TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024127331
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023036429
出願日
2023-03-09
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人武和国際特許事務所
主分類
E02F
9/26 20060101AFI20240912BHJP(水工;基礎;土砂の移送)
要約
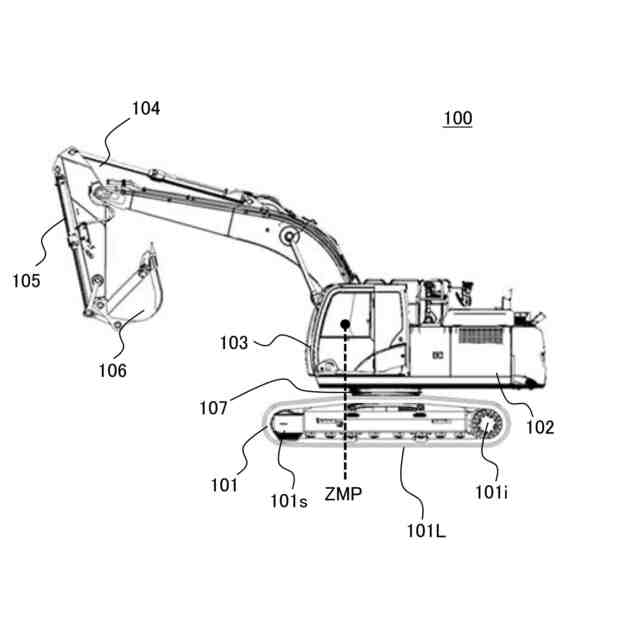
【課題】積載物の重量が変化する作業機械のZMPを精度よく算出する。
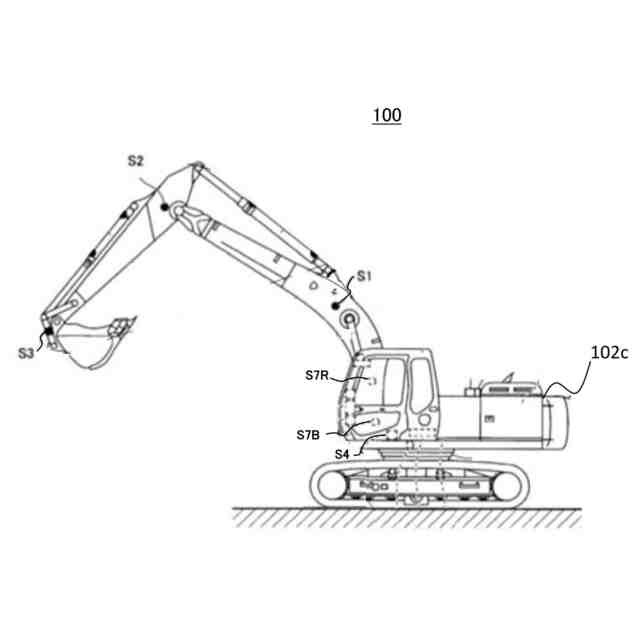
【解決手段】車体と、車体に取り付けられたフロント作業機(104,105,106)と、コントローラ(110)と、姿勢検出センサ(S1,S2,S3,S4)と、ディスプレイ(21)と、を備えた作業機械(100)において、フロント作業機の積載負荷を示す積載負荷パラメータを取得する積載負荷センサ(S7R、S7B)を更に備え、コントローラは、姿勢検出センサの検出結果及び積載負荷センサの検出結果により車体及びフロント作業機の動力学的な重心位置であるZMPを算出するZMP算出部(220)と、姿勢検出センサの検出結果により車体と地面との複数の接地点によって囲まれる支持多角形を算出する支持多角形算出部(230)とを含み、支持多角形にZMPを重畳してディスプレイに表示させる。
【選択図】図1
特許請求の範囲
【請求項1】
車体と、
前記車体に取り付けられたフロント作業機と、
前記車体および前記フロント作業機の姿勢を検出する姿勢検出センサと、
ディスプレイと、
コントローラと、を備えた作業機械において、
前記フロント作業機の積載負荷を示す積載負荷パラメータを取得する積載負荷センサを更に備え、
前記コントローラは、前記姿勢検出センサの検出結果及び前記積載負荷センサの検出結果により前記車体及び前記フロント作業機の動力学的な重心位置であるZMPを算出するZMP算出部と、
前記姿勢検出センサの検出結果により前記車体と地面との複数の接地点によって囲まれる支持多角形を算出する支持多角形算出部と、
前記支持多角形に前記ZMPを重畳して前記ディスプレイに表示させる表示制御部と、を備える、
ことを特徴とする作業機械。
続きを表示(約 3,000 文字)
【請求項2】
車体と、
前記車体に取り付けられたフロント作業機と、
車体およびフロント作業機の姿勢を検出する姿勢検出センサと、
ディスプレイと、
コントローラと、を備えた作業機械において、
前記フロント作業機の積載負荷を示す積載負荷パラメータを取得する積載負荷センサを更に備え、
前記コントローラは、前記姿勢検出センサの検出結果及び前記積載負荷センサの検出結果により前記車体及び前記フロント作業機の動力学的な重心位置であるZMPを算出するZMP算出部と、
前記姿勢検出センサの検出結果により前記車体と地面との複数の接地点によって囲まれる支持多角形を算出する支持多角形算出部と、
前記ZMPと前記支持多角形との比較結果に基づいて前記車体または前記フロント作業機の動作を制限する動作制御部と、を備える、
ことを特徴とする作業機械。
【請求項3】
請求項1に記載の作業機械において、
構成部品の仕様を判定するための部品情報を示す一次元コードまたは二次元コードが付加され、
前記車体には、前記一次元コードまたは二次元コードを読み取るカメラが更に備えられ、
前記コントローラは、前記カメラが読み取った撮像画像を解析する画像解析部を更に含み、
前記画像解析部が解析した前記構成部品の仕様も加味して、前記ZMP算出部は前記ZMPを算出する、
ことを特徴とする作業機械。
【請求項4】
請求項3に記載の作業機械において、
前記作業機械は油圧ショベルであって、
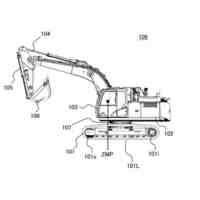
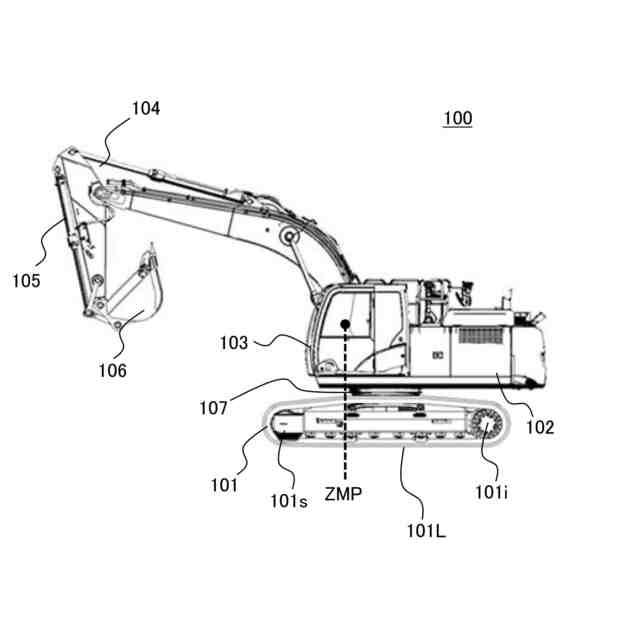
前記油圧ショベルは、下部走行体と、当該下部走行体の上に旋回機構を介して搭載された上部旋回体と、前記上部旋回体の前に俯仰可能に連結されたブームと、前記ブームの先端に回動可能に連結されたアームと、前記アームの先端に回転可能に取り付けられたバケットと、を備え、
前記上部旋回体は、前記油圧ショベルのオペレータが着座するキャブと、前記キャブの後方に備えられたカウンターウェイトと、を備え、
前記下部走行体は、左クローラ及び右クローラと、これら左クローラ及び右クローラを回転可能に指示するトラックと、を備え、
前記ブームにおける地面と対向する腹側面には当該ブームの部品情報を示すブーム二次元コードが備えられ、
前記アームにおける地面と対向する腹側面には当該アームの部品情報を示すアーム二次元コードが備えられ、
前記バケットにおける裏面には当該バケットの部品情報を示すバケット二次元コードが備えられ、
前記キャブの上面には、当該キャブの部品情報を示すキャブ二次元コードが備えられ、
前記トラックの上面には、当該下部走行体の部品情報を示す走行体二次元コードが備えられ、
前記カウンターウェイトの上面には、当該カウンターウェイトの部品情報を示すカウンターウェイト二次元コードが備えられ、
前記キャブの上面には、前方を画角に含む向きで取り付けられたキャブ前方カメラと、前記カウンターウェイトを画角に含む向きで取り付けられたキャブ後方カメラと、が備えられ、
前記アームの腹側にはアームカメラが備えられ、
前記キャブ前方カメラは、前記アーム二次元コード及び前記バケット二次元コードを読み取り、
前記キャブ後方カメラは、前記カウンターウェイト二次元コードを読み取り、
前記アームカメラは、前記ブーム二次元コード、前記キャブ二次元コード、及び前記走行体二次元コードを読み取る、
ことを特徴とする作業機械。
【請求項5】
請求項1に記載の作業機械において、
前記積載負荷センサは所定の周期で新たな前記積載負荷パラメータを検知し、
前記ZMP算出部は、前記積載負荷センサから新たな前記積載負荷パラメータを取得すると、前記所定の周期で前記ZMPを再度算出する、
ことを特徴とする作業機械。
【請求項6】
請求項2に記載の作業機械において、
構成部品の仕様を判定するための部品情報を示す一次元コードまたは二次元コードが付加され、
前記車体には、前記一次元コードまたは二次元コードを読み取るカメラが更に備えられ、
前記コントローラは、前記カメラが読み取った撮像画像を解析する画像解析部を更に含み、
前記画像解析部が解析した前記構成部品の仕様も加味して、前記ZMP算出部は前記ZMPを算出する、
ことを特徴とする作業機械。
【請求項7】
請求項6に記載の作業機械において、
前記作業機械は油圧ショベルであって、
前記油圧ショベルは、下部走行体と、当該下部走行体の上に旋回機構を介して搭載された上部旋回体と、前記上部旋回体の前に俯仰可能に連結されたブームと、前記ブームの先端に回動可能に連結されたアームと、前記アームの先端に回転可能に取り付けられたバケットと、を備え、
前記上部旋回体は、前記油圧ショベルのオペレータが着座するキャブと、前記キャブの後方に備えられたカウンターウェイトと、を備え、
前記下部走行体は、左クローラ及び右クローラと、これら左クローラ及び右クローラを回転可能に指示するトラックと、を備え、
前記ブームにおける地面と対向する腹側面には当該ブームの部品情報を示すブーム二次元コードが備えられ、
前記アームにおける地面と対向する腹側面には当該アームの部品情報を示すアーム二次元コードが備えられ、
前記バケットにおける裏面には当該バケットの部品情報を示すバケット二次元コードが備えられ、
前記キャブの上面には、当該キャブの部品情報を示すキャブ二次元コードが備えられ、
前記トラックの上面には、当該下部走行体の部品情報を示す走行体二次元コードが備えられ、
前記カウンターウェイトの上面には、当該カウンターウェイトの部品情報を示すカウンターウェイト二次元コードが備えられ、
前記キャブの上面には、前方を画角に含む向きで取り付けられたキャブ前方カメラと、前記カウンターウェイトを画角に含む向きで取り付けられたキャブ後方カメラと、が備えられ、
前記アームの腹側にはアームカメラが備えられ、
前記キャブ前方カメラは、前記アーム二次元コード及び前記バケット二次元コードを読み取り、
前記キャブ後方カメラは、前記カウンターウェイト二次元コードを読み取り、
前記アームカメラは、前記ブーム二次元コード、前記キャブ二次元コード、及び前記走行体二次元コードを読み取る、
ことを特徴とする作業機械。
【請求項8】
請求項2に記載の作業機械において、
前記積載負荷センサは所定の周期で新たな前記積載負荷パラメータを検知し、
前記ZMP算出部は、前記積載負荷センサから新たな前記積載負荷パラメータを取得すると、前記所定の周期で前記ZMPを再度算出する、
ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
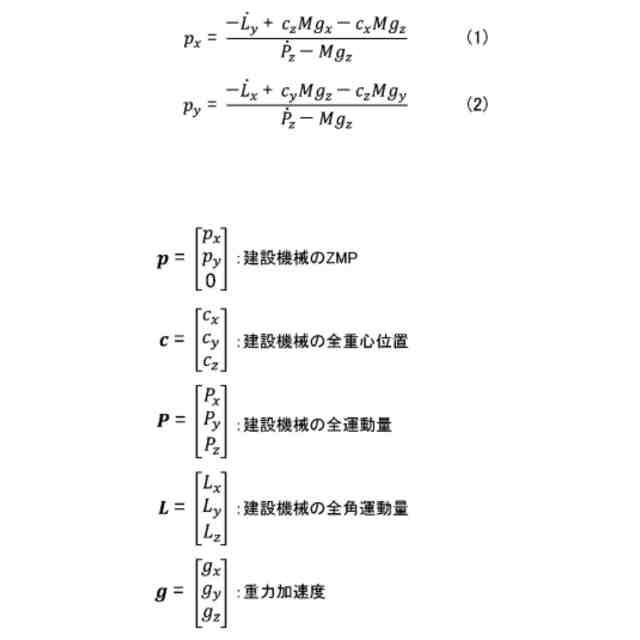
本発明は作業機械に係り、特に動力学的な重心位置であるゼロモーメントポジション(ZMP)の算出に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1には、「関節角θ、角速度θ’、角加速度θ”、及び傾斜角βに基づいて、建設機械のZMPを算出する。探索部は、現在のZMPが安全領域D2の外側に位置する場合、安全領域D2の境界B2及び任意のZMP間の距離Lpを角加速度θ”で示す第1関数F1において、現在の角加速度に対して距離Lpが減少する割合が最大となる傾斜方向を探索し、探索した傾斜方向に沿って角加速度を変化させることにより、距離Lpが零以下になる角加速度を探索する。(要約抜粋)」転倒防止装置が開示されている。
【0003】
また、特許文献2には、「部品判別装置において、カメラを用いて部品を撮像した撮像データを入力する画像入力部と、この撮像データを、部品の少なくとも1つの特徴部位をそれぞれ含むように第1撮像データと第2撮像データとに分割する分割部と、第1撮像データを用いて第1撮像データ内の特徴部位の仕様を特定し、それによって部品の種類を特定する仕様特定部と、第2撮像データを用いて、第2撮像データ内の特徴部位の仕様が、仕様特定部で特定された種類の仕様と同一か否かの正誤判定を行う仕様正誤判定部と、を備える。(要約抜粋)」部品判別装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2018-21416号公報
特開2020-149578号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ショベルやホイールローダ、クレーンなどの作業機械では、積載物の重量によってZMPは変化しうる。しかし、特許文献1では、積載物による負荷はZMPの算出に際して考慮されておらず、正確なZMPが算出できていないという課題がある。また特許文献2では部品の判別は可能であるがZMPについて考慮はされていない。このように、ZMPが必ずしも正確に算出されないので、オペレータは表示されたZMPの位置を完全に信用することができない。
【0006】
本発明の目的は、積載物の重量が変化したとしても精度のよい作業機械のZMPをオペレータに示すことにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明は、車体と、前記車体に取り付けられたフロント作業機と、前記車体および前記フロント作業機の姿勢を検出する姿勢検出センサと、ディスプレイと、コントローラと、を備えた作業機械において、前記フロント作業機の積載負荷を示す積載負荷パラメータを取得する積載負荷センサを更に備え、前記コントローラは、前記姿勢検出センサの検出結果及び前記積載負荷センサの検出結果により前記車体及び前記フロント作業機の動力学的な重心位置であるZMPを算出するZMP算出部と、前記姿勢検出センサの検出結果により前記車体と地面との複数の接地点によって囲まれる支持多角形を算出する支持多角形算出部と、前記支持多角形に前記ZMPを重畳して前記ディスプレイに表示させる表示制御部と、を備える、ことを特徴とする。
【発明の効果】
【0008】
本発明によれば、積載物の重量が変化したとしても精度のよい作業機械のZMPをオペレータに示すことができる。上記した以外の目的、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
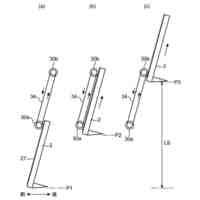
油圧ショベルの構成を示す左側面図である。
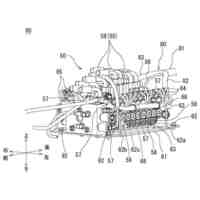
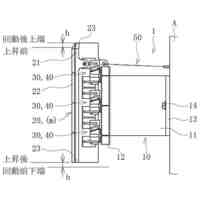
第1実施形態における油圧ショベルにおけるZMPの算出に必要なパラメータを検知するセンサの取付位置を示す図である。
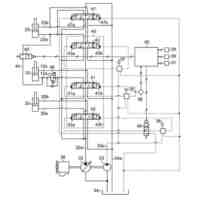
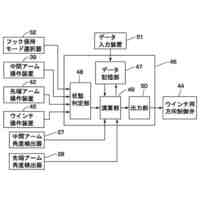
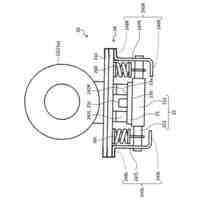
第1実施形態に係る油圧ショベルのハードウェア構成を示すブロック図である。
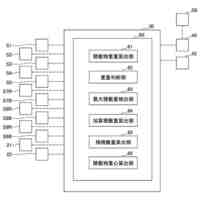
第1実施形態に係る油圧ショベルに搭載されるコントローラの機能ブロック図である。
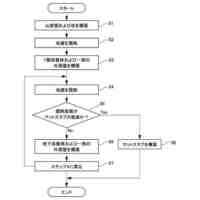
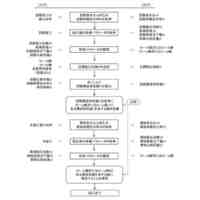
第1実施形態に係る油圧ショベルでのZMP算出処理の流れを示すフローチャートである。
画面表示例を示す図であって、(a)は下部走行体が地表面に成立している状態の支持多角形の一例にZMPを重畳した図、(b)は下部走行体がフロント作業機によってジャッキアップされた状態での支持多角形の一例にZMPを重畳した図である。
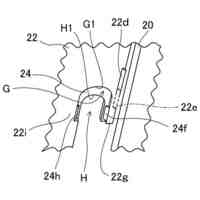
アーム、バケットの二次元コード取付位置を示す図であり、(a)は油圧ショベルの後方からアーム及びバケットを見た状態を示す図、(b)は、アームの腹側面及びバケットの裏面を拡大した図である。
バケット、キャブ、トラックの二次元コード取付位置を示す図であり、(a)は油圧ショベルを前方から状態を示す図、(b)は、ブームの腹側面、キャブ上面、及びトラック上面を拡大した図である。
カウンターウェイト二次元コード取付位置を示す図であり、(a)は上部旋回体の上面図、(b)は、カウンターウェイト二次元コード取付位置の拡大図である。
第2実施形態における油圧ショベルにおけるZMPの算出に必要なパラメータを検知するセンサ及び部品情報を読み取るカメラの取付位置を示す図である。
第2実施形態に係る油圧ショベルのハードウェア構成を示すブロック図である。
第2実施形態に係る油圧ショベルに搭載されるコントローラの機能ブロック図である。
第2実施形態に係る油圧ショベルでのZMP算出処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態を図面に基づいて詳細に説明する。なお、実施形態を説明するための全図において、同一の機能を有する部材には同一又は関連する符号を付し、その繰り返しの説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
接続構造
1日前
株式会社パルパルス
環境保全資材
22日前
日本車輌製造株式会社
杭打機
12日前
株式会社トラバース
拡底型の鋼管杭
16日前
日立建機株式会社
深礎掘削機
19日前
住友重機械工業株式会社
作業機械
1日前
大成建設株式会社
地下構造物の構築方法
1日前
SUS株式会社
ユニットハウス用基礎
19日前
株式会社丸島アクアシステム
除塵装置
16日前
株式会社大林組
複合地盤検討方法
8日前
大和ハウス工業株式会社
スラブ構築方法
15日前
株式会社不動テトラ
地盤改良方法
9日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
建設機械
17日前
コベルコ建機株式会社
作業機械の溶接構造
8日前
日本建設技術株式会社
盛土造成構造
22日前
日立建機株式会社
建設機械
16日前
有限会社キシムラ
防砂シート敷設構造
16日前
太平洋セメント株式会社
地盤改良方法
9日前
ヤンマーホールディングス株式会社
建設機械
2日前
青木あすなろ建設株式会社
土構造物の品質管理方法
2日前
青木あすなろ建設株式会社
土構造物の品質管理方法
2日前
日本ソリッド株式会社
新規なタイヤ衝撃吸収材の装着方法
22日前
太平洋セメント株式会社
地盤改良方法
9日前
ヤンマーホールディングス株式会社
建設機械
1日前
株式会社日立建機ティエラ
電動式建設機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
22日前
日立建機株式会社
作業機械
1日前
学校法人常翔学園
水位検出システム及び水位検出方法
19日前
株式会社大林組
建替え工法
15日前
コベルコ建機株式会社
建設機械の旋回フレーム
19日前
西武ポリマ化成株式会社
受衝板を備える防舷装置
2日前
ヤンマーホールディングス株式会社
作業機械
9日前
ヤンマーホールディングス株式会社
作業機械
22日前
ジェコス株式会社
飛散防止装置
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ