TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024130088
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023039601
出願日
2023-03-14
発明の名称
電気駆動システム
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
H02P
9/04 20060101AFI20240920BHJP(電力の発電,変換,配電)
要約
【課題】二巻線誘導発電機の回転数及び補助巻線側の負荷の大きさに係わらず、補助巻線側に設けられた1台の電力変換器で、補助巻線側の直流電圧を維持することが可能な電気駆動システムを提供する。
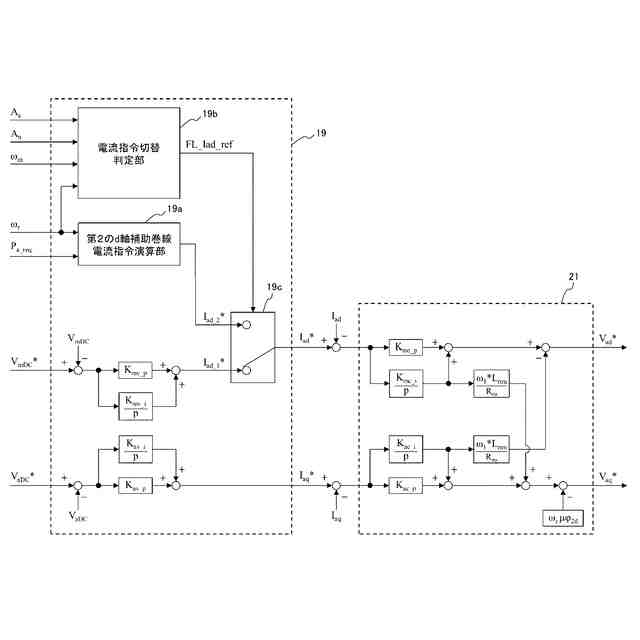
【解決手段】制御装置11は、第1直流電圧VmDCと第1直流電圧VmDCの指令値VmDC*とに基づいて補助巻線2132の第1のd軸電流指令値Iad_1*を算出し、発電機2の回転数ωrと補機41の要求電力Pa_reqとに基づいて補助巻線2132の第2のd軸電流指令値Iad_2*を算出し、トラクション状態では、補助巻線2132のd軸電流値が前記第1のd軸電流指令値Iad_1*と一致するように電力変換器7を制御し、リタード状態またはアイドリング状態では、補助巻線2132のd軸電流値が前記第2のd軸電流指令値Iad_2*と一致するように電力変換器7を制御する。
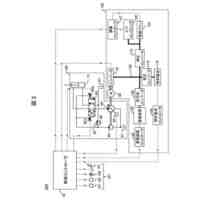
【選択図】 図5
特許請求の範囲
【請求項1】
走行モータと、
補機と、
主巻線と補助巻線とを含む固定子を有する発電機と、
前記主巻線に接続され、前記主巻線で発電した交流電圧を第1直流電圧に変換する整流器と、
前記整流器に接続され、前記第1直流電圧を交流電圧に変換して前記走行モータに供給する走行用インバータと、
前記補助巻線に接続され、前記主巻線および前記補助巻線の電圧を制御するとともに、前記補助巻線で発電した交流電圧を第2直流電圧に変換して前記補機に供給する電力変換器と、
前記電力変換器を制御する制御装置とを備えた電気駆動システムにおいて、
前記制御装置は、
前記第1直流電圧と前記第1直流電圧の指令値とに基づいて前記補助巻線の第1のd軸電流指令値を算出し、
前記発電機の回転数と前記補機の要求電力とに基づいて前記補助巻線の第2のd軸電流指令値を算出し、
前記走行用インバータから前記走行モータに電力が供給されるトラクション状態では、前記補助巻線のd軸電流値が前記第1のd軸電流指令値と一致するように前記電力変換器を制御し、
前記走行モータが回生電力を発生させるリタード状態または前記走行モータが停止しているアイドリング状態では、前記補助巻線のd軸電流値が前記第2のd軸電流指令値と一致するように前記電力変換器を制御する
ことを特徴とする電気駆動システム。
続きを表示(約 480 文字)
【請求項2】
請求項1に記載の電気駆動システムにおいて、
前記走行モータの加速を指示するアクセル操作装置と、
前記走行モータの減速を指示するブレーキ操作装置と、
前記走行モータの回転数を検出する第1回転数センサとを備え、
前記制御装置は、前記アクセル操作装置が操作されておらず、かつ前記第1回転数センサで検出した前記走行モータの回転数が第1所定値以上の状態、または前記ブレーキ操作装置が操作されている状態を前記リタード状態と判定する
ことを特徴とする電気駆動システム。
【請求項3】
請求項1に記載の電気駆動システムにおいて、
前記走行モータの回転数を検出する第1回転数センサと、
前記発電機の回転数を検出する第2回転数センサとを備え、
前記制御装置は、前記第1回転数センサで検出した前記走行モータの回転数が第1所定値未満であり、かつ前記第2回転数センサで検出した前記発電機の回転数が第2所定値未満の状態を前記アイドリング状態と判定する
ことを特徴とする電気駆動システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、二巻線誘導発電機を備えた電気駆動システムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
複数の巻線で回転機を制御するシステムが知られている。例えば、特許文献1には、「エンジンの出力軸上に設けられ主巻線及び補機巻線を有する回転電機と、回転電機をエンジンによって回転駆動することにより車両走行用モータの駆動電力及び/又は主バッテリの充電電力を主巻線にて発生させる発電制御手段と、回転電機が回転駆動しているときに補機巻線に誘起される電圧を利用して補機バッテリを充電する補機充電制御手段と、を備えることを特徴とするシリーズハイブリッド車の補機バッテリ充電装置」が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平8-289406号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
主巻線と補助巻線を有する固定子を備えた誘導発電機(二巻線誘導発電機)では、主巻線側の負荷(主機の要求電力)がゼロに近くかつ二巻線誘導発電機の回転数が低い状態で、主巻線側の直流電圧の指令値に応じてd軸補助巻線電流(励磁電流)を決定すると、補助巻線側の負荷(補機の要求電力)の大きさよっては励磁量が過不足になり、発電効率が悪化してしまう。また、励磁量が不足すると、補助巻線側の直流電圧を維持できなくなり、補助巻線側の負荷を賄うことができなくなる。
【0005】
特許文献1では、回転電機の回転数が所定値以下である場合に、永久磁石による励磁束を強調するよう、主巻線に励磁電流が供給される。これにより、回転電機の回転数が低くても、降圧チョッパ回路の動作可能電圧以上の電圧が補機巻線に誘起されるため、回転電機の回転数如何によらず補機バッテリを充電できる。しかしながら、回転電機の回転数のみに応じて主巻線の励磁電流を決定しているため、補助巻線側の負荷(補機バッテリの要求電力)が増大したときに励磁量が不足する可能性がある。
【0006】
本発明は、上記課題に鑑みてなされたものであり、その目的は、二巻線誘導発電機の回転数及び補助巻線側の負荷の大きさに係わらず、補助巻線側に設けられた1台の電力変換器で、補助巻線側の直流電圧を維持することが可能な電気駆動システムを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、走行モータと、補機と、主巻線と補助巻線とを含む固定子を有する発電機と、前記主巻線に接続され、前記主巻線で発電した交流電圧を第1直流電圧に変換する整流器と、前記整流器に接続され、前記第1直流電圧を交流電圧に変換して前記走行モータに供給する走行用インバータと、前記補助巻線に接続され、前記主巻線および前記補助巻線の電圧を制御するとともに、前記補助巻線で発電した交流電圧を第2直流電圧に変換して前記補機に供給する電力変換器と、前記電力変換器を制御する制御装置とを備えた電気駆動システムにおいて、前記制御装置は、前記第1直流電圧と前記第1直流電圧の指令値とに基づいて前記補助巻線の第1のd軸電流指令値を算出し、前記発電機の回転数と前記補機の要求電力とに基づいて前記補助巻線の第2のd軸電流指令値を算出し、前記走行用インバータから前記走行モータに電力が供給されるトラクション状態では、前記補助巻線のd軸電流値が前記第1のd軸電流指令値と一致するように前記電力変換器を制御し、前記走行モータが回生電力を発生させるリタード状態または前記走行モータが停止しているアイドリング状態では、前記補助巻線のd軸電流値が前記第2のd軸電流指令値と一致するように前記電力変換器を制御するものとする。
【発明の効果】
【0008】
本発明によれば、二巻線誘導発電機を備えた電気駆動システムにおいて、二巻線誘導発電機の回転数及び補助巻線側の負荷の大きさに係わらず、補助巻線側に設けられた1台の電力変換器で、補助巻線側の直流電圧を維持することが可能となる。
【図面の簡単な説明】
【0009】
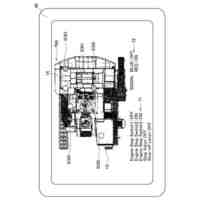
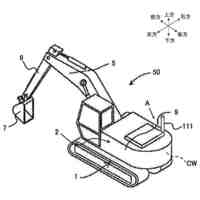
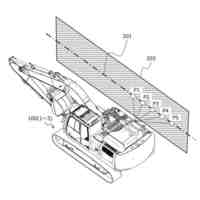
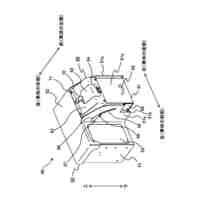
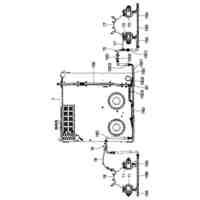
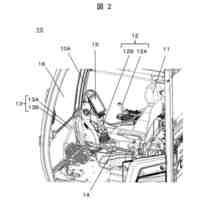
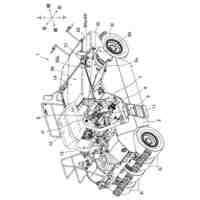
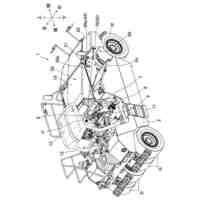
本発明の実施形態におけるダンプトラックの構成を示す図
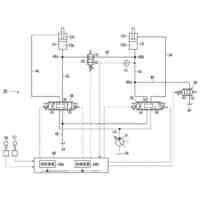
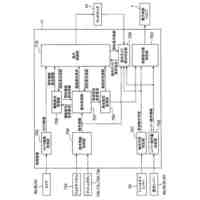
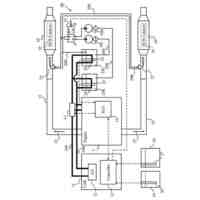
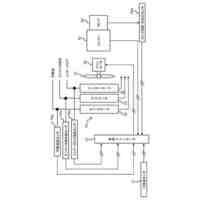
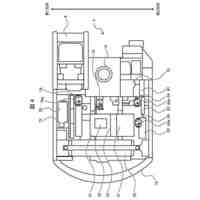
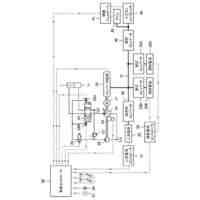
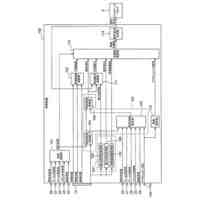
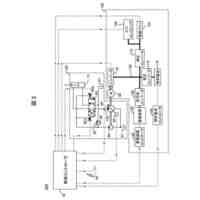
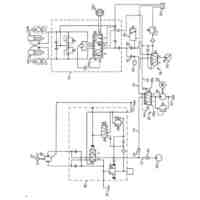
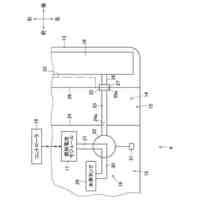
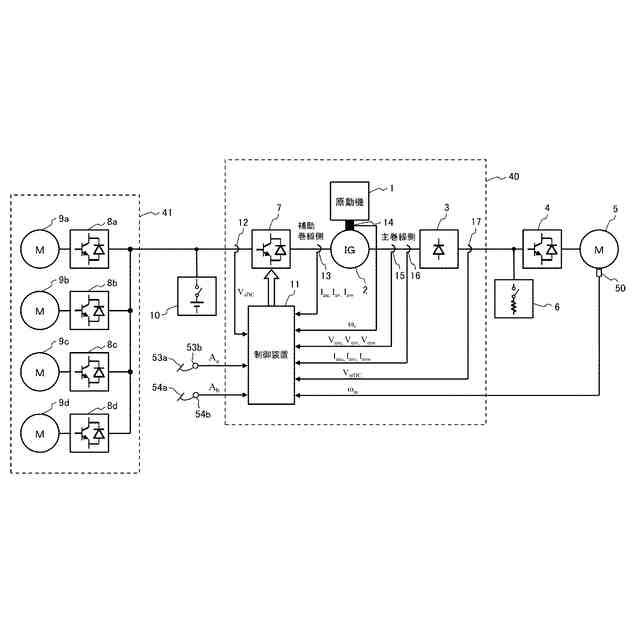
本発明の実施形態における電気駆動システムの構成を示す図
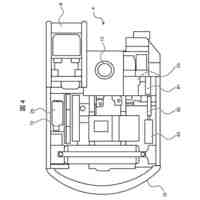
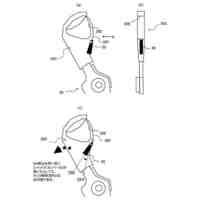
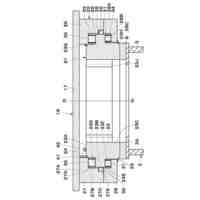
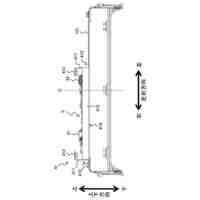
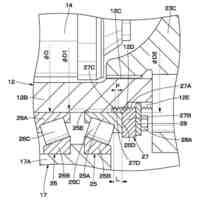
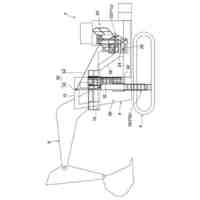
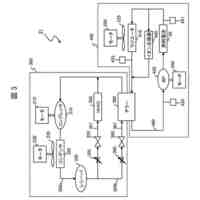
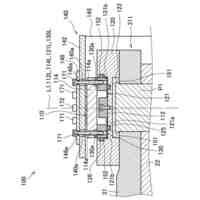
本発明の実施形態における二巻線誘導発電機の構造を示す側面図および部分断面拡大図
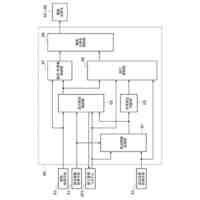
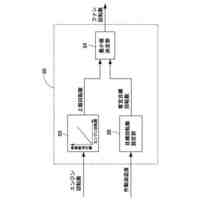
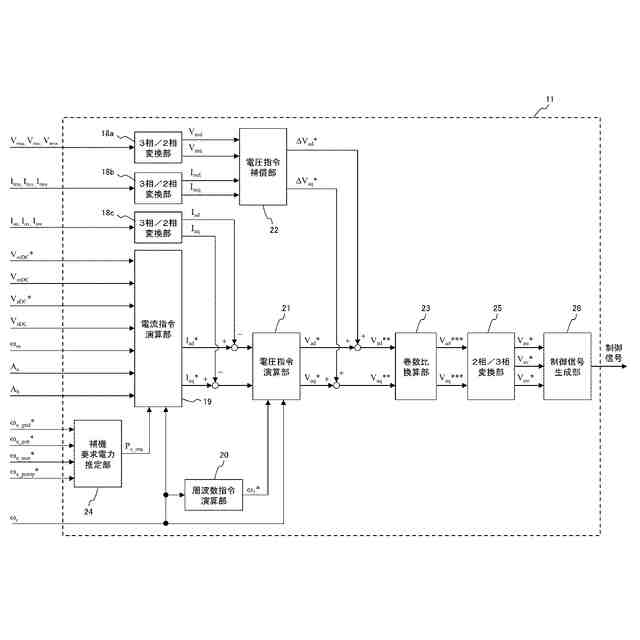
本発明の実施形態における制御装置の機能ブロック図
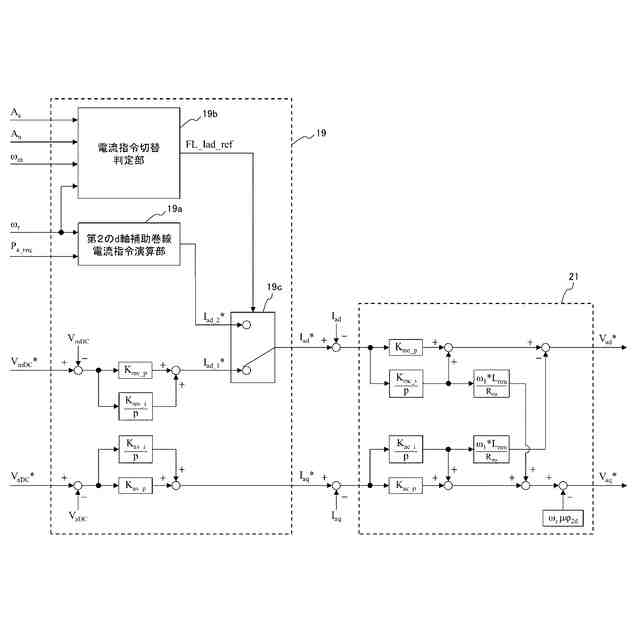
本発明の実施形態における電流指令演算部および電圧指令演算部の処理を示すブロック図
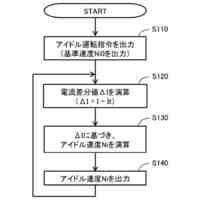
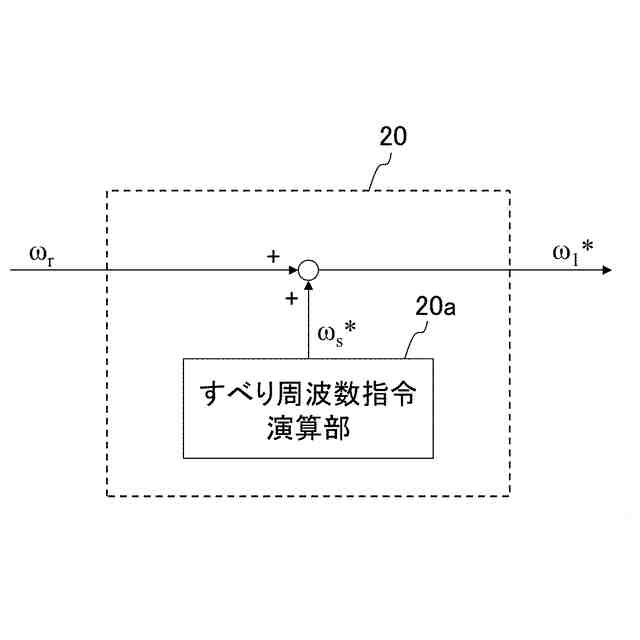
本発明の実施形態における周波数指令演算部の処理を示すブロック図
本発明の実施形態における電圧指令補償部の処理を示すブロック図
本発明の実施形態における電圧指令補償部の処理の変形例を示すブロック図
本発明の実施形態における補機要求電力推定部の処理を示すブロック図
本発明の実施形態における補機要求電力と発電機回転数と第2のd軸補助巻線電流指令値との関係の一例を示す図
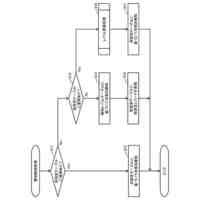
本発明の実施形態における電気駆動システムの各パラメータの時系列変化を示す図
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を用いて説明する。なお、各図中、同等の要素には同一の符号を付し、重複した説明は適宜省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
18日前
日立建機株式会社
建設機械
24日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
建設機械
17日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
建設機械
18日前
日立建機株式会社
建設機械
18日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業車両
18日前
日立建機株式会社
建設機械
10日前
日立建機株式会社
運搬車両
18日前
日立建機株式会社
建設機械
18日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
走行装置
19日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
建設機械
16日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
転圧機械
25日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
転圧機械
25日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
建設機械
16日前
日立建機株式会社
角度検出装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ