TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024123485
公報種別
公開特許公報(A)
公開日
2024-09-12
出願番号
2023030937
出願日
2023-03-01
発明の名称
ダンプトラック
出願人
日立建機株式会社
代理人
弁理士法人武和国際特許事務所
主分類
H02J
7/00 20060101AFI20240905BHJP(電力の発電,変換,配電)
要約
【課題】二種類の蓄電装置を備えるダンプトラックを、充放電処理を中断することなく走行させる技術を提供する。
【解決手段】ダンプトラックは、車体と、荷台と、電力を蓄電する第1蓄電装置と、第1蓄電装置より出力特性が劣り且つ蓄電可能量が多い第2蓄電装置と、第1蓄電装置及び第2蓄電装置の少なくとも一方に蓄電された電力によってタイヤを回転させる走行モータと、走行モータに対する電力の入出力の変化に追従して第1蓄電装置に充放電させると共に、第1蓄電装置の充電率が目標充電率に近づくように第2蓄電装置に充放電させる充放電処理を実行するコントローラとを備える。コントローラは、充放電処理を繰り返し実行する過程において、ダンプトラックの現在の動作状態に基づいて次の動作状態を推定し、第1蓄電装置の目標充電率を、推定した次の動作状態に対応する値に更新する。
【選択図】図5
特許請求の範囲
【請求項1】
タイヤの回転によって走行する車体と、
積荷を積載する着座姿勢及び積荷を放出する放出姿勢に姿勢変化が可能な荷台と、
電力を蓄電する第1蓄電装置と、
前記第1蓄電装置より出力特性が劣り且つ蓄電可能量が多い第2蓄電装置と、
前記第1蓄電装置及び前記第2蓄電装置の少なくとも一方に蓄電された電力によって、前記タイヤを回転させる走行モータと、
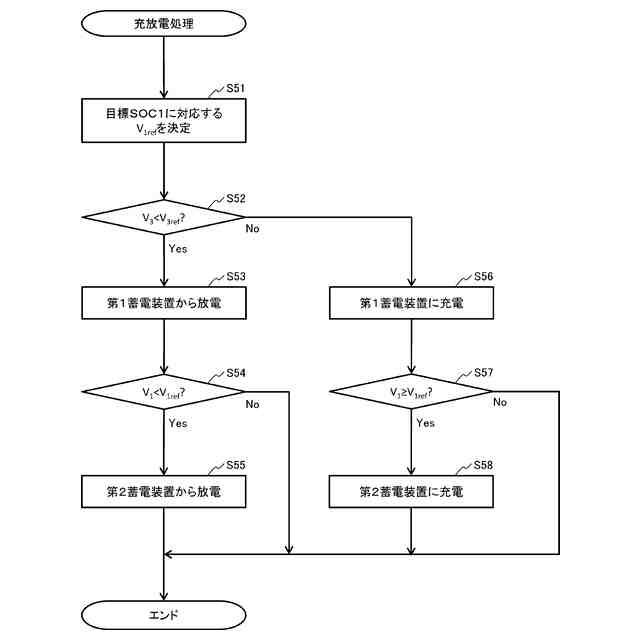
前記走行モータに対する電力の入出力の変化に追従して前記第1蓄電装置に充放電させると共に、前記第1蓄電装置の充電率が目標充電率に近づくように前記第2蓄電装置に充放電させる充放電処理を実行するコントローラとを備えるダンプトラックにおいて、
前記コントローラは、前記充放電処理を繰り返し実行する過程において、
前記ダンプトラックの現在の動作状態に基づいて次の動作状態を推定し、
前記第1蓄電装置の前記目標充電率を、推定した次の動作状態に対応する値に更新することを特徴とするダンプトラック。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載のダンプトラックにおいて、
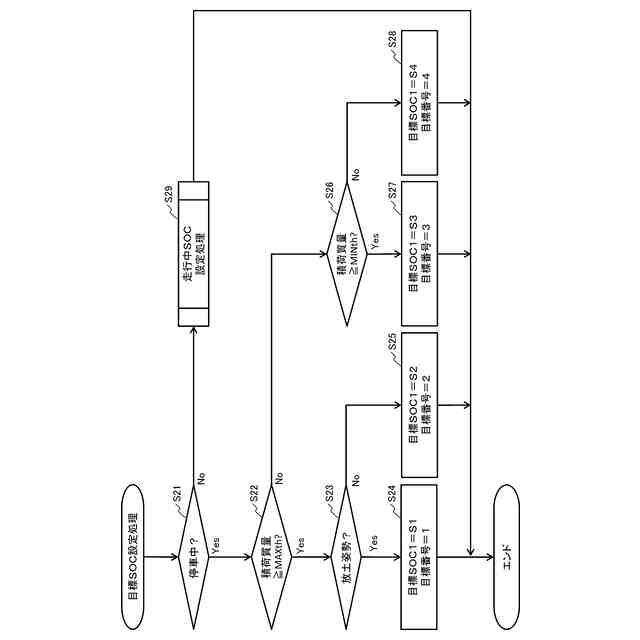
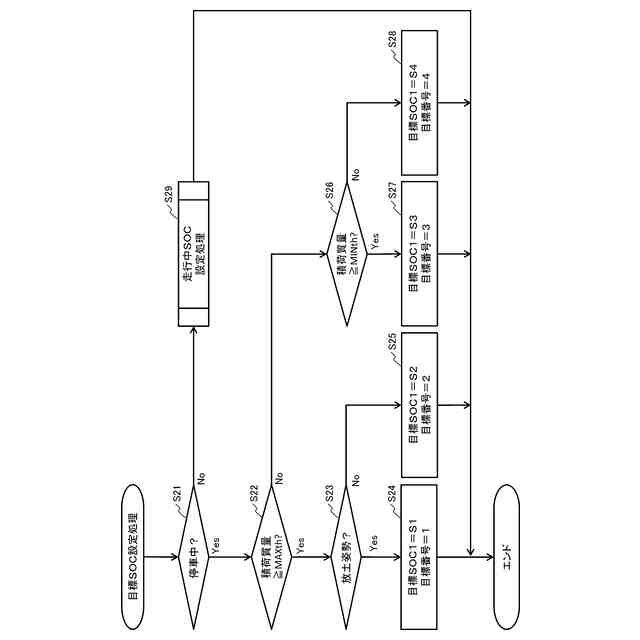
前記コントローラは、前記ダンプトラックの現在の動作状態が停車中で且つ前記荷台の積荷質量が上限閾値以上である場合において、
前記荷台が前記放出姿勢であれば、次の動作状態を空荷状態での走行と推定して、前記第1蓄電装置の前記目標充電率を第1目標充電率に設定し、
前記荷台が前記着座姿勢であれば、次の動作状態を積荷状態での走行と推定して、前記第1蓄電装置の前記目標充電率を前記第1目標充電率より大きい第2目標充電率に設定することを特徴とするダンプトラック。
【請求項3】
請求項1に記載のダンプトラックにおいて、
前記コントローラは、前記ダンプトラックの現在の動作状態が停車中で且つ前記荷台の積荷質量が上限閾値未満である場合において、
前記積荷質量が下限閾値以上であれば、次の動作状態を積荷状態での走行と推定して、前記第1蓄電装置の前記目標充電率を第3目標充電率に設定し、
前記積荷質量が前記下限閾値未満であれば、次の動作状態を空荷状態での走行と推定して、前記第1蓄電装置の前記目標充電率を前記第3目標充電率より小さい第4目標充電率に設定することを特徴とするダンプトラック。
【請求項4】
請求項1に記載のダンプトラックにおいて、
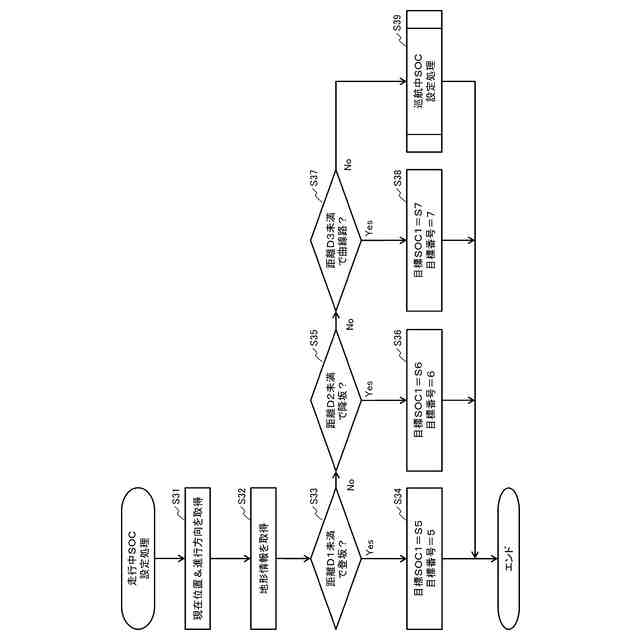
前記コントローラは、前記ダンプトラックの現在の動作状態が走行中である場合において、
前記ダンプトラックの進行方向の第1距離未満に登坂の入口がある場合に、次の動作状態を力行走行と推定して、前記第1蓄電装置の前記目標充電率を第5目標充電率に設定し、
前記ダンプトラックの進行方向の第2距離未満に降坂の入口がある場合に、次の動作状態を回生走行と推定して、前記第1蓄電装置の前記目標充電率を前記第5目標充電率より小さい第6目標充電率に設定し、
前記ダンプトラックの進行方向の第3距離未満に曲線路の入口がある場合に、次の動作状態を回生走行と推定して、前記第1蓄電装置の前記目標充電率を前記第5目標充電率より小さく且つ前記第6目標充電率より大きい第7目標充電率に設定することを特徴とするダンプトラック。
【請求項5】
請求項1に記載のダンプトラックにおいて、
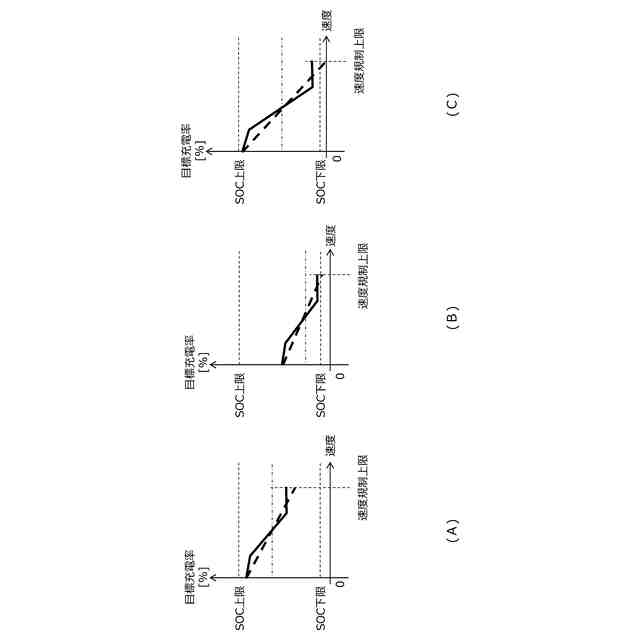
前記ダンプトラックの速度が速いほど前記第1蓄電装置の前記目標充電率が小さくなる第1充電率マップと、
前記ダンプトラックの速度が速いほど前記第1蓄電装置の前記目標充電率が小さくなり、且つ前記目標充電率の平均値が前記第1充電率マップより小さい第2充電率マップと、
前記ダンプトラックの速度が速いほど前記第1蓄電装置の前記目標充電率が小さくなり、且つ前記目標充電率の変化率が前記第1充電率マップ及び前記第2充電率マップより大きい第3充電率マップとを記憶するメモリを備え、
前記コントローラは、
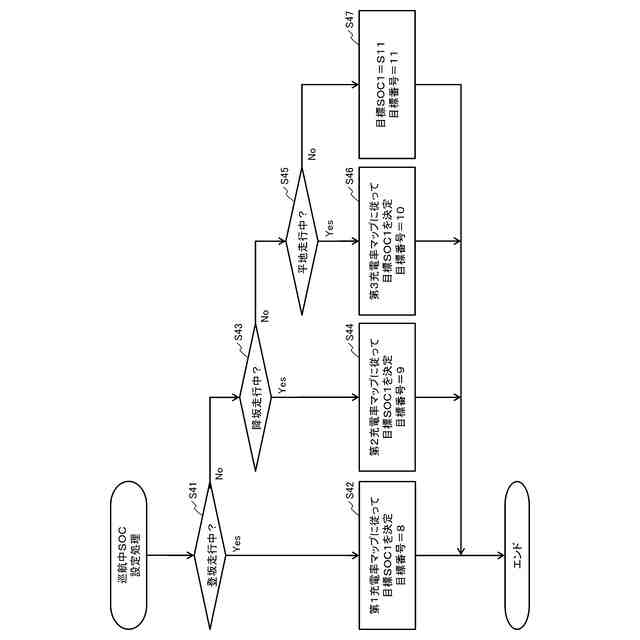
前記ダンプトラックの現在の動作状態が登坂を走行中である場合に、次の動作状態を力行走行と推定して、前記第1蓄電装置の前記目標充電率を前記第1充電率マップに従って第8目標充電率に設定し、
前記ダンプトラックの現在の動作状態が降坂を走行中である場合に、次の動作状態を回生走行と推定して、前記第1蓄電装置の前記目標充電率を前記第2充電率マップに従って第9目標充電率に設定し、
前記ダンプトラックの現在の動作状態が平地を走行中である場合に、次の動作状態を力行走行または回生走行と推定して、前記第1蓄電装置の前記目標充電率を前記第3充電率マップに従って第10目標充電率に設定することを特徴とするダンプトラック。
【請求項6】
請求項1に記載のダンプトラックにおいて、
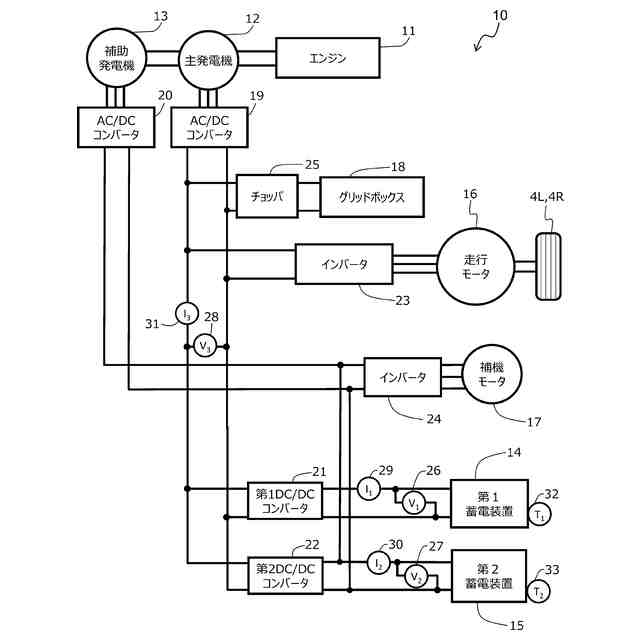
前記第1蓄電装置は、第1DC/DCコンバータを介して前記走行モータに接続され、
前記第2蓄電装置は、前記第1DC/DCコンバータに直列に接続された第2DC/DCコンバータを介して、前記第1蓄電装置と並列に前記走行モータに接続されていることを特徴とするダンプトラック。
【請求項7】
請求項1に記載のダンプトラックにおいて、
前記第1蓄電装置は、第1DC/DCコンバータを介して前記走行モータに接続され、
前記第2蓄電装置は、前記第1DC/DCコンバータと並列に接続された第2DC/DCコンバータを介して、前記第1蓄電装置と並列に前記走行モータに接続されていることを特徴とするダンプトラック。
発明の詳細な説明
【技術分野】
【0001】
本発明は、二種類の蓄電池を備えるダンプトラックに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来より、露天掘り鉱山などで使用されるダンプトラックには、回生時に走行モータから出力される電力を蓄電し、力行時に走行モータに電力を供給する蓄電装置が搭載される。但し、出力特性に優れる蓄電装置は蓄電可能量(容量)が少なく、容量が多い蓄電装置は出力特性が劣る傾向がある。そのため、必要な出力特性及び容量を一種類の蓄電装置のみで実現しようとすると、ダンプトラックの小型化及び軽量化が阻害される。
【0003】
そこで、出力特性に優れる第1蓄電装置と、容量が大きい第2蓄電装置とを協調して制御することによって、ダンプトラックを小型化及び軽量化する技術がある(例えば、特許文献1を参照)。より詳細には、特許文献1では、走行モータに対する電力の入出力の変化を吸収するように第1蓄電装置に充放電させ、第1蓄電装置の充電率が予め定められた目標充電率に近づくように第2蓄電装置に充放電させる充放電処理が行われる。
【先行技術文献】
【特許文献】
【0004】
特許第6173412号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1では前述の充放電処理を常に実行しているので、ダンプトラックの回生時に第1蓄電装置が満充電になったり、ダンプトラックの力行時に第1蓄電装置が空充電になると、充放電処理を中断して走行に支障が生じるという課題がある。
【0006】
本発明は、上記した実状に鑑みてなされたものであり、その目的は、二種類の蓄電装置を備えるダンプトラックを、充放電処理を中断することなく走行させる技術を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、タイヤの回転によって走行する車体と、積荷を積載する着座姿勢及び積荷を放出する放出姿勢に姿勢変化が可能な荷台と、電力を蓄電する第1蓄電装置と、前記第1蓄電装置より出力特性が劣り且つ蓄電可能量が多い第2蓄電装置と、前記第1蓄電装置及び前記第2蓄電装置の少なくとも一方に蓄電された電力によって、前記タイヤを回転させる走行モータと、前記走行モータに対する電力の入出力の変化に追従して前記第1蓄電装置に充放電させると共に、前記第1蓄電装置の充電率が目標充電率に近づくように前記第2蓄電装置に充放電させる充放電処理を実行するコントローラとを備えるダンプトラックにおいて、前記コントローラは、前記充放電処理を繰り返し実行する過程において、前記ダンプトラックの現在の動作状態に基づいて次の動作状態を推定し、前記第1蓄電装置の前記目標充電率を、推定した次の動作状態に対応する値に更新することを特徴とする。
【発明の効果】
【0008】
本発明によれば、二種類の蓄電装置を備えるダンプトラックを、充放電処理を中断することなく走行させることができる。なお、上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
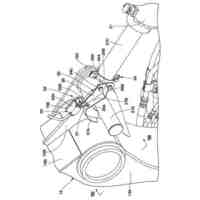
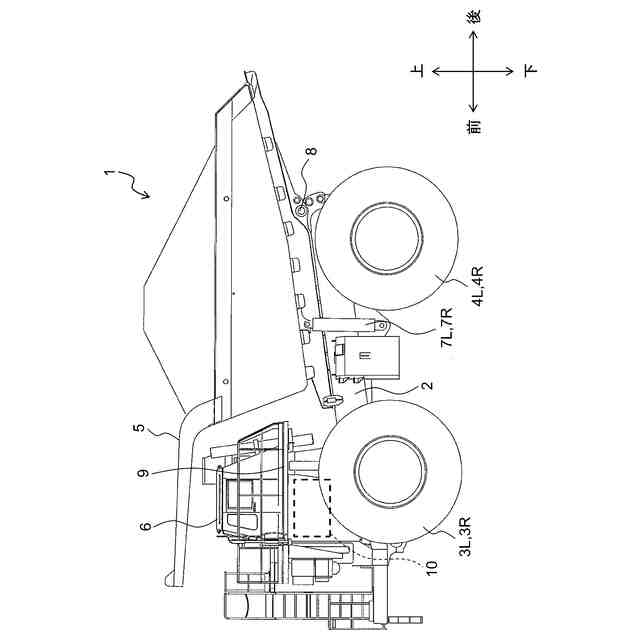
本実施形態に係るダンプトラックの側面図である。
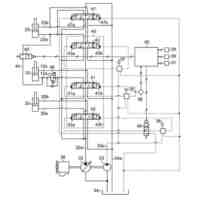
ダンプトラックに搭載される駆動回路の回路図である。
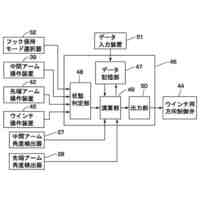
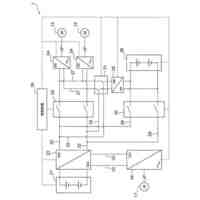
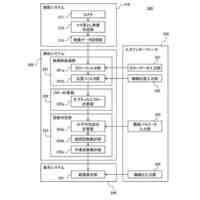
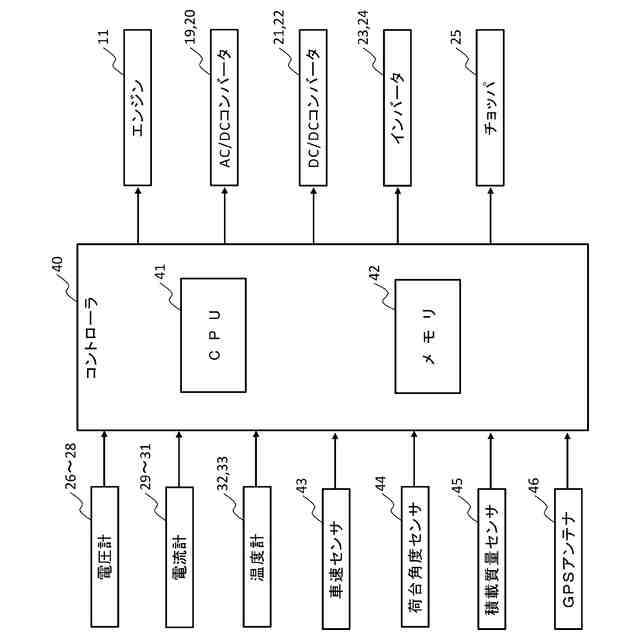
ダンプトラックのハードウェア構成図である。
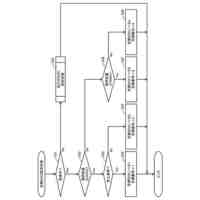
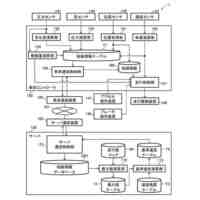
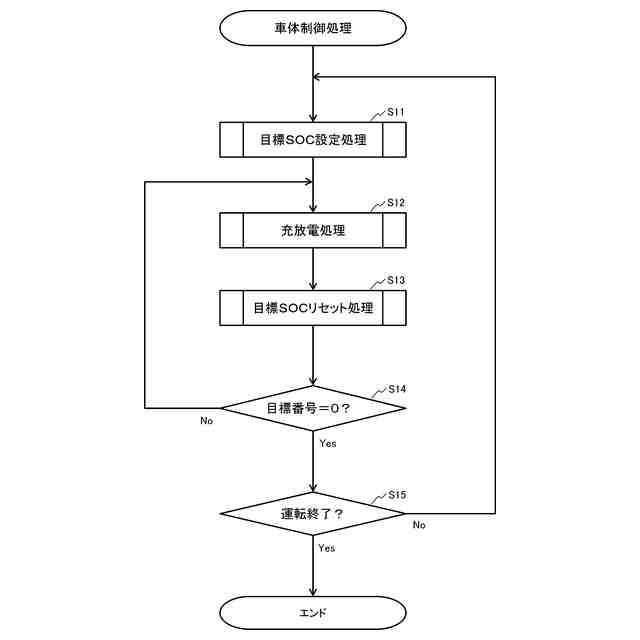
車体制御処理のフローチャートである。
目標SOC設定処理のフローチャートである。
走行中SOC設定処理のフローチャートである。
巡航中SOC設定処理のフローチャートである。
第1~第3充電率マップの例を示す図である。
充放電処理のフローチャートである。
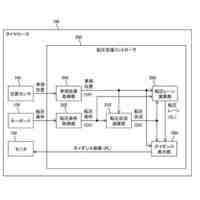
充放電処理を実現するコントローラの機能ブロック図である。
目標SOCリセット処理のフローチャートである。
走行中SOCリセット処理のフローチャートである。
変形例1に係る駆動回路の回路図である。
変形例2に係る駆動回路の回路図である。
変形例3に係る駆動回路の回路図である。
ダンプトラックの走行中における目標SOC1の推移を示す図である。
図2及び図14の駆動回路における電圧及び電流の推移である。
図13及び図15の駆動回路における電圧及び電流の推移である。
【発明を実施するための形態】
【0010】
本発明に係るダンプトラックの実施形態について、図面を用いて説明する。図1は、本実施形態に係るダンプトラック1の側面図である。なお、本明細書中の前後左右は、特に断らない限り、ダンプトラック1に搭乗して操作するオペレータの視点を基準としている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
17日前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
22日前
日立建機株式会社
建設機械
16日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
運搬車両
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
深礎掘削機
19日前
日立建機株式会社
深礎掘削機
1か月前
日立建機株式会社
ダンプトラック
8日前
日立建機株式会社
ダンプトラック
8日前
日立建機株式会社
ダンプトラック
9日前
日立建機株式会社
ダンプトラック
9日前
日立建機株式会社
転圧支援システム
1日前
日立建機株式会社
自律走行システム
16日前
日立建機株式会社
可変容量型液圧回転機
17日前
日立建機株式会社
可変容量型液圧回転機
1か月前
日立建機株式会社
建設機械のモニタリングシステム
1日前
日立建機株式会社
遠隔操作型作業機械システム及び作業機械
22日前
日立建機株式会社
車両制御システム及びそれを備える運搬車両
1日前
個人
原動機
22日前
個人
ファラデー発電改良型
8日前
キヤノン電子株式会社
モータ
1日前
株式会社タツノ
充電装置
24日前
ニデック株式会社
モータ
12日前
キヤノン株式会社
制御装置
1日前
トヨタ自動車株式会社
ロータ
2日前
サンデン株式会社
電力変換装置
19日前
サンデン株式会社
電力変換装置
19日前
株式会社ダイヘン
溶接機
18日前
ダイハツ工業株式会社
冷却装置
9日前
本田技研工業株式会社
回転電機
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ