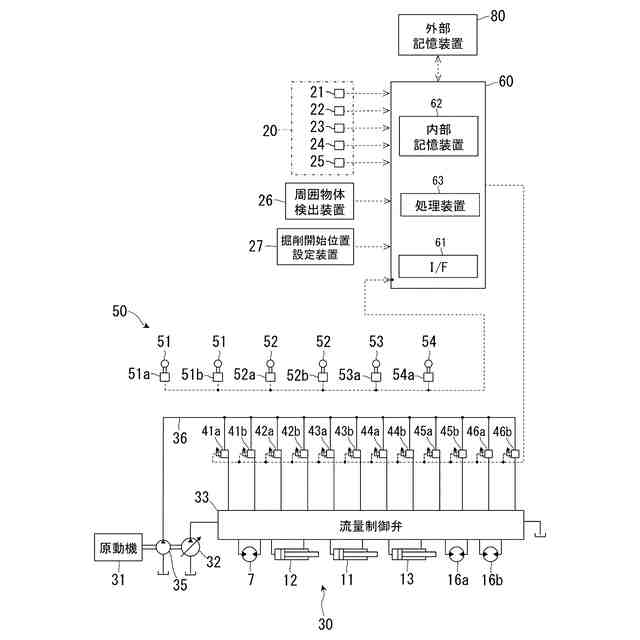
第1の実施形態に係る作業機械における油圧システム及び当該油圧システムの制御システムを示す構成図である。
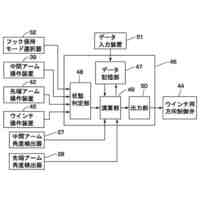
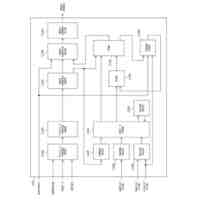
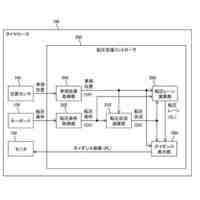
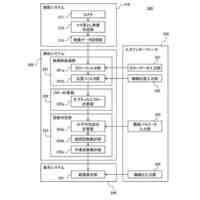
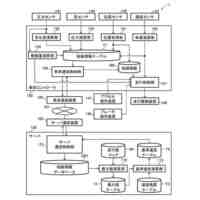
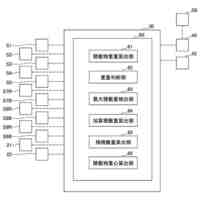
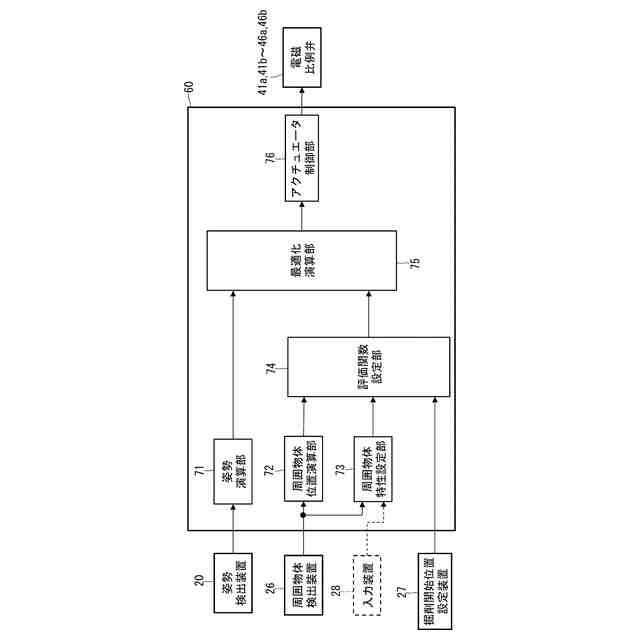
図2に示す第1の実施形態に係る作業機械の制御装置の機能を示すブロック図である。
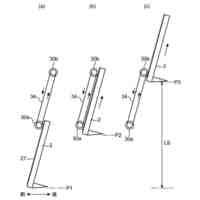
第1の実施形態に係る作業機械に設定された基準座標系のX-Z軸の平面と共に油圧ショベルの姿勢を規定する情報を示す説明図である。
第1の実施形態に係る作業機械に設定された基準座標系のX-Y軸の平面と共に油圧ショベルの姿勢を規定する情報を示す説明図である。
図3に示す第1の実施形態に係る作業機械の制御装置における周囲物体特性設定部による接触特性の設定方法の一例を示す説明図である。
図3に示す第1の実施形態に係る作業機械の制御装置における評価関数設定部による侵入禁止領域の設定方法の一例を示す説明図である。
図7に示す侵入禁止領域を基準座標系において示した図である。
図3に示す第1の実施形態に係る作業機械の制御装置における評価関数設定部により設定されるペナルティコストへの重み(ペナルティ関数の係数)の第1例を示す図である。
図3に示す第1の実施形態に係る作業機械の制御装置における評価関数設定部により設定されるペナルティコストへの重み(ペナルティ関数の係数)の第2例を示す図である。
図3に示す第1の実施形態に係る作業機械の制御装置における評価関数の最適化演算で移動対象とするバケットの部位の一例を示す説明図である。
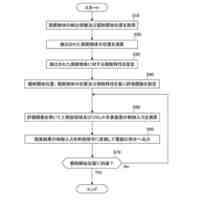
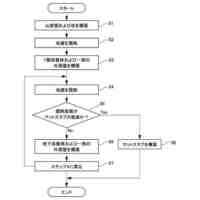
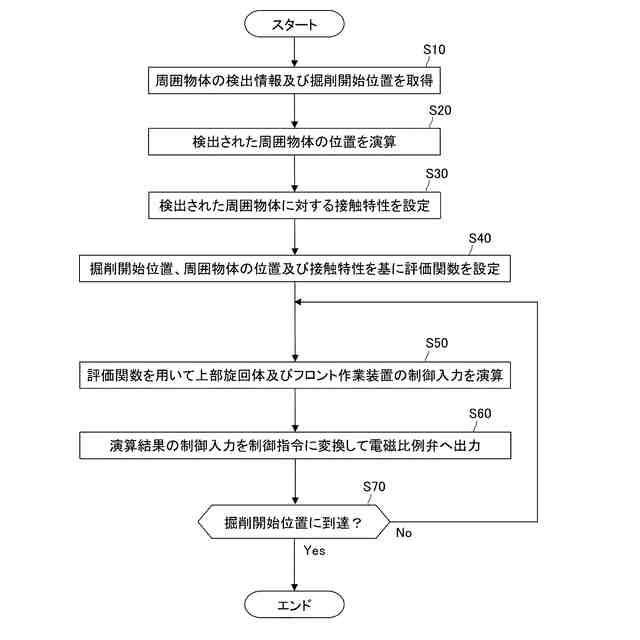
図3に示す第1の実施形態に係る作業機械の制御装置による戻り動作の制御手順の一例を示すフローチャートである。
第1の実施形態に係る作業機械の戻り動作においてバケットと接触する周囲地形(周囲物体)が存在しない場合のバケット経路を示す説明図である。
戻り動作においてバケットと接触する可能性がある周囲地形(周囲物体)が存在する場合のバケット経路の一例を示す説明図である。
第1の実施形態に係る作業機械の戻り動作において接触禁止の接触特性が設定された周囲地形(周囲物体)が存在する場合のバケット経路を示す説明図である。
第1の実施形態に係る作業機械の戻り動作において接触可能な接触特性が設定された周囲地形(周囲物体)が存在する場合のバケット経路を示す説明図である。
第1の実施形態に係る作業機械の戻り動作において被積込機械への放土動作終了時点からのバケット経路を示す説明図である。
本発明の第2の実施形態に係る作業機械における制御装置の機能を示すブロック図である。
掘削対象が鉱物を含む場合であると共に戻り動作においてバケットと接触する可能性がある周囲地形(周囲物体)が存在する場合を示す説明図である。
本発明の第3の実施形態に係る作業機械における制御装置の機能を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
建設機械
4日前
日立建機株式会社
作業機械
11日前
日立建機株式会社
作業機械
今日
日立建機株式会社
作業車両
1日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
建設機械
11日前
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
11日前
日立建機株式会社
運搬車両
11日前
日立建機株式会社
ダンプトラック
18日前
日立建機株式会社
ダンプトラック
18日前
日立建機株式会社
ダンプトラック
19日前
日立建機株式会社
転圧支援システム
11日前
日立建機株式会社
電気駆動システム
1日前
日立建機株式会社
作業機械の周囲監視装置
1日前
日立建機株式会社
建設機械のモニタリングシステム
11日前
日立建機株式会社
誘導発電機を用いた発電システム
今日
日立建機株式会社
フィルタ装置及びそれを備えた作業機械
1日前
日立建機株式会社
車両制御システム及びそれを備える運搬車両
11日前
個人
防災水嚢
7日前
株式会社大林組
接続構造
11日前
日本車輌製造株式会社
杭打機
22日前
株式会社トラバース
拡底型の鋼管杭
26日前
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
今日
日立建機株式会社
深礎掘削機
29日前
大成建設株式会社
地下構造物の構築方法
11日前
住友重機械工業株式会社
作業機械
11日前
株式会社エンバイン
螺旋状掛止め材
1日前
SUS株式会社
ユニットハウス用基礎
29日前
株式会社丸島アクアシステム
除塵装置
26日前
大和ハウス工業株式会社
スラブ構築方法
25日前
株式会社大林組
複合地盤検討方法
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ