TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024127611
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023036875
出願日
2023-03-09
発明の名称
作業機械
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/26 20060101AFI20240912BHJP(水工;基礎;土砂の移送)
要約
【課題】積載物の重量の算出の精度を向上させる。
【解決手段】作業機械は、下部走行体と、下部走行体に旋回自在の搭載される上部旋回体と、上部旋回体に取り付けられるアタッチメントと、アタッチメントの先端に設けられる作業具と、を有し、作業具によって積載物が搬送されている間に、当該積載物の重量を異なる位置で2回計測し、2回計測された重量の差が所定値以上の場合には、当該積載物の落下に対応する所定の制御を行う。
【選択図】図5
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体に旋回自在の搭載される上部旋回体と、
前記上部旋回体に取り付けられるアタッチメントと、
前記アタッチメントの先端に設けられる作業具と、を有し、
前記作業具によって積載物が搬送されている間に、当該積載物の重量を異なる位置で2回計測し、2回計測された重量の差が所定値以上の場合には、当該積載物の落下に対応する所定の制御を行う、
作業機械。
続きを表示(約 970 文字)
【請求項2】
前記所定の制御として、前記2回計測された重量のうち後の方を計測値として採用する、
請求項1に記載の作業機械。
【請求項3】
前記積載物の重量を異なる位置で前記2回計測し、前記2回計測された重量の差が前記所定値より小さい場合には、前記2回計測された重量のうち前の方を計測値として採用する、
請求項2に記載の作業機械。
【請求項4】
前記計測値が採用された後、前記作業具の動作に基づいて、採用された前記計測値を確定する、
請求項2に記載の作業機械。
【請求項5】
前記2回計測として、前記アタッチメントに含まれるブームの上げ動作を行っている間に、前記積載物の重量について第1の計測を行い、前記ブームの上げ動作の後であり且つ前記上部旋回体の旋回動作が開始した後に、前記積載物の重量について第2の計測を行う、
請求項1に記載の作業機械。
【請求項6】
前記2回計測として、前記積載物の重量について第1の計測を行い、前記第1の計測の後に前記アタッチメントに含まれるブームの上げ動作を行い、前記上げ動作の後に前記積載物の重量について第2の計測を行う、
請求項1に記載の作業機械。
【請求項7】
前記2回計測された重量のうち後の方を計測値として採用する際に、前記作業機械の操作者に、前記作業具から前記積載物の一部が落ちたことを示す情報を出力する、
請求項1に記載の作業機械。
【請求項8】
前記作業具は、前記積載物を吸着可能なリフティングマグネットであり、
前記リフティングマグネットに吸着している前記積載物が搬送されている間に、2回計測された重量の差が前記所定値以上の場合には、前記所定の制御として、前記リフティングマグネットから離れた前記積載物を再吸着させる制御を行う、
請求項1に記載の作業機械。
【請求項9】
前記リフティングマグネットから離れた前記積載物に対する再吸着を行う際に、2回計測された重量の差が前記所定値以上となる前と比べて、前記リフティングマグネットで生じている磁力を強くする制御を行う、
請求項8に記載の作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来から、アタッチメントの先端に設けられた作業具に積載物を保持し、且つ当該アタッチメントを用いて積載物を持ち上げて、当該積載物がダンプトラックの荷台の上に来るように旋回動作を行った後、ダンプトラックの荷台等に積み込む作業機械が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/060109号
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年、作業機械に積載物の重量を検出する機能が設けられている。当該機能で積載物の重量を検出した場合、作業機械が土砂や金属スクラップなどの積載物を搬送している間に、ダンプやトレーラ等への搬送中に積載物の一部をこぼすと積載物の重量の検出誤差になる。
【0005】
本発明の一態様は、作業具から積載物の一部をこぼれる可能性を考慮することで、搬送する積載物の重量の算出精度を向上させる技術を提供する。
【課題を解決するための手段】
【0006】
本発明の一態様に係る作業機械は、下部走行体と、下部走行体に旋回自在の搭載される上部旋回体と、上部旋回体に取り付けられるアタッチメントと、アタッチメントの先端に設けられる作業具と、を有し、作業具によって積載物が搬送されている間に、当該積載物の重量を異なる位置で2回計測し、2回計測された重量の差が所定値以上の場合には、当該積載物の落下に対応する所定の制御を行う。
【発明の効果】
【0007】
本発明の一態様によれば、積載物の重量の算出の精度を向上させる。
【図面の簡単な説明】
【0008】
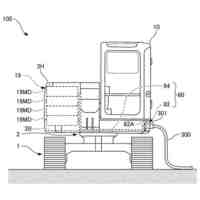
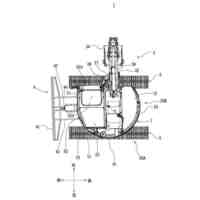
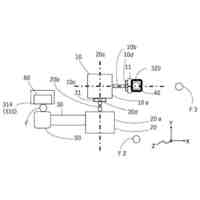
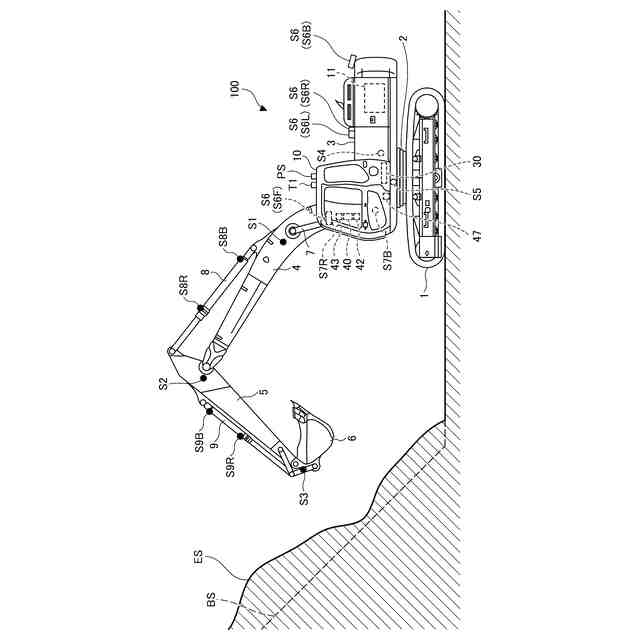
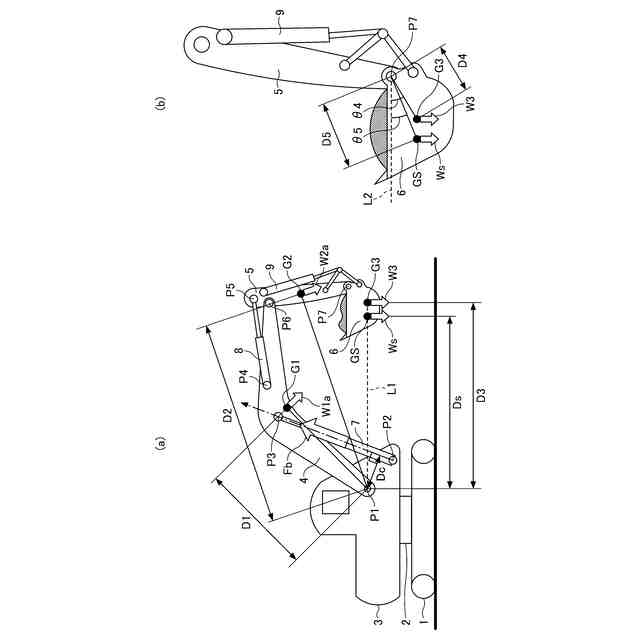
図1は、第1の実施形態に係るショベルの側面図である。
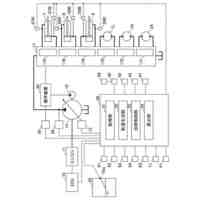
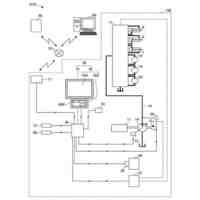
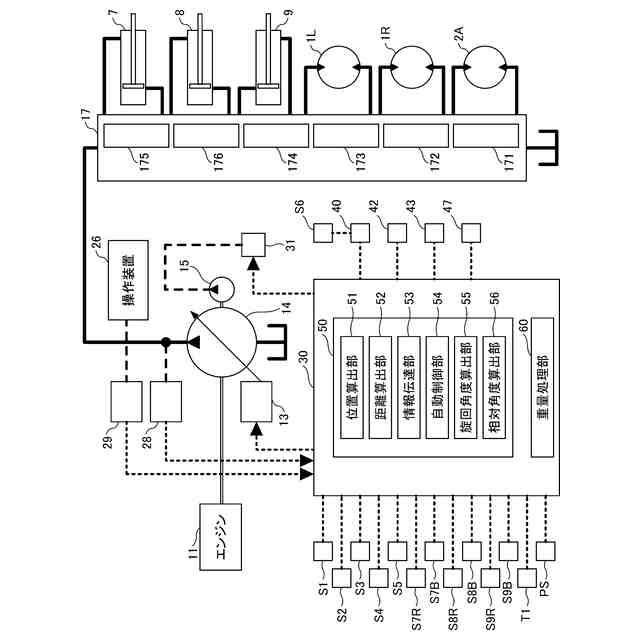
図2は、第1の実施形態に係るショベルの構成の一例を概略的に示す図である。
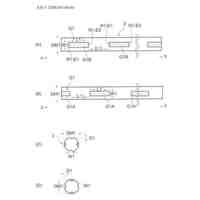
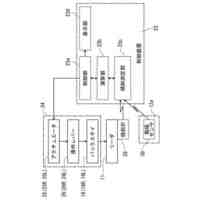
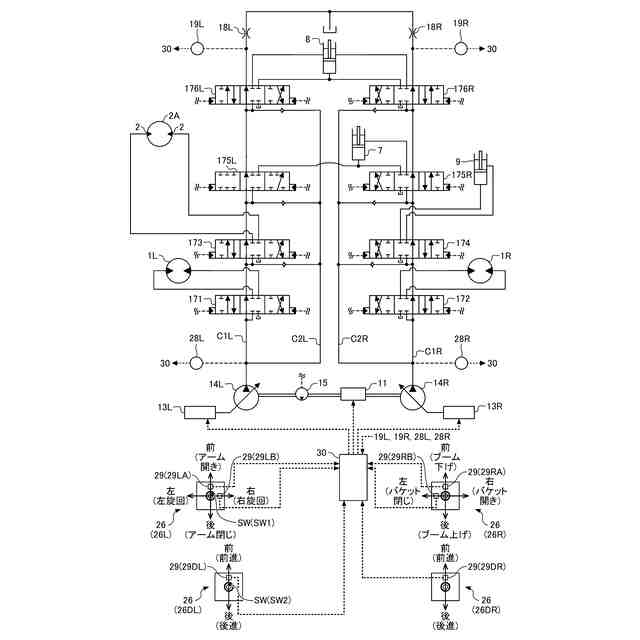
図3は、第1の実施形態に係るショベルの油圧システムの構成の一例を概略的に示す図である。
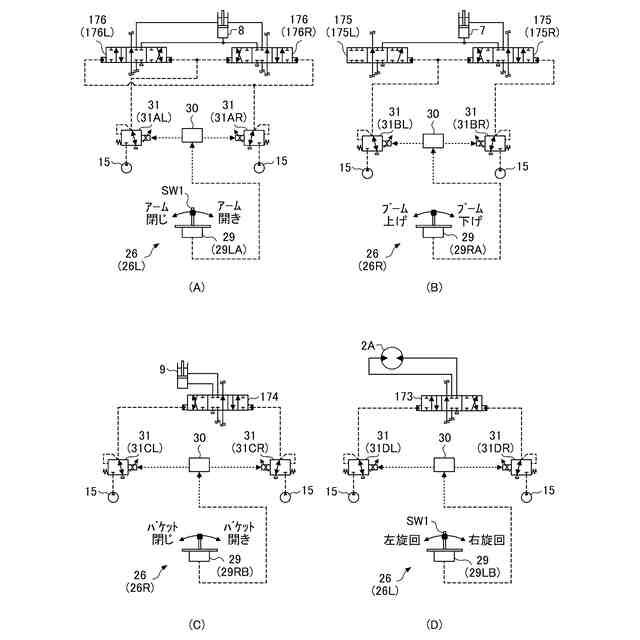
図4は、第1の実施形態に係るショベルの油圧システムの一部を抜き出した図である。
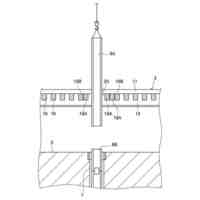
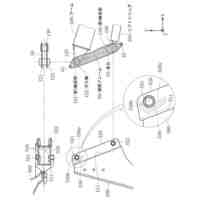
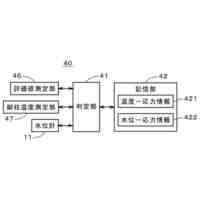
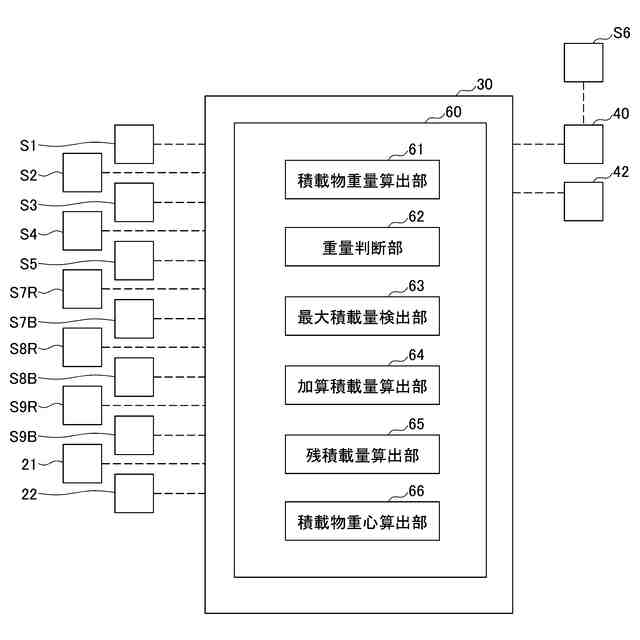
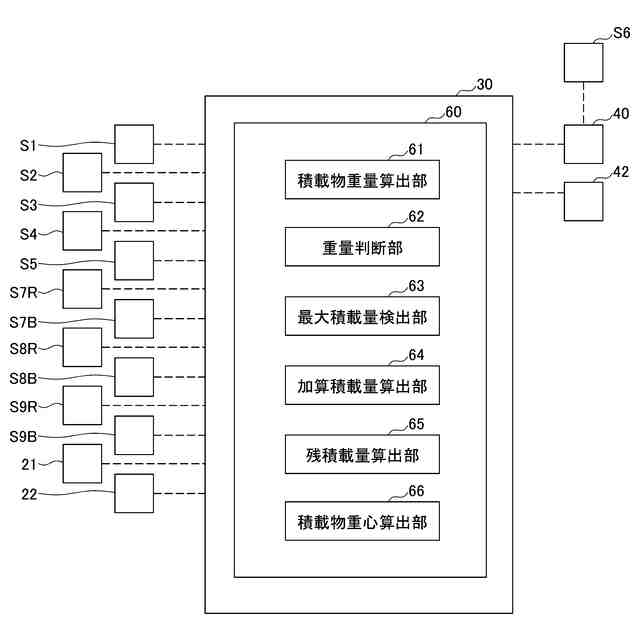
図5は、第1の実施形態に係るショベルのうちの重量検出機能に関する構成部分の一例を概略的に示す図である。
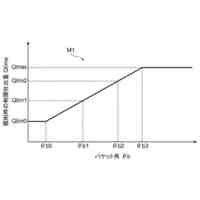
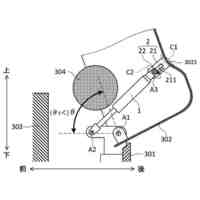
図6は、第1の実施形態に係るショベルのアタッチメントにおける積載物の重量の算出に関するパラメータを説明する模式図である。
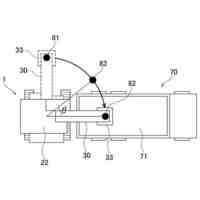
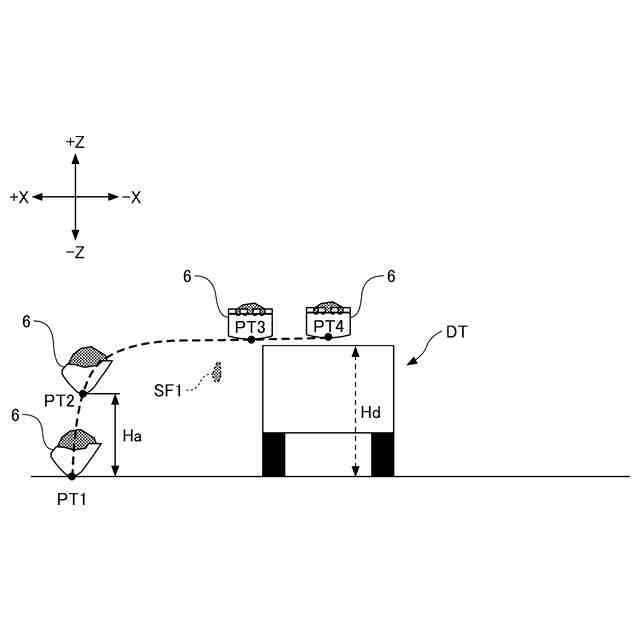
図7は、第1の実施形態に係るショベルにおける、ダンプトラックに積載物を積み込むまでのバケットの移動軌跡を示した図である。
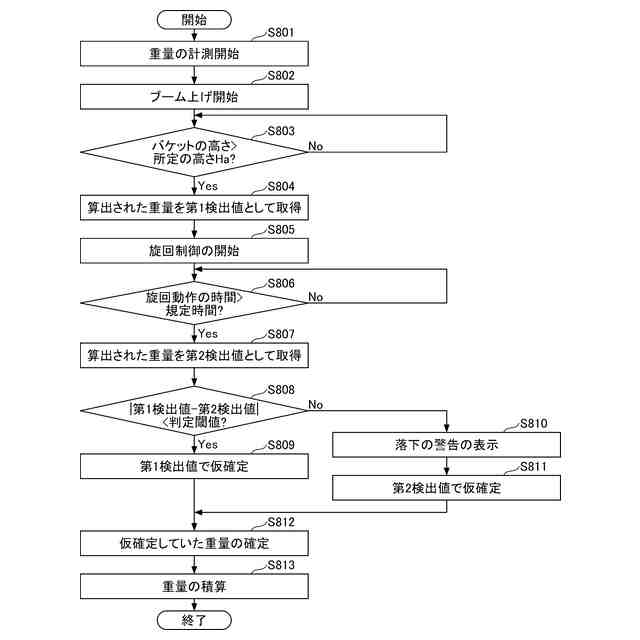
図8は、第1の実施形態に係るショベルによる積載物をダンプトラックに積み込むまでの処理手順を示したフローチャートである。
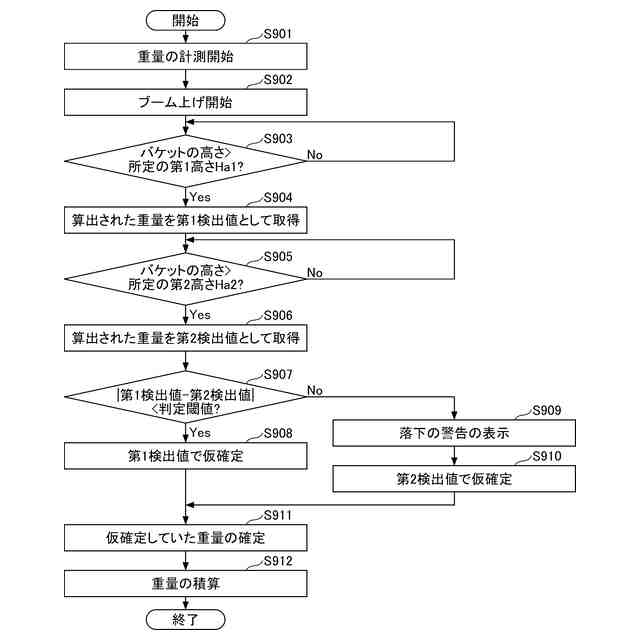
図9は、第2の実施形態に係るショベルによる積載物をダンプトラックに積み込むまでの処理手順を示したフローチャートである。
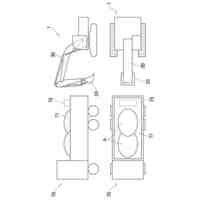
図10は、第3の実施形態に係る作業機械の側面図である。
図11は、第3の実施形態に係る作業機械による積載物をダンプトラックに積み込むまでの処理手順を示したフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照して説明する。また、以下で説明する実施形態は、発明を限定するものではなく例示であって、実施形態に記述される全ての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。なお、各図面において同一の又は対応する構成には同一の又は対応する符号を付し、説明を省略することがある。
【0010】
(作業機械の概要)
本実施形態では、作業機械の一例としてショベルを用いる例について説明するが、ショベルに制限するものではない。建設機械、標準機、応用器、林業機械、又は油圧ショベルをベースとした搬送機械に適用してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
エア津波緩衝装置
20日前
個人
指示装置
19日前
株式会社不二越
建設機械
26日前
株式会社クボタケミックス
桝蓋
19日前
住友建機株式会社
ショベル
26日前
住友建機株式会社
ショベル
13日前
コベルコ建機株式会社
作業機械
20日前
個人
鋼管杭とその製造方法
19日前
住友重機械工業株式会社
作業機械
19日前
鹿島建設株式会社
建込み方法
5日前
株式会社フジタ
建築物とその施工方法
26日前
コベルコ建機株式会社
作業機械
19日前
コベルコ建機株式会社
作業機械
19日前
千代田工営株式会社
杭と上部構造物との接合構造
26日前
個人
アンカーボルト支持装置
14日前
ヤンマーホールディングス株式会社
作業機械
19日前
住友重機械工業株式会社
作業機械の制御装置
19日前
スーパーレジンクラフト株式会社
防塵板付消波装置
13日前
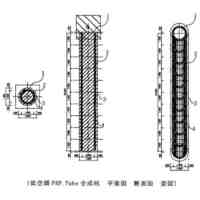
ジーネットワーク株式会社
低空頭FRP.Tube合成杭
14日前
日立建機株式会社
作業車両
7日前
三陽機器株式会社
作業機の作業部連結構造
7日前
株式会社竹中工務店
山留め工法
19日前
株式会社竹中工務店
山留め工法
19日前
日特建設株式会社
基盤材処理システム
20日前
清水建設株式会社
道路に対する液状化対策構造
26日前
ニシオホールディングス株式会社
作業機械用操作装置
19日前
住友重機械工業株式会社
作業機械及び作業支援システム
19日前
ジャパンパイル株式会社
回転埋設杭
14日前
小岩金網株式会社
布団篭の本体パネル及び布団篭
18日前
株式会社竹内製作所
作業用車両
7日前
カナデビア株式会社
異常検出装置および異常検出方法
12日前
東京電力ホールディングス株式会社
水中沈殿物回収ロボット
25日前
あおみ建設株式会社
三点式杭打ち機のリーダ鉛直自動補正システム
13日前
ヤンマーホールディングス株式会社
作業機械
12日前
株式会社東芝
蓋の開閉装置
14日前
スエヒロシステム株式会社
ねじ式平ライナー及びその取付工具
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ