TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024127593
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023036843
出願日
2023-03-09
発明の名称
転圧支援システム
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
G01C
21/36 20060101AFI20240912BHJP(測定;試験)
要約
【課題】オペレータの熟練度による転圧作業への影響を抑制し、転圧作業の精度を向上することができる転圧支援システムを提供すること。
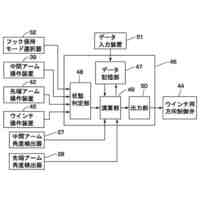
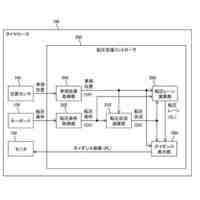
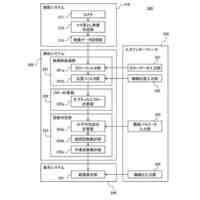
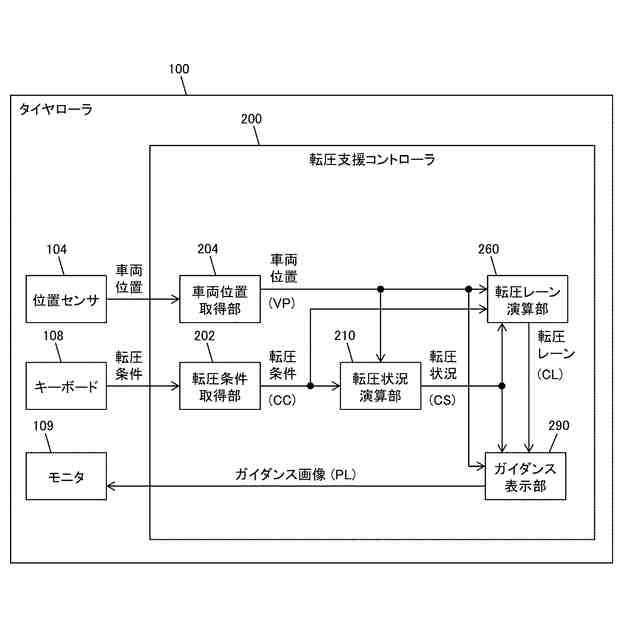
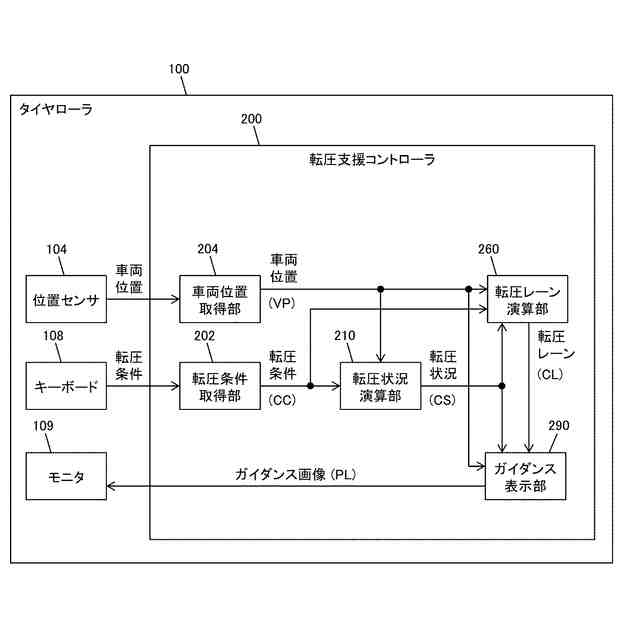
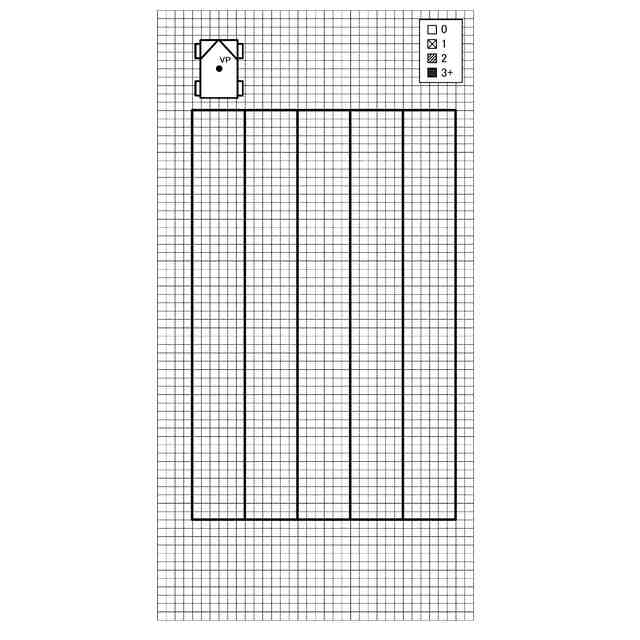
【解決手段】作業現場において締固め機械により通過した範囲の地盤の締固めを行う転圧作業を支援する転圧支援システムにおいて、締固め機械の車両位置を取得する位置情報取得装置と、締固め機械の車両寸法や施工対象の転圧目標値を転圧条件として入力する転圧条件入力装置と、位置情報取得装置が取得した車両位置と、転圧条件入力装置から入力された転圧条件とに基づいて、締固め機械の転圧作業における走路である転圧レーンを演算する転圧支援コントローラと、転圧支援コントローラで演算された締固め機械の転圧レーンと締固め機械の車両位置とを重ねて表示するガイダンス表示装置とを備える。
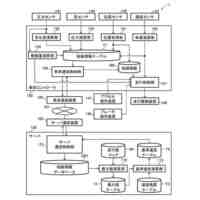
【選択図】 図2
特許請求の範囲
【請求項1】
作業現場において締固め機械により通過した範囲の地盤の締固めを行う転圧作業を支援する転圧支援システムにおいて、
前記締固め機械の車両位置を取得する位置情報取得装置と、
前記締固め機械の車両寸法や施工対象の転圧目標値を転圧条件として入力する転圧条件入力装置と、
前記位置情報取得装置が取得した前記車両位置と、前記転圧条件入力装置から入力された前記転圧条件とに基づいて、前記締固め機械の転圧作業における走路である転圧レーンを演算する転圧支援コントローラと、
前記転圧支援コントローラで演算された前記締固め機械の転圧レーンと前記締固め機械の車両位置とを重ねて表示するガイダンス表示装置と
を備えたことを特徴とする転圧支援システム。
続きを表示(約 1,000 文字)
【請求項2】
請求項1記載の転圧支援システムにおいて、
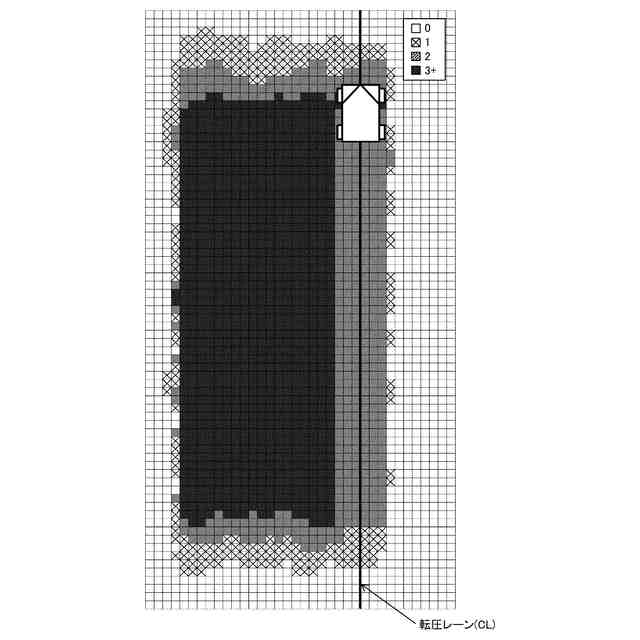
前記転圧支援コントローラは、前記車両位置と前記転圧条件とに基づいて、前記締固め機械が転圧した地盤各所の転圧状況を演算し、
前記ガイダンス表示装置は、前記転圧状況を前記転圧レーンと前記車両位置とにさらに重ねて表示することを特徴とする転圧支援システム。
【請求項3】
請求項1記載の転圧支援システムにおいて、
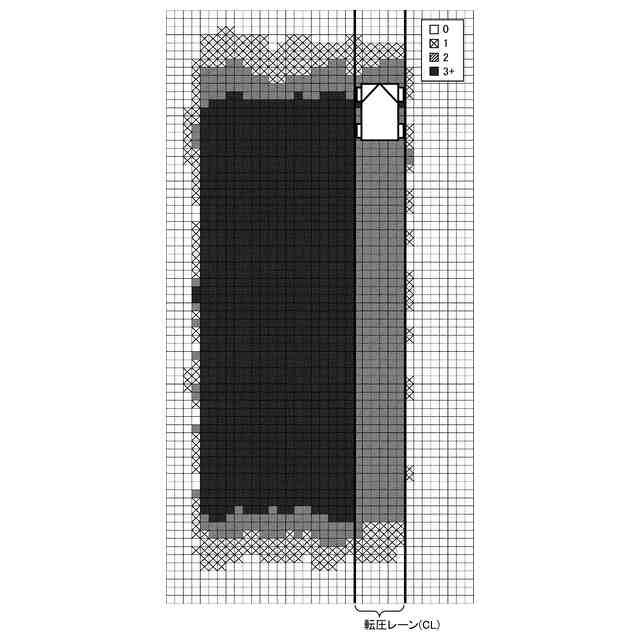
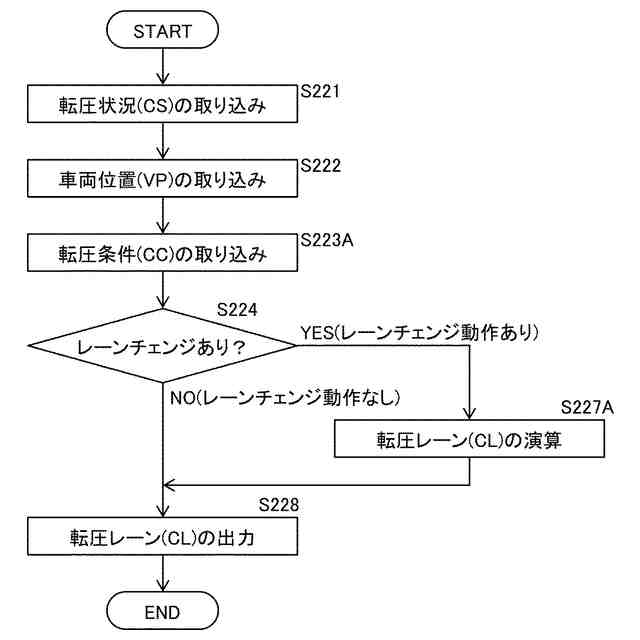
前記転圧支援コントローラは、前記締固め機械が施工する転圧レーンが変わるレーンチェンジ時に次に転圧を施工する転圧レーンを演算することを特徴とする転圧支援システム。
【請求項4】
請求項1記載の転圧支援システムにおいて、
前記転圧支援コントローラは、前記締固め機械が施工する転圧レーンが変わるレーンチェンジ時、又は、前記締固め機械が施工中の転圧レーンで折り返す時に次に転圧を施工する転圧レーンを演算することを特徴とする転圧支援システム。
【請求項5】
請求項1記載の転圧支援システムにおいて、
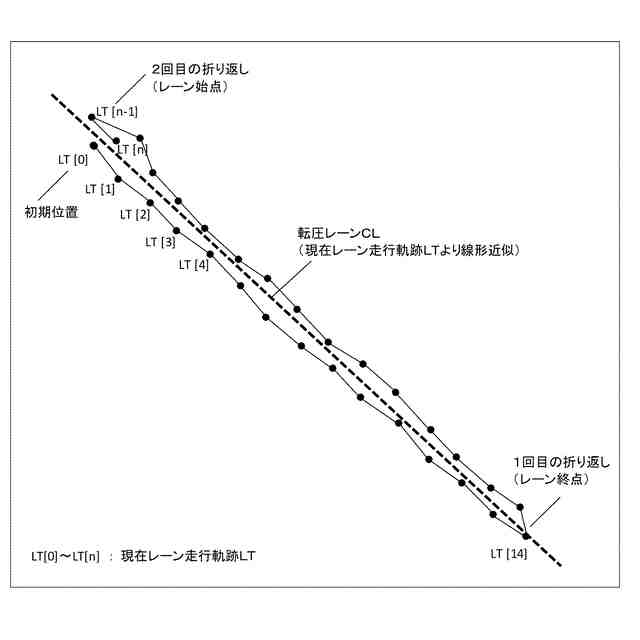
前記転圧支援コントローラは、前記締固め機械が前記転圧レーンを往復走行した際の前記車両位置の軌跡を走行軌跡とし、前記走行軌跡を少なくとも1つの近似直線又は近似曲線で近似することで転圧レーンを推定して出力することを特徴とする転圧支援システム。
【請求項6】
請求項3記載の転圧支援システムにおいて、
前記転圧支援コントローラは、
前記車両位置と前記転圧条件とに基づいて、前記締固め機械が転圧した地盤各所の転圧状況を演算し、
前記転圧条件と前記転圧状況とに基づいて、前記締固め機械が現在走行している転圧レーンとの間の地盤すべてが予め定めた転圧目標値を満たすように次に走行する転圧レーンを演算することを特徴とする転圧支援システム。
【請求項7】
請求項1記載の転圧支援システムにおいて、
前記ガイダンス表示装置は、前記転圧支援コントローラが施工中に演算した転圧レーンの1つ以上を表示し、前記締固め機械の走行動作あるいは転圧作業の進展に応じて各転圧レーンの表示態様を変更することを特徴とする転圧支援システム。
【請求項8】
請求項1記載の転圧支援システムにおいて、
前記ガイダンス表示装置は、前記締固め機械が施工中の転圧レーンと前回の転圧レーンとを異なる表示態様で表示する特徴とする転圧支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、転圧支援システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
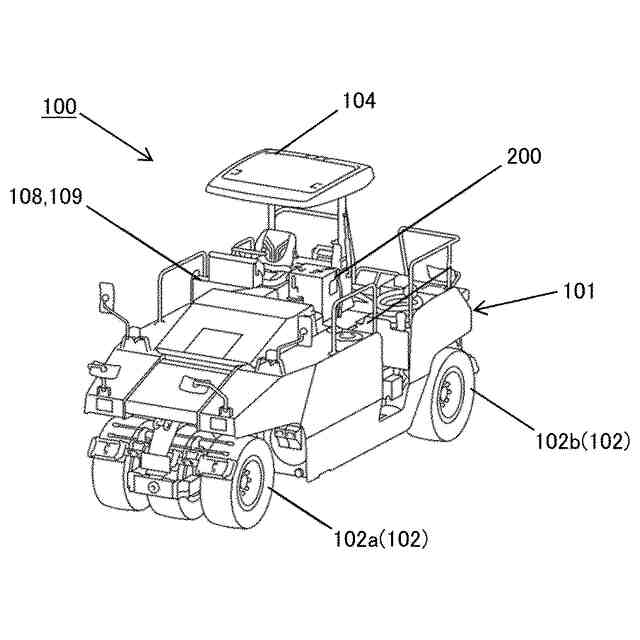
土木現場において転圧作業に従事するロードローラやタイヤローラといった所謂、締固め機械といわれる建設機械は、本体を形成するフレーム、走行用の車輪あるいは履帯を有し、オペレータによる操作指示により所望の転圧作業を行う。
【0003】
このような建設機械では従来、転圧作業の終了後に砂置換法・水置換法・RI法などによる密度測定を行い、転圧作業を行った地盤が規定の密度に達したかを確認することで転圧状況を管理している。しかしながら、この手作業的な管理方法では、多大な労力と時間を要する上に、実際に密度測定を行った場所のみを局所的に管理する事になるので、地盤全体の転圧状況を厳密に管理することが困難であった。
【0004】
こうした実情から近年では、建設機械の転圧回数をもって地盤の転圧状況を管理する方法が開発されており、その一例としてGPS(Global Positioning System)に代表されるGNSS(Global Navigation Satellite System: 全球測位衛星システム)を利用した施工管理システムがある。
【0005】
例えば、特許文献1には、盛土された盛土領域上で振動ローラを複数回移動させて前記盛土を転圧する際に、前記盛土領域を複数の締固め対象区域に区画し、前記盛土が充分に締め固められたか否かを前記締固め対象区域毎に判定する締固め管理方法において、前記盛土領域上における前記振動ローラの移動経路を検出し、前記振動ローラの移動経路から、前記振動ローラの転圧回数を前記締固め対象区域毎に検出する転圧回数検出工程と、前記盛土領域上で前記振動ローラが移動した後に、前記締固め対象区域毎に前記盛土の高さを取得する高さ取得工程と、前記振動ローラが移動した前記締固め対象区域毎に、前回の前記盛土の高さと今回の前記盛土の高さとを用いて前記盛土の沈下量を算出する沈下量算出工程と、前記沈下量算出工程で算出された前記沈下量が所定値未満となった前記締固め対象区域に対して、前記盛土が充分に締め固められたと判定する締固め判定工程と、を備える締固め管理方法が開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2015-52205号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記従来技術においては、GPSで測位した建設機械の位置情報を用いて、建設機械が通過した地盤各所の転圧回数を管理し、さらに地盤各所の沈下量の変化を監視することにより転圧状況を精度良く把握しようとしている。
【0008】
ところで、例えば、熟練度の低いオペレータが施工を行う場合には、現在の転圧状況を把握できたとしても、どのように走行すれば適切に施工できるかを判断することが困難であるため、地盤の踏み残しによる転圧不良や、余分な操舵による地盤の損傷などが生じるおそれがあり、その場合には手戻りによる作業工程の遅れや施工品質の低下などを招いてしまうことが考えられる。
【0009】
本発明は上記に鑑みてなされたものであり、オペレータの熟練度による転圧作業への影響を抑制し、転圧作業の精度を向上することができる転圧支援システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本願は上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、作業現場において締固め機械により通過した範囲の地盤の締固めを行う転圧作業を支援する転圧支援システムにおいて、前記締固め機械の車両位置を取得する位置情報取得装置と、前記締固め機械の車両寸法や施工対象の転圧目標値を転圧条件として入力する転圧条件入力装置と、前記位置情報取得装置が取得した前記車両位置と、前記転圧条件入力装置から入力された前記転圧条件とに基づいて、前記締固め機械の転圧作業における走路である転圧レーンを演算する転圧支援コントローラと、前記転圧支援コントローラで演算された前記締固め機械の転圧レーンと前記締固め機械の車両位置とを重ねて表示するガイダンス表示装置とを備えたものとする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
22日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
運搬車両
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
建設機械
17日前
日立建機株式会社
建設機械
16日前
日立建機株式会社
深礎掘削機
19日前
日立建機株式会社
ダンプトラック
9日前
日立建機株式会社
ダンプトラック
9日前
日立建機株式会社
ダンプトラック
8日前
日立建機株式会社
ダンプトラック
8日前
日立建機株式会社
転圧支援システム
1日前
日立建機株式会社
自律走行システム
16日前
日立建機株式会社
可変容量型液圧回転機
17日前
日立建機株式会社
建設機械のモニタリングシステム
1日前
日立建機株式会社
遠隔操作型作業機械システム及び作業機械
22日前
日立建機株式会社
車両制御システム及びそれを備える運搬車両
1日前
株式会社コロナ
石油ストーブ
1日前
個人
電気抵抗の測定方法
9日前
株式会社トプコン
測量装置
24日前
太陽誘電株式会社
検出装置
12日前
太陽誘電株式会社
検出装置
29日前
株式会社トプコン
測量装置
1日前
エイブリック株式会社
半導体装置
26日前
株式会社トプコン
測量装置
24日前
日本碍子株式会社
ガスセンサ
22日前
北陽電機株式会社
光電センサ
8日前
CKD株式会社
錠剤検査装置
16日前
株式会社東芝
センサ
12日前
株式会社キーエンス
超音波流量センサ
12日前
株式会社日立国際電気
試験装置
26日前
大和製衡株式会社
組合せ計量装置
2日前
大陽日酸株式会社
液面センサ
22日前
ニデック株式会社
測定用治具
9日前
ローム株式会社
磁気検出装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ