TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024127315
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023036395
出願日
2023-03-09
発明の名称
制御装置
出願人
キヤノン株式会社
代理人
個人
主分類
H02N
2/06 20060101AFI20240912BHJP(電力の発電,変換,配電)
要約
【課題】振動体と接触体との相対的な移動の遅れを抑制できるようにする。
【解決手段】制御装置は、電気-機械エネルギー変換素子に互いに位相差を有する複数の信号が印加されることにより振動が励起される振動体の振動により、前記振動体と前記振動体に接触する接触体とが相対的に移動する振動型アクチュエータの駆動を制御する制御装置であって、前記振動体と前記接触体とが相対的に移動をしていない状態で、前記複数の信号の位相差を第1の位相差に制御し、前記振動体と前記接触体とを相対的に移動開始させる第1の制御部を有し、前記第1の位相差は、前記振動体と前記接触体とが相対に移動を開始する直後の前記振動体と前記接触体との相対位置又は相対速度が、目標位置又は目標速度に対して、正負符号が逆とならない位相差である。
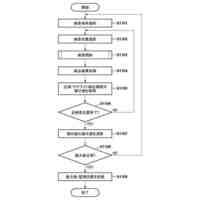
【選択図】図6
特許請求の範囲
【請求項1】
電気-機械エネルギー変換素子に互いに位相差を有する複数の信号が印加されることにより振動が励起される振動体の振動により、前記振動体と前記振動体に接触する接触体とが相対的に移動する振動型アクチュエータの駆動を制御する制御装置であって、
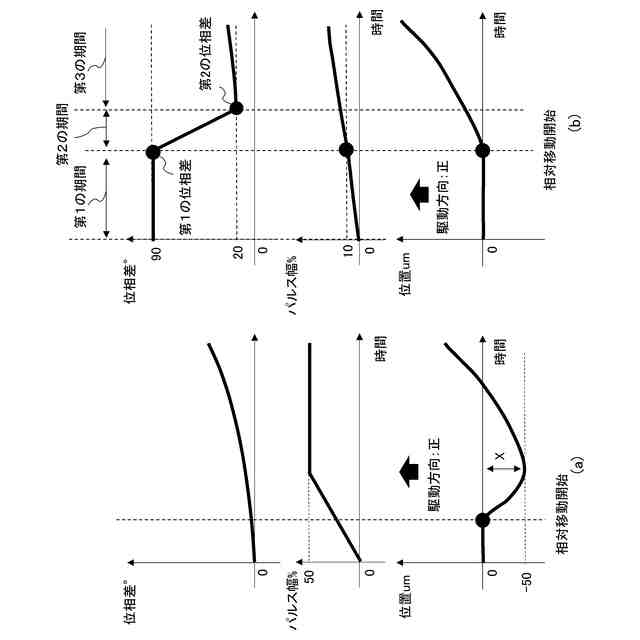
前記振動体と前記接触体とが相対的に移動をしていない状態から移動を開始するまでの第1の期間では、前記複数の信号の位相差を第1の位相差に制御する第1の制御部と、
前記振動体と前記接触体とが相対的に移動を開始した後の第2の期間では、前記複数の信号の位相差が、前記第1の位相差から、前記第1の位相差の絶対値よりも小さい絶対値を有する第2の位相差に遷移するように、前記複数の信号の位相差を制御する第2の制御部と、
前記複数の信号の位相差が前記第2の位相差に遷移後の第3の期間では、前記振動体と前記接触体との相対位置又は相対速度と、目標位置又は目標速度とに基づいて、前記複数の信号の位相差を制御する第3の制御部と
を有することを特徴とする制御装置。
続きを表示(約 1,200 文字)
【請求項2】
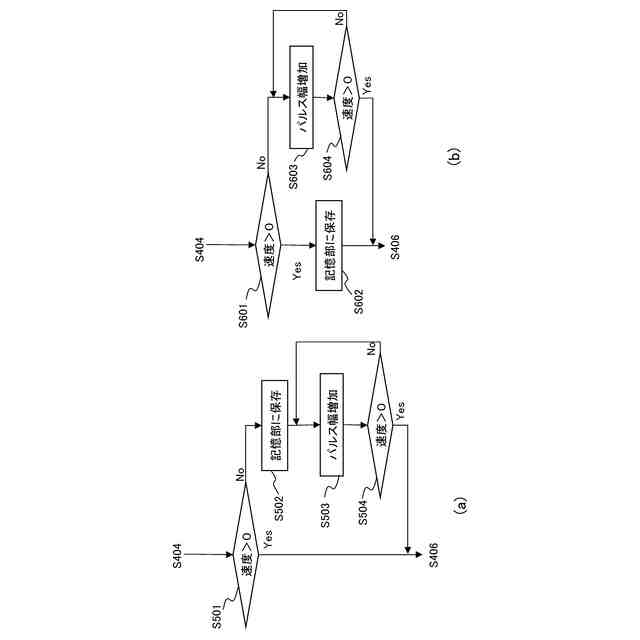
前記第1の制御部は、前記第1の期間では、前記振動体と前記接触体とが相対的に移動を開始するまで、前記複数の信号のパルス幅又は振幅を増加させるように制御し、
前記第3の制御部は、前記第3の期間では、前記振動体と前記接触体との相対位置又は相対速度と、目標位置又は目標速度とに基づいて、前記複数の信号の位相差と、前記複数の信号のパルス幅又は振幅を制御することを特徴とする請求項1に記載の制御装置。
【請求項3】
前記第3の制御部は、前記第3の期間では、前記振動体と前記接触体との相対位置又は相対速度と、目標位置又は目標速度とに基づいて、前記複数の信号の位相差と、前記複数の信号のパルス幅又は振幅と、前記複数の信号の周波数を制御することを特徴とする請求項1に記載の制御装置。
【請求項4】
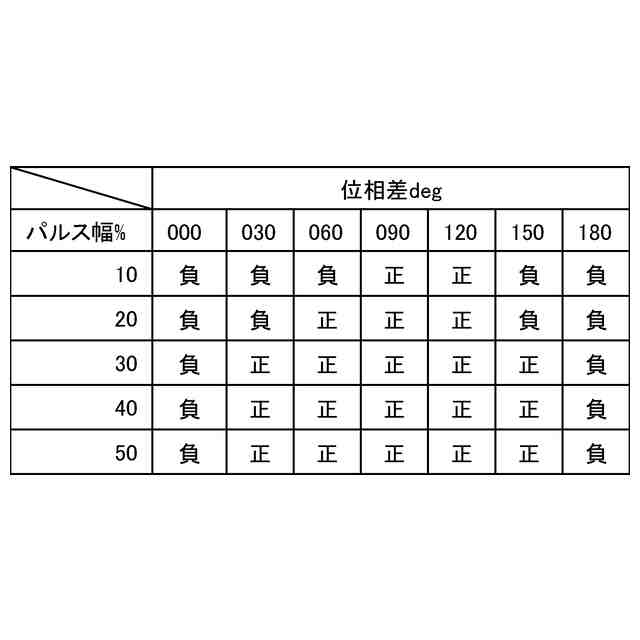
前記第1の位相差は、前記振動体と前記接触体とが相対に移動を開始する直後の前記振動体と前記接触体との相対位置又は相対速度が、目標位置又は目標速度に対して、正負符号が逆とならない位相差であることを特徴とする請求項1に記載の制御装置。
【請求項5】
前記第1の位相差は、前記正負符号が逆とならない位相差の中で、前記振動体の接触部の楕円運動が前記振動型アクチュエータの駆動方向と水平な方向の振幅よりも駆動方向と交差する方向の振幅の方が大きい位相差帯の上限値を超え、かつ、駆動方向と交差する方向の振幅よりも駆動方向と水平な方向の振幅の方が大きい位相差帯の下限値未満であることを特徴とする請求項4に記載の制御装置。
【請求項6】
前記第1の位相差は、前記正負符号が逆とならない位相差の中の下限値以上、かつ、上限値以下であることを特徴とする請求項4に記載の制御装置。
【請求項7】
前記第2の位相差は、前記振動体と前記接触体との相対位置又は相対速度と、目標位置又は目標速度とに基づいて、演算される前記複数の信号の位相差であることを特徴とする請求項1に記載の制御装置。
【請求項8】
前記第1の制御部は、前記第1の期間では、前記複数の信号の位相差として前記第1の位相差を維持し、前記複数の信号のパルス幅又は振幅を徐々に増加させるように制御することを特徴とする請求項1に記載の制御装置。
【請求項9】
前記第2の制御部は、前記第2の期間では、前記複数の信号のパルス幅又は振幅が、前記振動体と前記接触体との相対位置又は相対速度と、目標位置又は目標速度とに基づいて、演算される前記複数の信号のパルス幅又は振幅に近づくように、前記複数の信号のパルス幅又は振幅を制御することを特徴とする請求項1に記載の制御装置。
【請求項10】
前記第2の制御部は、前記第2の期間では、前記複数の信号のパルス幅又は振幅を維持又は増加させるように制御することを特徴とする請求項1に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、電子機器、制御装置の制御方法及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から、振動体と被駆動体とを加圧接触させ、振動体に励振させた振動によって振動体と被駆動体とを相対的に移動させる振動型アクチュエータが知られている。このような振動型アクチュエータの駆動を制御する方法として、高速側を2相の駆動信号の周波数を変化させ、低速側を該2相の駆動信号の位相差を変化させる周波数・位相差制御がある。しかしながら、0°又は180°付近の位相差領域では、駆動状態が不安定となって発生する駆動力が小さくなることで停止する、いわゆる速度の不感帯となり、この不感帯の影響により振動型アクチュエータの起動が遅れることがある。このような振動型アクチュエータを用いた駆動機構の制御における応答性の向上を図る技術が提案されている。
【0003】
例えば、特許文献1には、振動型アクチュエータの起動性を向上させるため、速度の不感帯の境界の位相差を初期位相差として設定し、駆動開始時にこの初期位相差から位相差制御を行う方法が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2017-123708号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、高倍率のズームレンズ鏡筒のようにイナーシャが大きなものを駆動させる場合、動き始めや停止時などの位相差が小さく駆動方向への推進力である送り振動を多く伴わない状態においては、駆動方向とは逆の方向に動いてしまうことがある。
【0006】
本開示の目的は、振動体と接触体との相対的な移動の遅れを抑制できるようにすることである。
【課題を解決するための手段】
【0007】
制御装置は、電気-機械エネルギー変換素子に互いに位相差を有する複数の信号が印加されることにより振動が励起される振動体の振動により、前記振動体と前記振動体に接触する接触体とが相対的に移動する振動型アクチュエータの駆動を制御する制御装置であって、前記振動体と前記接触体とが相対的に移動をしていない状態から移動を開始するまでの第1の期間では、前記複数の信号の位相差を第1の位相差に制御する第1の制御部と、前記振動体と前記接触体とが相対的に移動を開始した後の第2の期間では、前記複数の信号の位相差が、前記第1の位相差から、前記第1の位相差の絶対値よりも小さい絶対値を有する第2の位相差に遷移するように、前記複数の信号の位相差を制御する第2の制御部と、前記複数の信号の位相差が前記第2の位相差に遷移後の第3の期間では、前記振動体と前記接触体との相対位置又は相対速度と、目標位置又は目標速度とに基づいて、前記複数の信号の位相差を制御する第3の制御部とを有する。
【発明の効果】
【0008】
本開示によれば、振動体と接触体との相対的な移動の遅れを抑制することができる。
【図面の簡単な説明】
【0009】
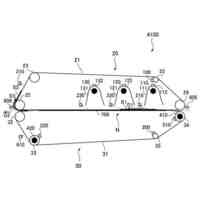
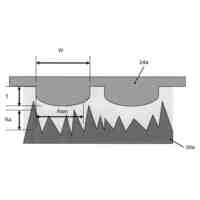
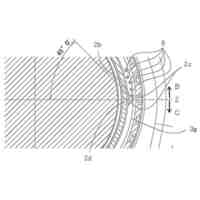
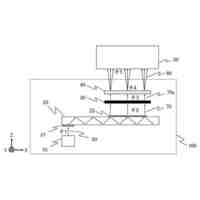
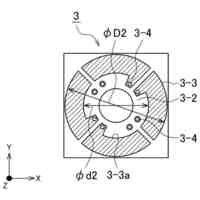
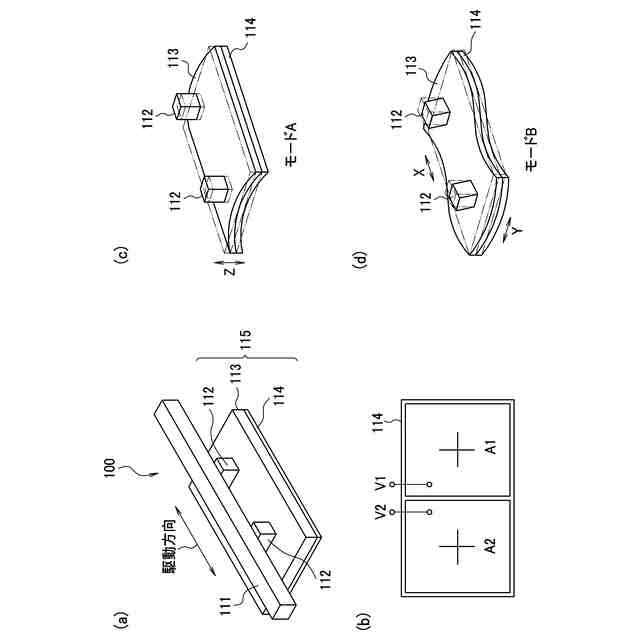
振動型アクチュエータの構成例を示す図である。
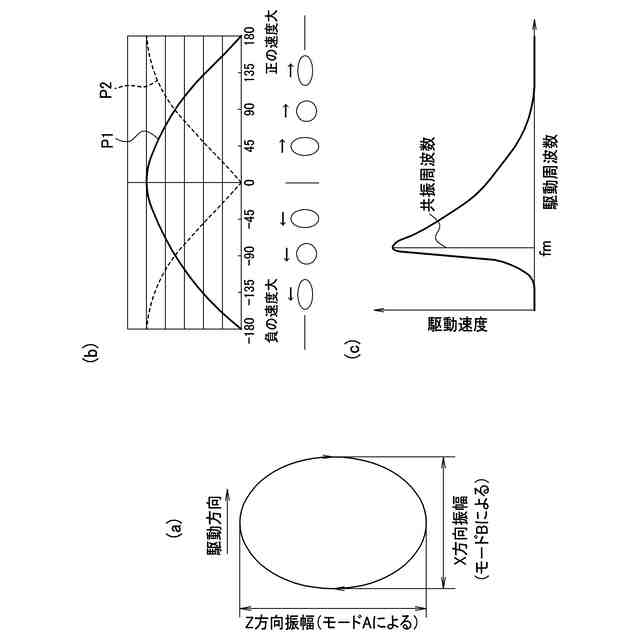
振動体を構成する突起部の先端に励起される楕円運動を説明する図である。
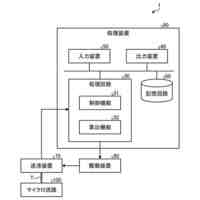
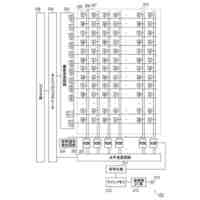
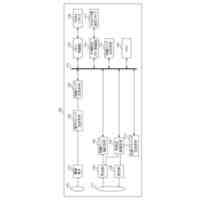
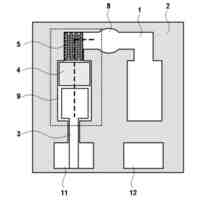
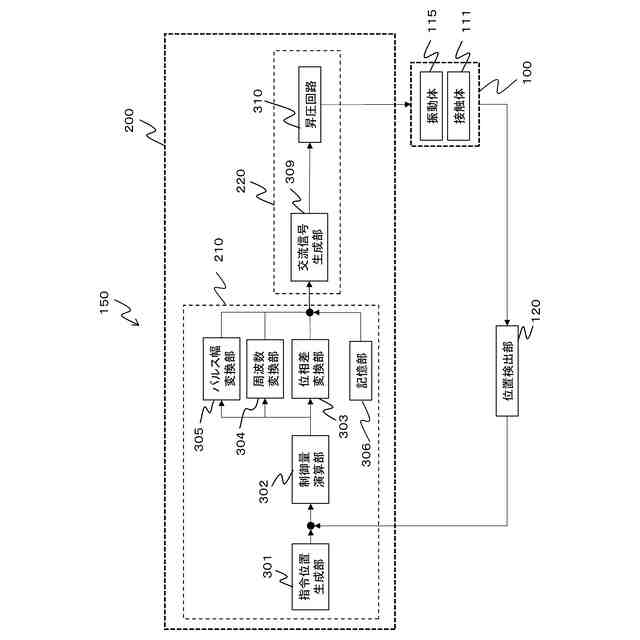
振動型駆動装置の構成例を示すブロック図である。
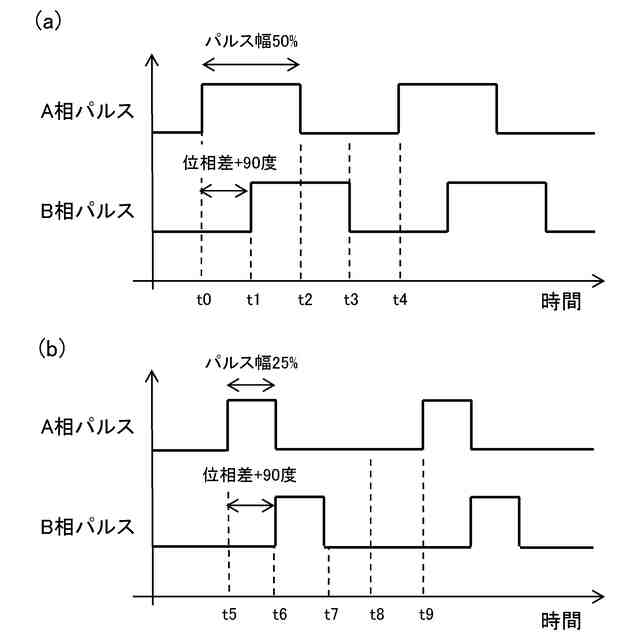
交流信号生成部から出力されるパルス信号のパルス幅の説明図である。
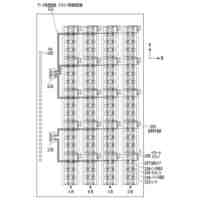
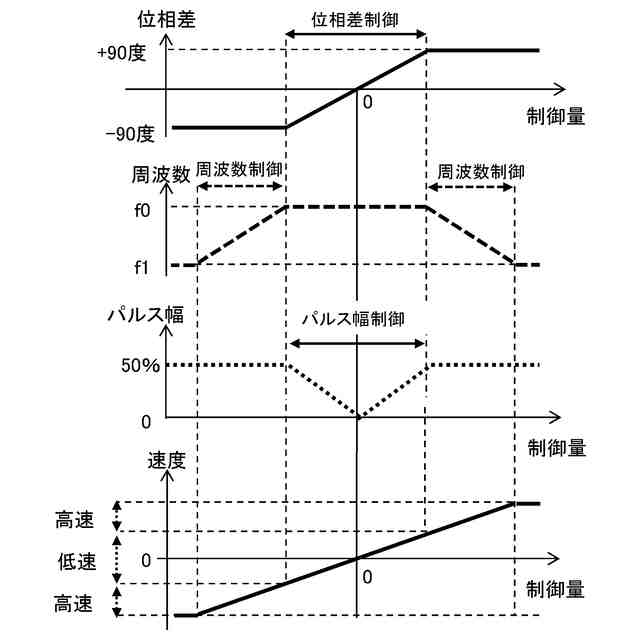
位相差とパルス幅と周波数と駆動速度との関係を説明する図である。
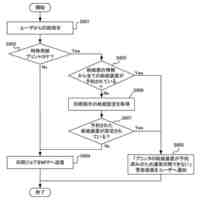
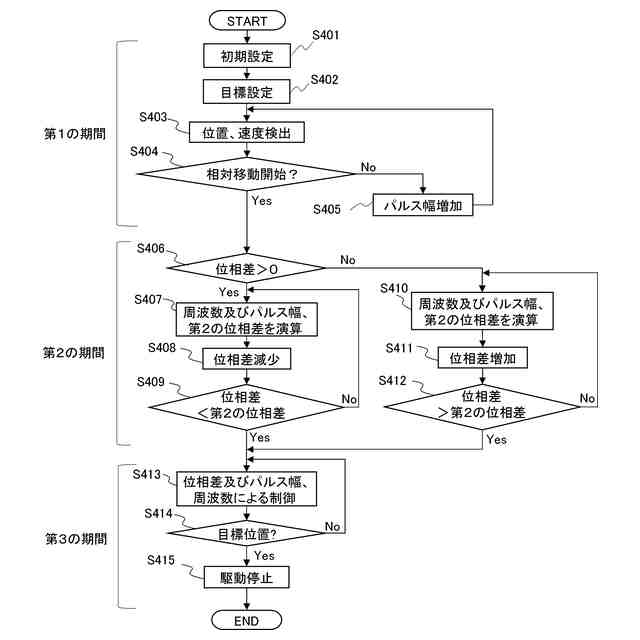
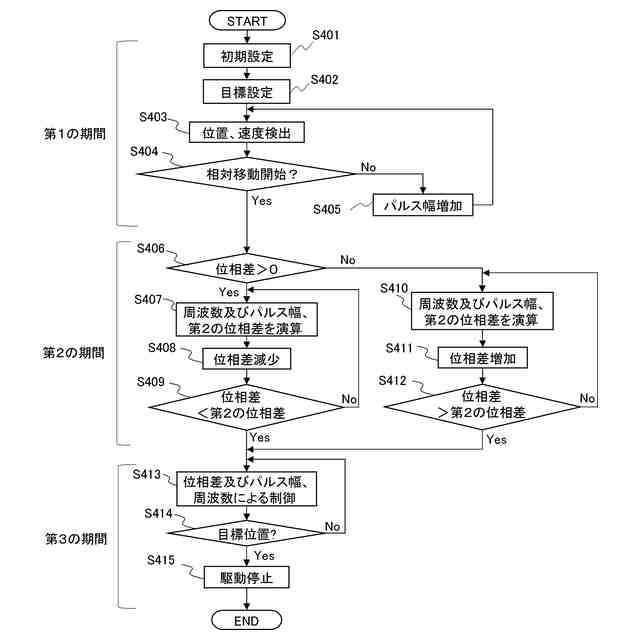
駆動方法のフローチャートである。
相対移動開始直後に駆動方向に対して動く方向の一例を示す図である。
位相差とパルス幅と振動型アクチュエータの位置の関係を示す図である。
駆動方法のフローチャートである。
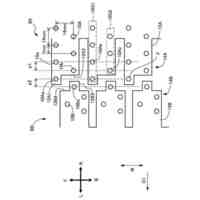
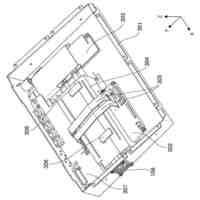
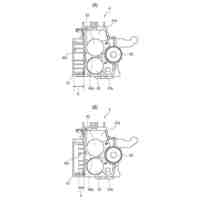
レンズ駆動機構部の構造例を示す斜視図である。
起動付近の時間と位置の関係を示す図である。
【発明を実施するための形態】
【0010】
以下、実施形態について、図面を参照して詳細に説明する。以下の説明において、「振動型駆動装置」は「振動型アクチュエータ」と「制御装置」とを含むものとし、「振動型アクチュエータ」は「振動体」と「接触体」とを含むものとし、「振動体」は「弾性体」と「電気-機械エネルギー変換素子」とを含むものとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
光学機器
26日前
キヤノン株式会社
測距装置
19日前
キヤノン株式会社
測距装置
26日前
キヤノン株式会社
送液装置
1か月前
キヤノン株式会社
撮像装置
25日前
キヤノン株式会社
記録装置
5日前
キヤノン株式会社
定着装置
27日前
キヤノン株式会社
記録装置
12日前
キヤノン株式会社
乾燥装置
13日前
キヤノン株式会社
印刷装置
19日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
通信装置
19日前
キヤノン株式会社
電子機器
19日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
乾燥装置
26日前
キヤノン株式会社
検出装置
12日前
キヤノン株式会社
定着装置
7日前
キヤノン株式会社
撮像装置
26日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
現像装置
19日前
キヤノン株式会社
防水構造体
12日前
キヤノン株式会社
露光ヘッド
5日前
キヤノン株式会社
光電変換装置
1か月前
キヤノン株式会社
情報処理装置
7日前
キヤノン株式会社
記録素子基板
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
情報処理装置
1か月前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像表示装置
7日前
キヤノン株式会社
画像形成装置
1か月前
キヤノン株式会社
振動波モータ
7日前
キヤノン株式会社
画像形成装置
1か月前
キヤノン株式会社
分析デバイス
6日前
キヤノン株式会社
画像記録方法
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ