TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024132733
公報種別
公開特許公報(A)
公開日
2024-10-01
出願番号
2023043631
出願日
2023-03-17
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/22 20060101AFI20240920BHJP(水工;基礎;土砂の移送)
要約
【課題】作動環境の変化や油圧構成要素の性能ばらつきおよび性能劣化を含む油圧駆動システムの稼働状態の変動に関わらず、操作入力に対する油圧駆動システムの制御対象要素の制御量の関係を一定に保つことが可能な制御ロバスト性の高い作業機械を提供する。
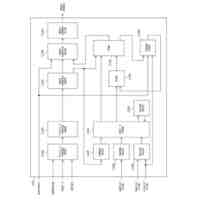
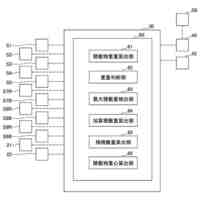
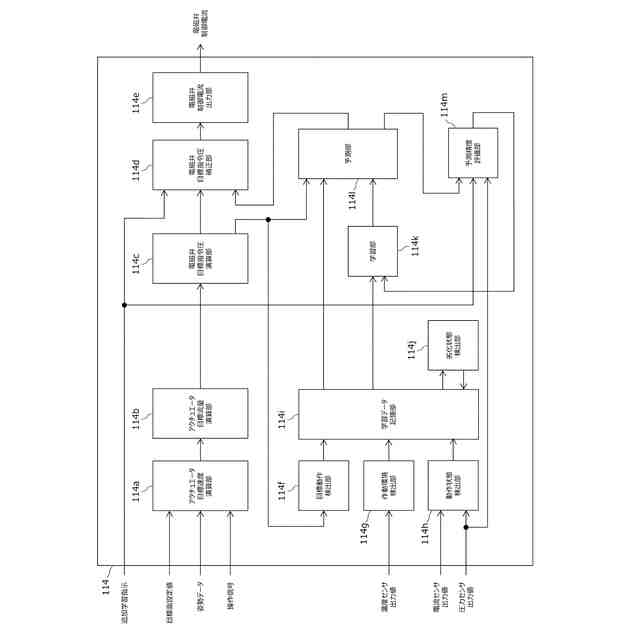
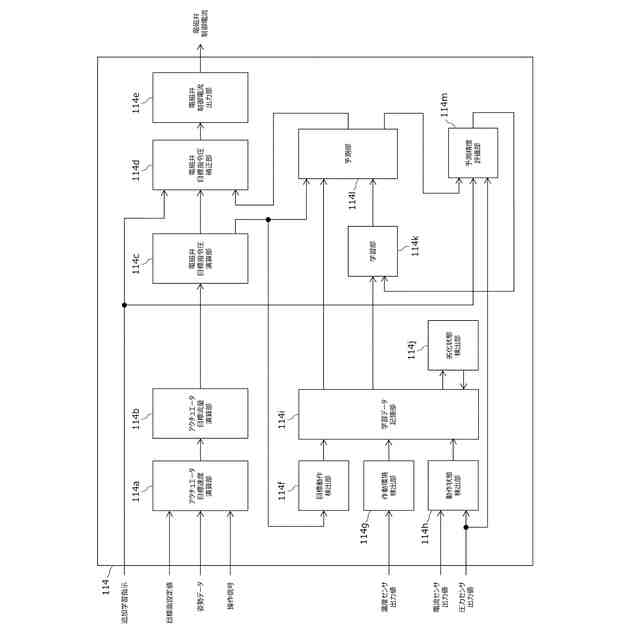
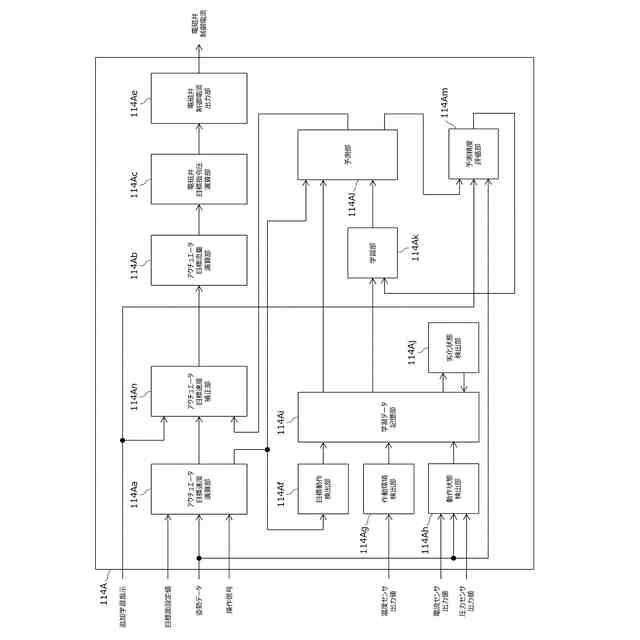
【解決手段】制御装置114は、制御対象要素113a~113eの目標制御量と油圧駆動システム902の稼働状態とを学習データとして記憶する学習データ記憶部114iと、学習データ記憶部114iに記憶された前記学習データをもとに、前記目標制御量に対する制御対象要素113a~113eの制御量を機械学習する学習部114kと、学習部114kにおける前記機械学習の学習結果を用いて、前記目標制御量に対する前記制御量の予測値である予測制御量を算出する予測部114lと、前記予測制御量が前記目標制御量に近づくように前記制御信号を補正する制御信号補正部114dとを有する。
【選択図】 図4
特許請求の範囲
【請求項1】
車体と、
前記車体に取り付けられた作業装置と、
前記作業装置を駆動する油圧アクチュエータと、
前記油圧アクチュエータを駆動する油圧駆動システムと、
前記油圧アクチュエータの動作を指示する操作装置と、
前記操作装置の操作量に応じた前記油圧駆動システムへの制御信号を出力する制御装置とを備えた作業機械において、
前記制御装置は、
前記操作装置の操作量をもとに前記油圧駆動システムの制御対象要素の目標制御量を算出する目標制御量演算部と、
前記油圧駆動システムの稼働状態を検出する稼働状態検出部と、
前記目標制御量と前記稼働状態検出部の検出結果とを学習データとして記憶する学習データ記憶部と、
前記学習データ記憶部に記憶された前記学習データをもとに、前記目標制御量に対する前記制御対象要素の制御量を機械学習する学習部と、
前記学習部における前記機械学習の学習結果を用いて、前記目標制御量に対する前記制御量の予測値である予測制御量を算出する予測部と、
前記予測制御量が前記目標制御量に近づくように前記制御信号を補正する制御信号補正部とを有する
ことを特徴とする作業機械。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の作業機械において、
前記稼働状態検出部は、
前記油圧駆動システムの動作状態を検出する動作状態検出部と、
前記油圧駆動システムの作動環境を検出する作動環境検出部と、
前記油圧駆動システムの劣化状態を検出する劣化状態検出部とを有する
ことを特徴とする作業機械。
【請求項3】
請求項2に記載の作業機械において、
前記車体、前記作業装置、または前記油圧アクチュエータの動作を検出する動作検出装置を備え、
前記動作状態検出部は、前記動作検出装置の検出結果をもとに前記油圧駆動システムの動作状態を検出する
ことを特徴とする作業機械。
【請求項4】
請求項2に記載の作業機械において、
前記油圧駆動システム内を循環する作動油の圧力を検出する圧力センサを備え、
前記動作状態検出部は、前記圧力センサの検出結果をもとに前記油圧駆動システムの動作状態を検出する
ことを特徴とする作業機械。
【請求項5】
請求項2に記載の作業機械において、
前記制御装置から前記油圧駆動システムへ出力される電気制御信号の電流または電圧を検出する電気信号検出装置を備え、
前記動作状態検出部は、前記電気信号検出装置の検出結果をもとに前記油圧駆動システムの動作状態を検出する
ことを特徴とする作業機械。
【請求項6】
請求項2に記載の作業機械において、
前記油圧駆動システム内を循環する作動油または冷却水の温度、あるいは外気温を検出する温度センサを備え、
前記作動環境検出部は、前記温度センサの検出結果をもとに前記油圧駆動システムの作動環境を検出する
ことを特徴とする作業機械。
【請求項7】
請求項2に記載の作業機械において、
前記劣化状態検出部は、前記目標制御量、前記動作状態検出部および前記作動環境検出部の検出結果をもとに前記油圧駆動システムの劣化状態を検出する
ことを特徴とする作業機械。
【請求項8】
請求項2に記載の作業機械において、
前記油圧駆動システムの劣化に関わる情報である劣化関連情報を前記制御装置へ入力する劣化関連情報入力装置を備え、
前記劣化状態検出部は、前記目標制御量、前記動作状態検出部および前記作動環境検出部の検出結果、ならびに前記劣化関連情報をもとに前記油圧駆動システムの劣化状態を検出する
ことを特徴とする作業機械。
【請求項9】
請求項1に記載の作業機械において、
前記制御対象要素の制御量を計測する制御量計測装置を備え、
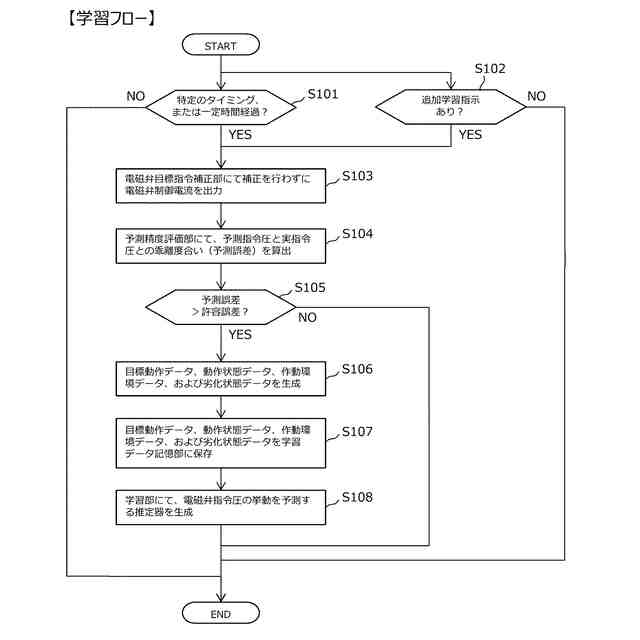
前記制御装置は、前記制御信号補正部が前記制御信号を補正しない状態での前記制御量の計測値と前記予測制御量との乖離度合いである予測誤差が所定の許容誤差を超えているか否かを判定する予測精度評価部を備え、
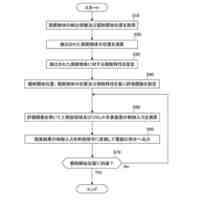
前記学習部は、前記予測精度評価部により前記予測誤差が前記許容誤差を超えていると判定された場合に、前記機械学習を実行する
ことを特徴とする作業機械。
【請求項10】
請求項9に記載の作業機械において、
前記機械学習の実行を指示する指示装置を備え、
前記予測精度評価部は、前記指示装置からの指示を受けて、前記予測誤差が所定の許容誤差を超えているか否かを判定する
ことを特徴とする作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、油圧ショベル等の作業機械に関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
一般的に油圧を動力とする作業機械の油圧システムは、複数の油圧ポンプと、複数の油圧アクチュエータと、当該複数の油圧ポンプから当該複数の油圧アクチュエータに供給する作動油を制御するための複数の流量制御弁とから構成されている。この油圧構成要素は機械的に直接制御されることが一般的である。例えば、操作レバーの動きが油圧バルブの動作に機械的に作用し、これにより生成される油圧指令によりポンプやバルブの油圧構成要素の動作量が決定される。また、近年は、油圧構成要素の機械的な制御の代わりに電気信号を用いて油圧構成要素を制御する電子制御油圧システムが開発された。
【0003】
電子制御油圧システムでは、入力指令を電流又は油圧構成要素の動作を駆動する信号に変換することができ、油圧構成要素の動作をコントローラによって制御することで様々な操作形態での操作や多様な機能の実装が容易である。その一方で、電子制御油圧システムでは、操作指示入力から油圧構成要素を駆動するまでの間に介在する構成要素が多く、また、それら構成要素が含む性能のばらつきや非線形特性によって生じる誤差の積み重ねにより、作業機械や油圧構成要素へ所望する動作と実際の動作との乖離が大きくなりやすいことが課題である。
【0004】
この課題を解決するための先行技術を開示する文献として、例えば特許文献1がある。特許文献1によれば、トレーニングデータセットに基づく機械学習システムを利用して、油圧構成要素の目標速度を指示する入力コマンドと機械状態データの組合せを、入力コマンドに応答して油圧構成要素の動きを引き起こす油圧バルブの予測変位にマッピングした予測変位マップを生成し、この予測変位マップを用いてバルブ電流を決定することにより、油圧構成要素を目標速度で動かすことができる。
【先行技術文献】
【特許文献】
【0005】
特表2022―532740号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の機械制御システムでは、特定の機械動作の実行中に測定したパラメータをもとにトレーニングデータが構築されるため、機械制御システムで発生し得る作動環境の変化などの外乱要素および油圧構成要素の性能ばらつきなどの内乱要素の全てをトレーニングデータセットで網羅することは非常に困難である。そのため、トレーニングデータセットで網羅しきれていない外乱要素や内乱要素の発生有無に応じて、操作入力に対する油圧駆動システムの制御対象要素の制御量が変動する可能性がある。
【0007】
本発明は、上記の課題に鑑みてなされたものであり、その目的は、作動環境の変化や油圧構成要素の性能ばらつきおよび性能劣化を含む油圧駆動システムの稼働状態の変動に関わらず、操作入力に対する油圧駆動システムの制御対象要素の制御量の関係を一定に保つことが可能な制御ロバスト性の高い作業機械を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は、車体と、前記車体に取り付けられた作業装置と、前記作業装置を駆動する油圧アクチュエータと、前記油圧アクチュエータを駆動する油圧駆動システムと、前記油圧アクチュエータの動作を指示する操作装置と、前記操作装置の操作量に応じた前記油圧駆動システムへの制御信号を出力する制御装置とを備えた作業機械において、前記制御装置は、前記操作装置の操作量をもとに前記油圧駆動システムの制御対象要素の目標制御量を算出する目標制御量演算部と、前記油圧駆動システムの稼働状態を検出する稼働状態検出部と、前記目標制御量と前記稼働状態検出部の検出結果とを学習データとして記憶する学習データ記憶部と、前記学習データ記憶部に記憶された前記学習データをもとに、前記目標制御量に対する前記制御対象要素の制御量を機械学習する学習部と、前記学習部における前記機械学習の学習結果を用いて、前記目標制御量に対する前記制御量の予測値である予測制御量を算出する予測部と、前記予測制御量が前記目標制御量に近づくように前記制御信号を補正する制御信号補正部とを有するものとする。
【発明の効果】
【0009】
本発明によれば、作動環境の変化や油圧構成要素の性能ばらつきおよび性能劣化を含む油圧駆動システムの稼働状態の変動に関わらず、操作入力に対する油圧駆動システムの制御対象要素の制御量の関係が一定に保たれるため、作業機械の制御ロバスト性を向上させることが可能となる。
【図面の簡単な説明】
【0010】
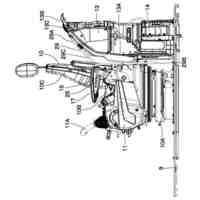
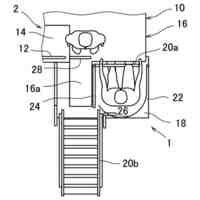
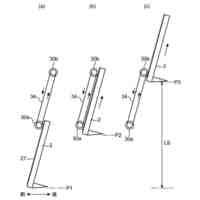
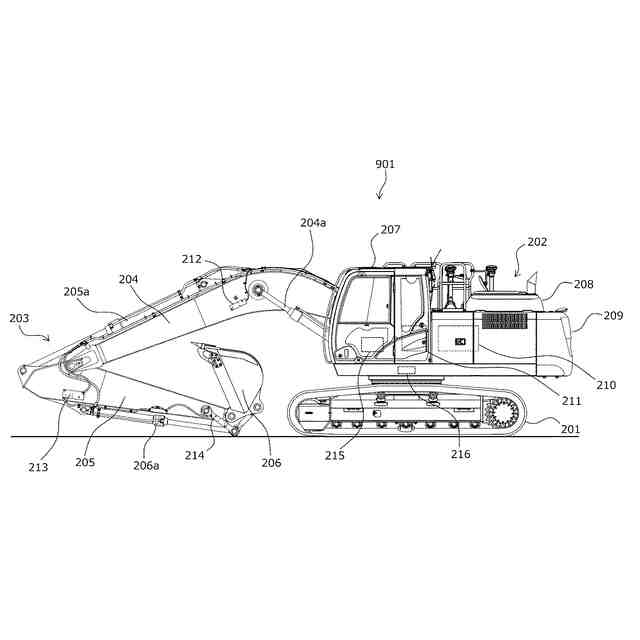
本発明の実施形態に係る油圧ショベルの側面図
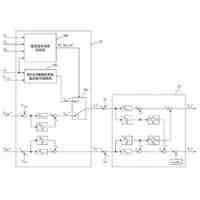
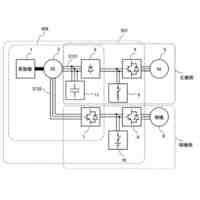
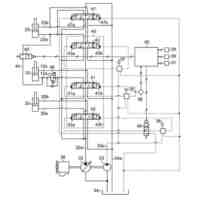
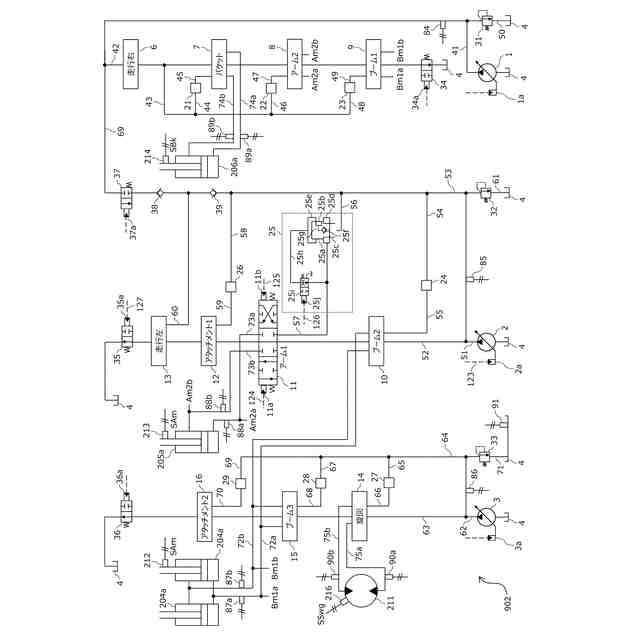
本発明の第1の実施例における油圧駆動システムの回路図(1/2)
本発明の第1の実施例における油圧駆動システムの回路図(2/2)
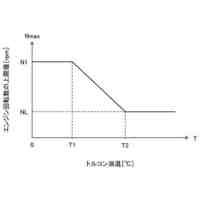
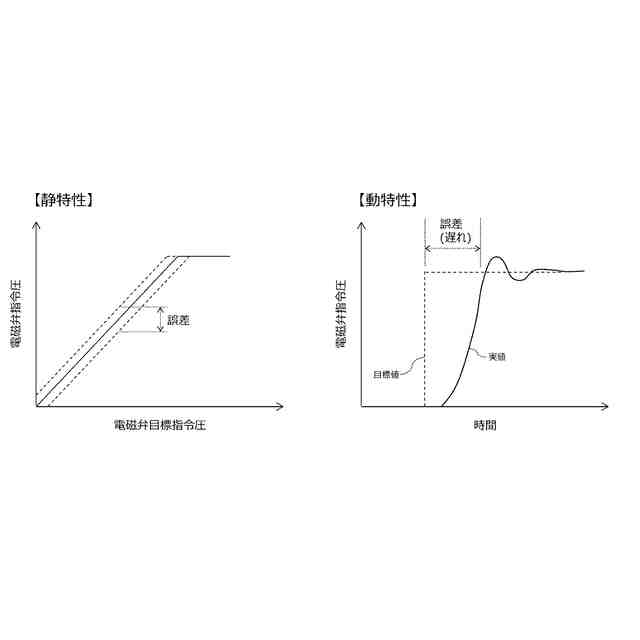
本発明の第1の実施例における電磁弁の動作特性を示す図
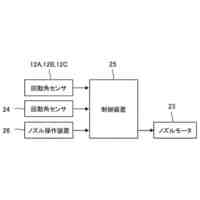
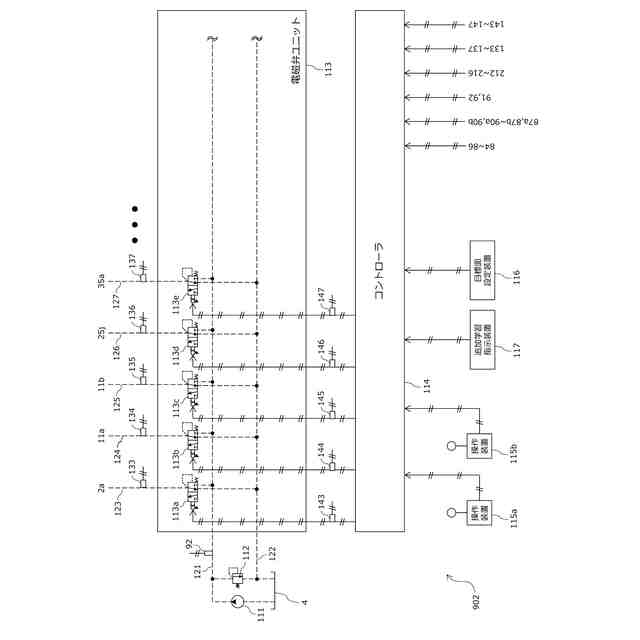
本発明の第1の実施例におけるコントローラの機能ブロック図
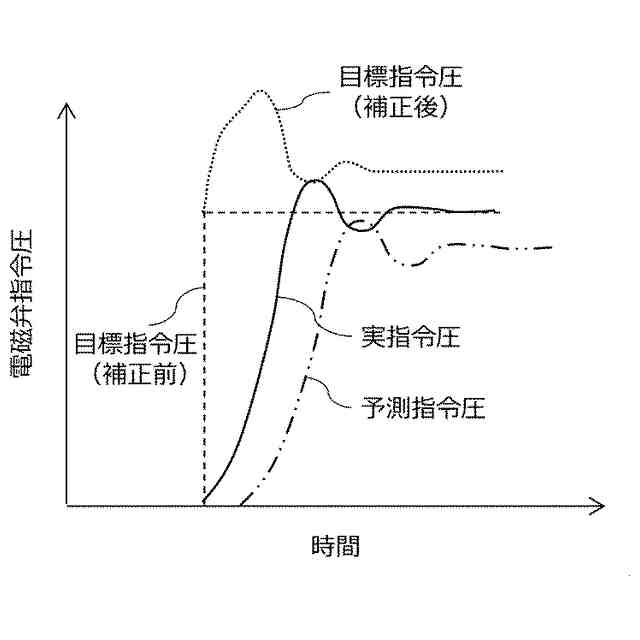
本発明の第1の実施例における電磁弁目標指令圧の補正方法を示す図
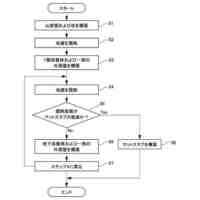
本発明の第1の実施例におけるコントローラの学習処理に係る演算処理を示すフローチャート
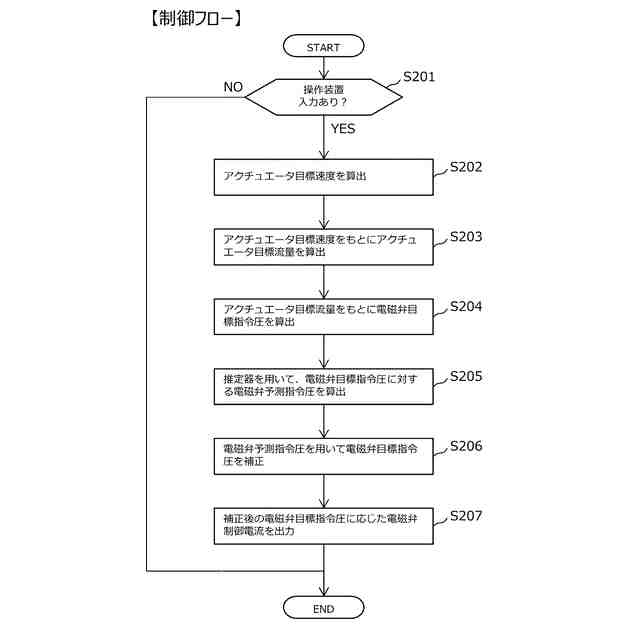
本発明の第1の実施例におけるコントローラの油圧駆動システムの制御に係る演算処理を示すフローチャート
本発明の第2の実施例におけるコントローラの機能ブロック図
本発明の第2の実施例におけるコントローラの学習処理に係る演算処理を示すフローチャート
本発明の第2の実施例におけるコントローラの油圧駆動システムの制御に係る演算処理を示すフローチャート
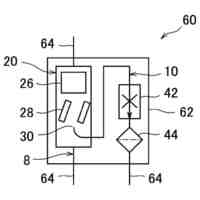
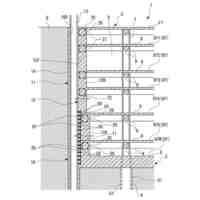
本発明の第3の実施例における油圧駆動システムの一部を示す回路図
本発明の第3の実施例におけるコントローラの機能ブロック図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
今日
日立建機株式会社
作業車両
1日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
建設機械
4日前
日立建機株式会社
電気駆動システム
1日前
日立建機株式会社
作業機械の周囲監視装置
1日前
日立建機株式会社
誘導発電機を用いた発電システム
今日
日立建機株式会社
フィルタ装置及びそれを備えた作業機械
1日前
個人
防災水嚢
7日前
生企工営株式会社
ツース盤
1か月前
株式会社大林組
接続構造
11日前
株式会社パルパルス
環境保全資材
1か月前
株式会社トラバース
拡底型の鋼管杭
26日前
日本車輌製造株式会社
杭打機
22日前
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
今日
住友重機械工業株式会社
作業機械
11日前
大成建設株式会社
地下構造物の構築方法
11日前
日立建機株式会社
深礎掘削機
29日前
株式会社エンバイン
螺旋状掛止め材
1日前
SUS株式会社
ユニットハウス用基礎
29日前
株式会社丸島アクアシステム
除塵装置
26日前
株式会社不動テトラ
地盤改良方法
19日前
株式会社大林組
複合地盤検討方法
18日前
大成建設株式会社
合成壁構造
1日前
大和ハウス工業株式会社
スラブ構築方法
25日前
日立建機株式会社
建設機械
11日前
日本建設技術株式会社
盛土造成構造
1か月前
日本車輌製造株式会社
建設機械の表示装置
1日前
日立建機株式会社
建設機械
26日前
コベルコ建機株式会社
作業機械の溶接構造
18日前
日立建機株式会社
建設機械
27日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ