TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024127659
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023037000
出願日
2023-03-09
発明の名称
車両制御システム及びそれを備える運搬車両
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
B60W
30/17 20200101AFI20240912BHJP(車両一般)
要約
【課題】運搬車両の作業効率の低下を抑えつつ、走行中に車体に作用する負荷を低減可能な車両制御システムを提供する。
【解決手段】車両制御システムは、走行路内の運搬車両の走行を制御する制御装置を備え、制御装置は、運搬車両の走行路内の位置を表す車体位置データと、走行路の路面の状態を表す路面状態データと、運搬車両の車体に作用している負荷を表す車体負荷データと、を取得し、路面状態データ、車体負荷データ及び車体位置データに基づき、走行路を走行する際における運搬車両の位置に対応する運搬車両の走行速度の基準となる基準速度を演算し、基準速度を運搬車両の走行速度の上限または目標として運搬車両の走行制御を行う。
【選択図】図5
特許請求の範囲
【請求項1】
走行路内の運搬車両の走行を制御する制御装置を備えた車両制御システムにおいて、
前記制御装置は、
前記運搬車両の前記走行路内の位置を表す車体位置データと、前記走行路の路面の状態を表す路面状態データと、前記運搬車両の車体に作用している負荷を表す車体負荷データと、を取得し、
前記路面状態データ、前記車体負荷データ及び前記車体位置データに基づき、前記走行路を走行する際における前記運搬車両の位置に対応する前記運搬車両の走行速度の基準となる基準速度を演算し、
前記基準速度を前記運搬車両の走行速度の上限または目標として前記運搬車両の走行制御を行う
ことを特徴とする車両制御システム。
続きを表示(約 2,100 文字)
【請求項2】
請求項1に記載の車両制御システムにおいて、
前記車体負荷データは、前記運搬車両が前記走行路を走行するときに前記車体に発生する応力であり、
前記制御装置は、前記応力が大きいほど前記基準速度を小さくする
ことを特徴とする車両制御システム。
【請求項3】
請求項2に記載の車両制御システムにおいて、
前記路面状態データは、前記走行路の路面の劣化度であり、
前記制御装置は、前記劣化度が大きいほど前記基準速度を小さくする
ことを特徴とする車両制御システム。
【請求項4】
請求項1に記載の車両制御システムにおいて、
前記制御装置には、空荷走行状態の前記運搬車両の走行速度の制御に用いられる前記基準速度である空荷基準速度と、積荷走行状態の前記運搬車両の走行速度の制御に用いられる前記基準速度である積荷基準速度と、が前記路面状態データ及び前記車体負荷データに対応付けられた速度換算テーブルが記憶され、
前記制御装置は、前記運搬車両から、前記運搬車両に積載されている積載物の重量に関する情報を取得し、前記積載物の重量に基づいて前記空荷基準速度及び前記積荷基準速度から選択した速度を前記基準速度として前記運搬車両の走行制御を行う
ことを特徴とする車両制御システム。
【請求項5】
請求項4に記載の車両制御システムにおいて、
前記速度換算テーブルには、前記基準速度と天候状況とが対応付けられて記録されており、
前記制御装置は、外部から前記走行路を含む作業現場の気象情報を取得し、前記速度換算テーブルを用いて前記走行路の天候状況に対応する前記基準速度を読み出して前記運搬車両の走行制御を行う
ことを特徴とする車両制御システム。
【請求項6】
請求項1に記載の車両制御システムにおいて、
前記制御装置は、前記走行路を走行する複数の前記運搬車両の走行制御を行うように構成され、
前記制御装置には、前記走行路が複数の区間に区分されるように前記走行路を含む作業現場が複数の領域に区画された走行路マップと、前記複数の領域の各々に対する前記基準速度が記録された基準速度テーブルと、が記憶され、
前記制御装置は、
前記複数の前記運搬車両の各々から、前記路面状態データ、前記車体負荷データ及び前記車体位置データを収集し、
収集した前記路面状態データ、前記車体負荷データ及び前記車体位置データに基づき、前記走行路の前記複数の区間ごとに前記基準速度を読み出して前記複数の前記運搬車両の走行制御を行う
ことを特徴とする車両制御システム。
【請求項7】
請求項1に記載の車両制御システムにおいて、
前記路面状態データは、前記走行路の路面の劣化度であり、
前記車体負荷データは、前記運搬車両が前記走行路を走行するときに前記車体に発生する応力であり、
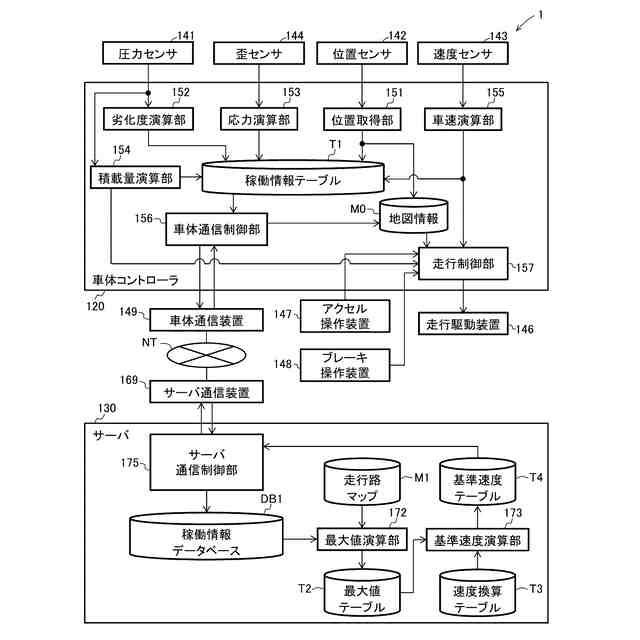
前記制御装置は、前記運搬車両に設けられる車体コントローラと、前記運搬車両の外部に設けられるサーバと、を有し、
前記車体コントローラは、
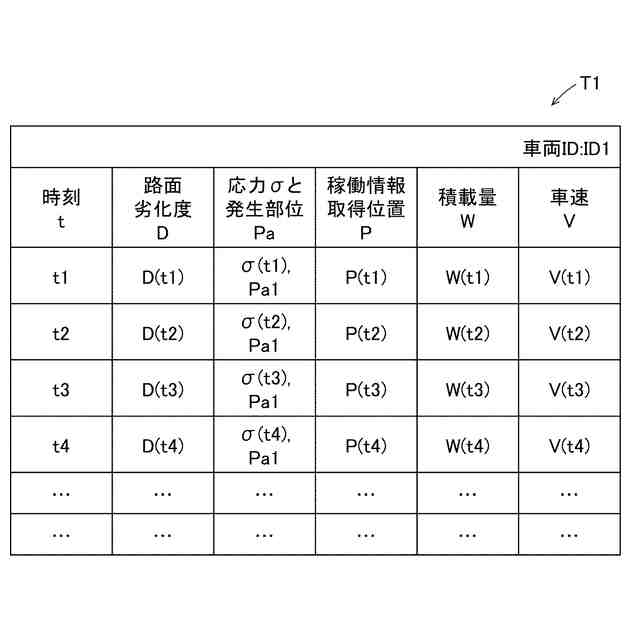
前記車体の位置を検出する位置センサを含む複数のセンサからセンサ信号を取得し、
前記センサ信号に基づき、前記劣化度及び前記応力を演算し、演算した前記劣化度及び前記応力を前記車体の位置と対応付けて記憶し、
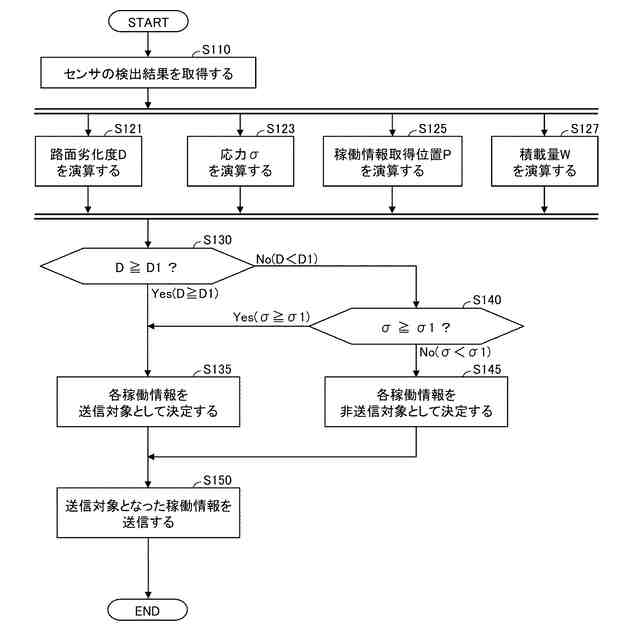
前記劣化度が劣化度閾値未満であり、かつ前記応力が応力閾値未満であるか否かを判定し、
前記劣化度が前記劣化度閾値未満であり、かつ前記応力が前記応力閾値未満であると判定された場合には、その判定に用いた前記劣化度及び前記応力を送信対象から除外し、
前記劣化度が前記劣化度閾値以上であると判定された場合には、その判定に用いた前記劣化度と、該劣化度に対応付けられた前記応力とを送信対象とし、
前記応力が前記応力閾値以上であると判定された場合には、その判定に用いた前記応力と、該応力に対応付けられた前記劣化度とを送信対象とし、
前記送信対象とされた前記劣化度及び前記応力を前記車体の位置とともに前記サーバに送信し、
前記サーバには、前記走行路が複数の区間に区分された走行路マップが記憶され、
前記サーバは、
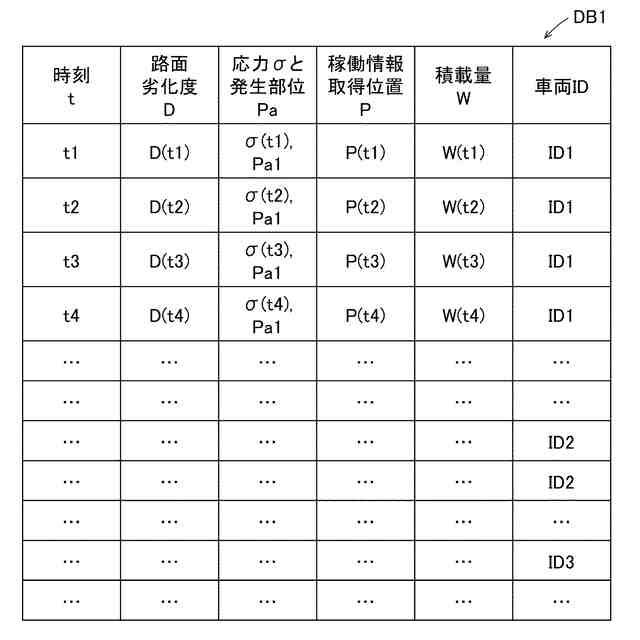
複数の前記運搬車両から送信された前記劣化度、前記応力及び前記車体の位置を収集し、
収集した前記劣化度、前記応力及び前記車体の位置に基づき、前記複数の区間ごとに前記基準速度を演算し、
前記複数の区間ごとに演算された前記基準速度を前記運搬車両に送信し、
前記車体コントローラは、前記基準速度に基づいて、前記運搬車両の走行速度を制御する
ことを特徴とする車両制御システム。
【請求項8】
請求項1に記載の車両制御システムを備える運搬車両であって、
前記制御装置は、前記基準速度に基づいて、前記車体の走行速度を制御する
ことを特徴とする運搬車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御システム及びそれを備える運搬車両に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
走行路の路面が劣化して凹凸などが形成されると、荒れた走行路を走行するダンプトラック等の運搬車両の燃費の悪化、車体へのダメージなどの悪影響が出る。このため、走行路の路面の劣化を抑制する発明が提案されている(特許文献1参照)。
【0003】
特許文献1には、走行路の路面の劣化を低減させる車両運用を実行可能とする路面管理システムが開示されている。路面管理システムは、走行路の路面劣化度の変化率が所定の閾値を超えた時間帯の情報を集計する。路面管理システムは、集計した情報に基づき、出現回数が所定回数よりも多い気象情報(例えば、雨)、センサ出力値(例えば、アクセル開度が所定値より大きくなる走行操作)等を劣化条件として記憶する。その後、路面管理システムは、稼働情報と劣化条件とを比較することによって、劣化条件を満たす可能性があるか否かを判定する。劣化条件を満たす可能性があると判定された場合には、車両において、アクセル開度を減少させる制御が行われる。あるいは、車両において、アクセル開度を減少させる走行操作の実行をオペレータに促すための通知が行われる。
【先行技術文献】
【特許文献】
【0004】
特開2020-052835号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明は、路面劣化度の変化率を監視することにより、走行路の更なる劣化を抑制するものである。このため、例えば、既に走行路に凹凸が形成されている場合には、その凹凸の上を運搬車両が通過する際に、車体に負荷が作用することになる。このため、特許文献1に記載の発明では、車両が荒地等を走行する際に車体に作用する負荷を低減するという観点では改善の余地がある。
【0006】
本発明は、運搬車両の作業効率の低下を抑えつつ、走行中に車体に作用する負荷を低減可能な車両制御システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様による車両制御システムは、走行路内の運搬車両の走行を制御する制御装置を備え、前記制御装置は、前記運搬車両の前記走行路内の位置を表す車体位置データと、前記走行路の路面の状態を表す路面状態データと、前記運搬車両の車体に作用している負荷を表す車体負荷データと、を取得し、前記路面状態データ、前記車体負荷データ及び前記車体位置データに基づき、前記走行路を走行する際における前記運搬車両の位置に対応する前記運搬車両の走行速度の基準となる基準速度を演算し、前記基準速度を前記運搬車両の走行速度の上限または目標として前記運搬車両の走行制御を行う。
【発明の効果】
【0008】
本発明によれば、運搬車両の作業効率の低下を抑えつつ、走行中に車体に作用する負荷を低減可能な車両制御システムを提供することができる。
【図面の簡単な説明】
【0009】
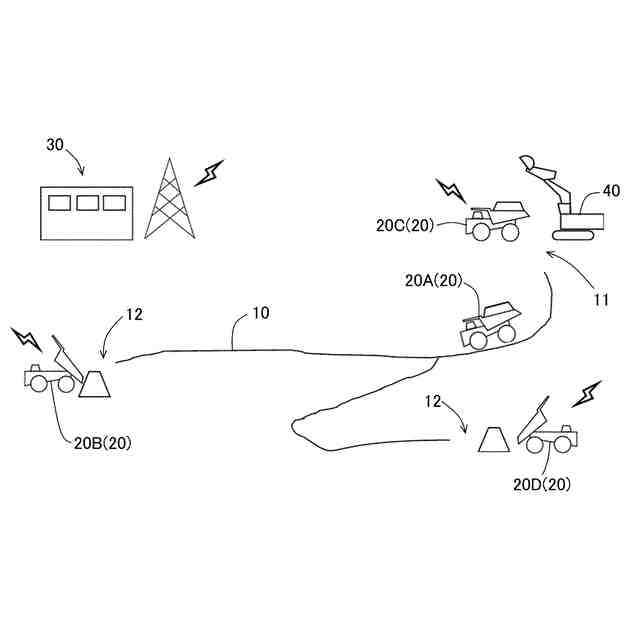
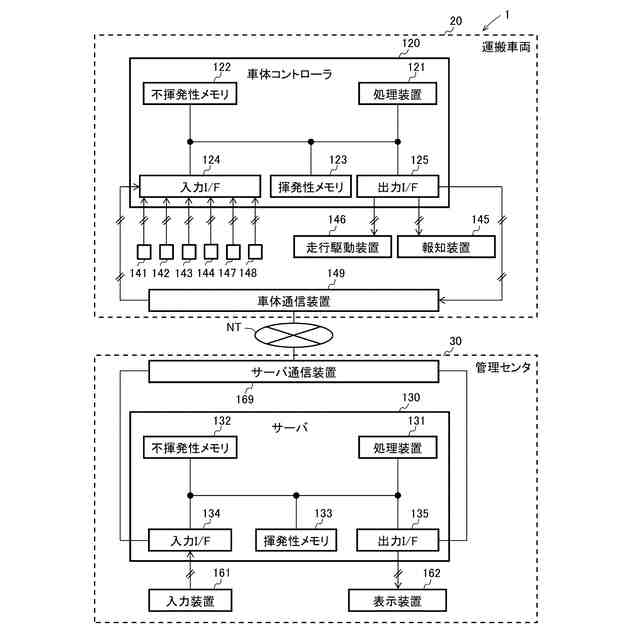
図1は、作業現場で作業を行う運搬車両と、運搬車両の管理を行う管理センタとを示す図である。
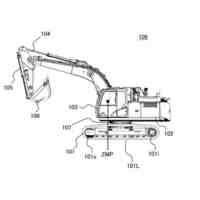
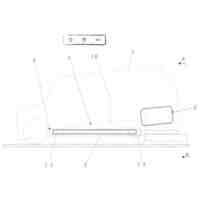
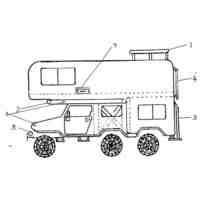
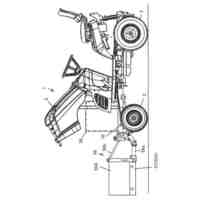
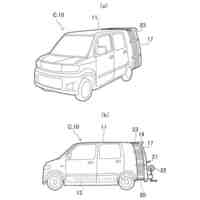
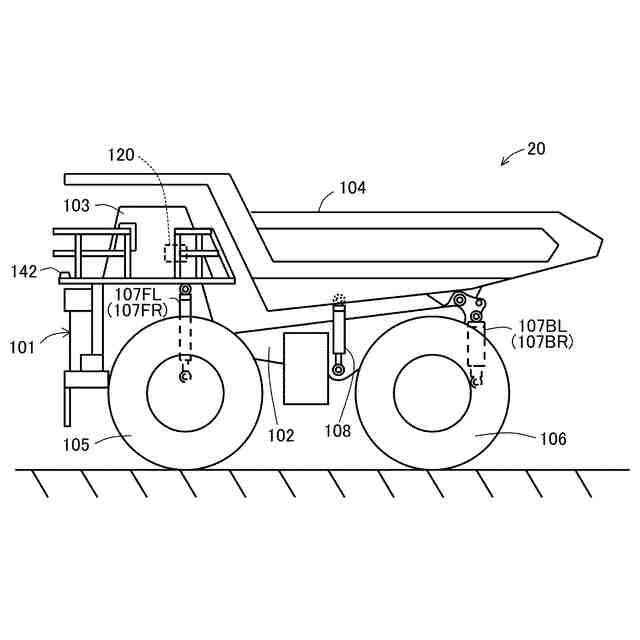
図2は、第1実施形態に係る運搬車両の側面図である。
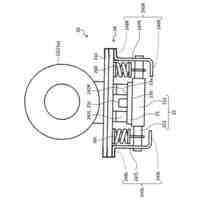
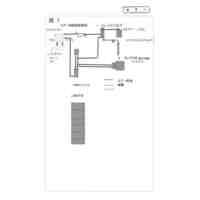
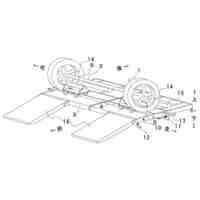
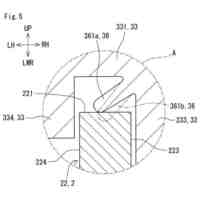
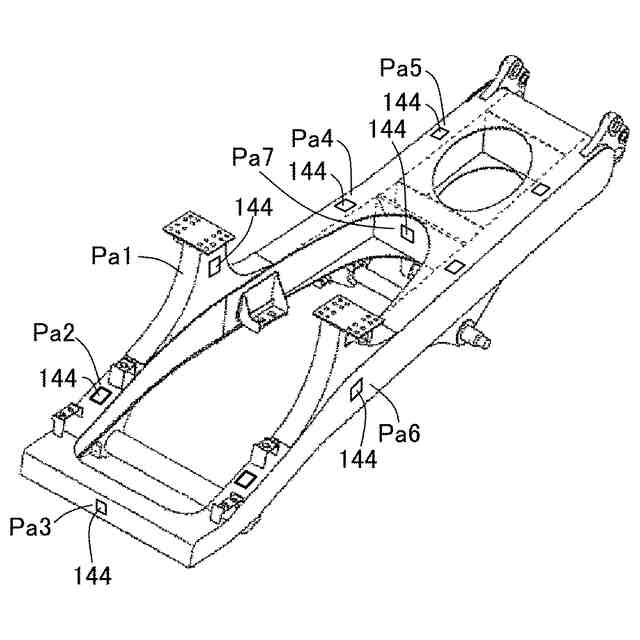
図3は、車体フレームの斜視図である。
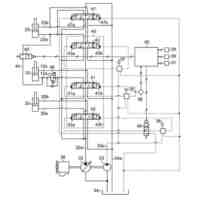
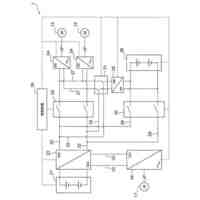
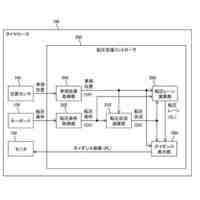
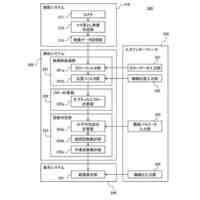
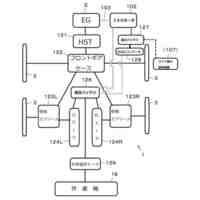
図4は、第1実施形態に係る車両制御システムの構成図である。
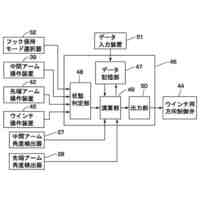
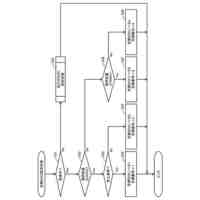
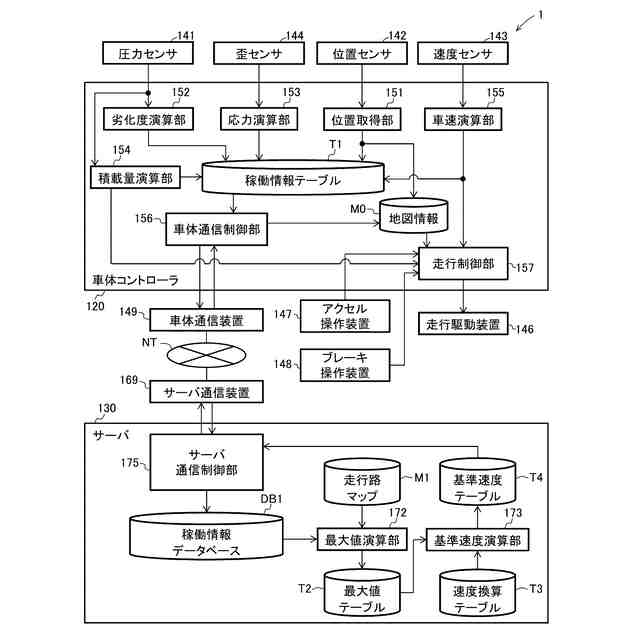
図5は、第1実施形態に係る車両制御システムの機能ブロック図である。
図6は、稼働情報テーブルの一例を示す図である。
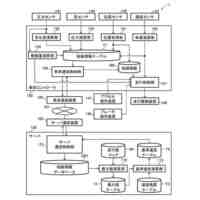
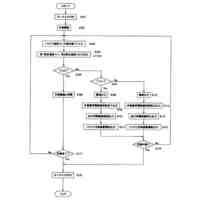
図7は、車体コントローラにより実行される稼働情報の送信処理の流れの一例について示すフローチャートである。
図8は、稼働情報データベースの一例を示す図である。
図9は、走行路マップの一例を示す図である。
図10は、最大値テーブルの一例を示す図である。
図11は、速度換算テーブルの一例を示す図である。
図12は、基準速度テーブルの一例を示す図である。
図13は、作業中の運搬車両の状態遷移図である。
図14は、第2実施形態に係る車両制御システムの機能ブロック図である。
図15は、天候状況に応じた路面劣化度の時間変化の一例について示す図である。
図16は、第2実施形態に係る速度換算テーブルの一例を示す図である。
【発明を実施するための形態】
【0010】
図面を参照して、本発明の実施形態に係る車両制御システムについて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
1日前
日立建機株式会社
運搬車両
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
建設機械
16日前
日立建機株式会社
建設機械
17日前
日立建機株式会社
深礎掘削機
19日前
日立建機株式会社
ダンプトラック
8日前
日立建機株式会社
ダンプトラック
8日前
日立建機株式会社
ダンプトラック
9日前
日立建機株式会社
ダンプトラック
9日前
日立建機株式会社
転圧支援システム
1日前
日立建機株式会社
自律走行システム
16日前
日立建機株式会社
可変容量型液圧回転機
17日前
日立建機株式会社
建設機械のモニタリングシステム
1日前
日立建機株式会社
車両制御システム及びそれを備える運搬車両
1日前
個人
車両用エアー傘
2か月前
個人
電池交換式自動車
1か月前
個人
自動車盗難防止装置
2か月前
個人
移動手段のミラーカバー。
1か月前
東レ株式会社
車両用エアバッグ
1日前
日本精機株式会社
表示システム
19日前
個人
連結式、キャンピングカー
1か月前
日本精機株式会社
運転支援装置
18日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
個人
車両の座席装置
2か月前
井関農機株式会社
作業車両
2か月前
ダイハツ工業株式会社
レバー
1か月前
個人
セパレート型キャンピングカー
2か月前
豊田合成株式会社
車両
1日前
日本化薬株式会社
ガス発生器
1か月前
スズキ株式会社
車両制御装置
29日前
豊田合成株式会社
車両
1日前
アピオ株式会社
荷物用支持具
2か月前
株式会社コーワ
フィルター清掃装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ