TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024102615
公報種別
公開特許公報(A)
公開日
2024-07-31
出願番号
2023006624
出願日
2023-01-19
発明の名称
作業現場の管理システム及び作業現場の管理方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
9/20 20060101AFI20240724BHJP(水工;基礎;土砂の移送)
要約
【課題】作業現場において無人ダンプトラックが走行可能な走行エリアを設定すること。
【解決手段】作業現場の管理システムは、無人ダンプトラックが走行可能な走行エリアを作業現場に設定するためのサーベイ開始指令を前記作業現場で稼働するショベルに送信する指令送信部と、サーベイ開始指令に基づいてショベルにより検出された作業現場のサーベイデータを受信するデータ受信部と、サーベイデータに基づいて、走行エリアのエッジラインを設定する走行エリア設定部と、走行停止ライン設定部とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
無人ダンプトラックが走行可能な走行エリアを作業現場に設定するためのサーベイ開始指令を前記作業現場で稼働するショベルに送信する指令送信部と、
前記サーベイ開始指令に基づいて前記ショベルにより検出された前記作業現場のライン状部位の位置を示すサーベイデータを受信するデータ受信部と、
前記サーベイデータに基づいて、前記走行エリアのエッジラインを設定する走行エリア設定部と、を備える、
作業現場の管理システム。
続きを表示(約 1,200 文字)
【請求項2】
前記ショベルは、バケットを含む作業機を有し、
前記バケットにより前記サーベイデータが検出される、
請求項1に記載の作業現場の管理システム。
【請求項3】
前記エッジラインに基づいて、前記ショベルの走行停止ラインを設定する走行停止ライン設定部を備える、
請求項1に記載の作業現場の管理システム。
【請求項4】
前記走行停止ライン設定部は、前記エッジラインから前記走行エリアの外側に所定距離だけずらした位置に前記走行停止ラインを設定する、
請求項3に記載の作業現場の管理システム。
【請求項5】
入力装置を備え、
前記入力装置から前記走行停止ライン設定部に前記所定距離が入力される、
請求項4に記載の作業現場の管理システム。
【請求項6】
前記作業現場に、斜面と、前記斜面の上端部に接続される第1走行面と、前記斜面の下端部に接続される第2走行面とが存在し、
前記ショベルは、前記ショベルの走行体の少なくとも一部が前記第1走行面に位置付けられた状態で前記斜面を掘削して、前記第2走行面に存在する前記無人ダンプトラックに掘削物を積み込み、
前記走行停止ライン設定部は、前記下端部から前記上端部までの高さと前記斜面の傾斜角度とに基づいて、前記入力装置から入力された前記所定距離の適否を判定する、
請求項5に記載の作業現場の管理システム。
【請求項7】
前記走行エリアの外側の作業現場の掘削部位が前記ショベルにより掘削され、
前記走行停止ライン設定部は、前記掘削部位の掘削状態に基づいて、前記走行停止ラインを更新する、
請求項3に記載の作業現場の管理システム。
【請求項8】
前記ショベルは、バケットを含む作業機を有し、
前記走行停止ライン設定部は、前記バケットの位置に基づいて、前記掘削部位の掘削状態を判定する、
請求項7に記載の作業現場の管理システム。
【請求項9】
入力装置を備え、
前記走行エリア設定部は、前記入力装置からの入力データに基づいて、前記エッジラインを更新する、
請求項7に記載の作業現場の管理システム。
【請求項10】
前記作業現場に、斜面と、前記斜面の上端部に接続される第1走行面と、前記斜面の下端部に接続される第2走行面とが存在し、
前記ショベルは、前記ショベルの走行体の少なくとも一部が前記第1走行面に位置付けられた状態で前記斜面を掘削して、前記第2走行面に存在する前記無人ダンプトラックに掘削物を積み込み、
前記ライン状部位は、前記下端部を含み、
前記下端部に沿って前記エッジラインが設定される、
請求項1に記載の作業現場の管理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業現場の管理システム及び作業現場の管理方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
作業現場の管理システムに係る技術分野において、特許文献1に開示されているような工具追跡を備える制御システムが知られている。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2012/0136525号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業現場において無人ダンプトラックが稼働する場合がある。作業現場において無人ダンプトラックが走行可能な走行エリアを設定する必要が生じる場合がある。走行エリアを効率良く設定できる技術が要望される。
【0005】
本開示は、作業現場において無人ダンプトラックが走行可能な走行エリアを設定することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、無人ダンプトラックが走行可能な走行エリアを作業現場に設定するためのサーベイ開始指令を作業現場で稼働するショベルに送信する指令送信部と、サーベイ開始指令に基づいてショベルにより検出された作業現場のライン状部位の位置を示すサーベイデータを受信するデータ受信部と、サーベイデータに基づいて、走行エリアのエッジラインを設定する走行エリア設定部と、を備える、作業現場の管理システムが提供される。
【発明の効果】
【0007】
本開示によれば、作業現場において無人ダンプトラックが走行可能な走行エリアを設定することができる。
【図面の簡単な説明】
【0008】
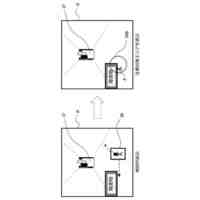
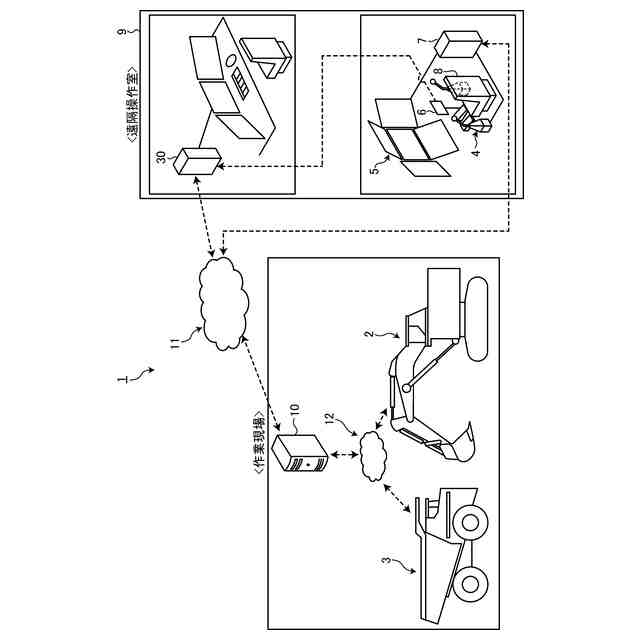
図1は、実施形態に係る作業現場の管理システムを模式的に示す図である。
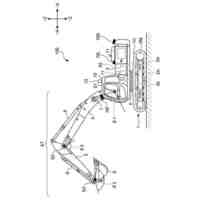
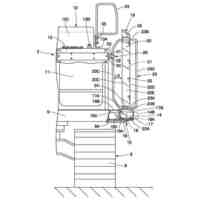
図2は、実施形態に係るショベル及び無人ダンプトラックを模式的に示す図である。
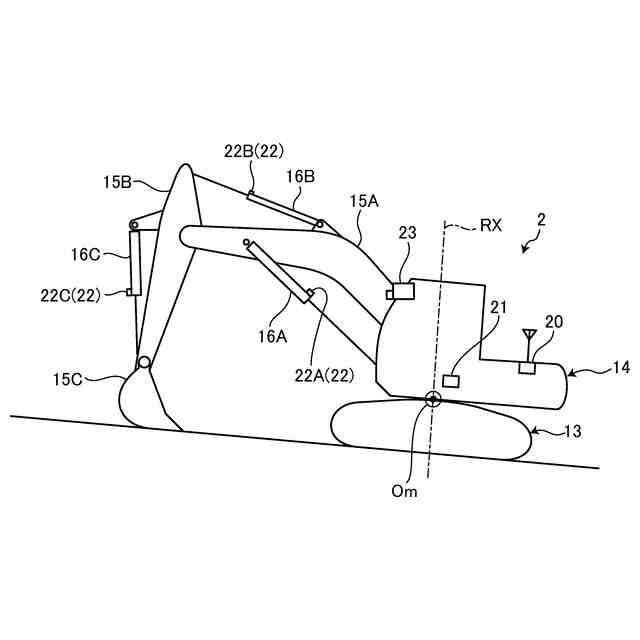
図3は、実施形態に係るショベルを模式的に示す図である。
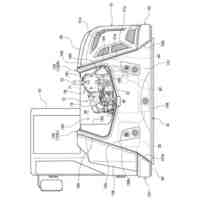
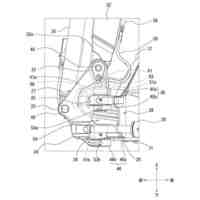
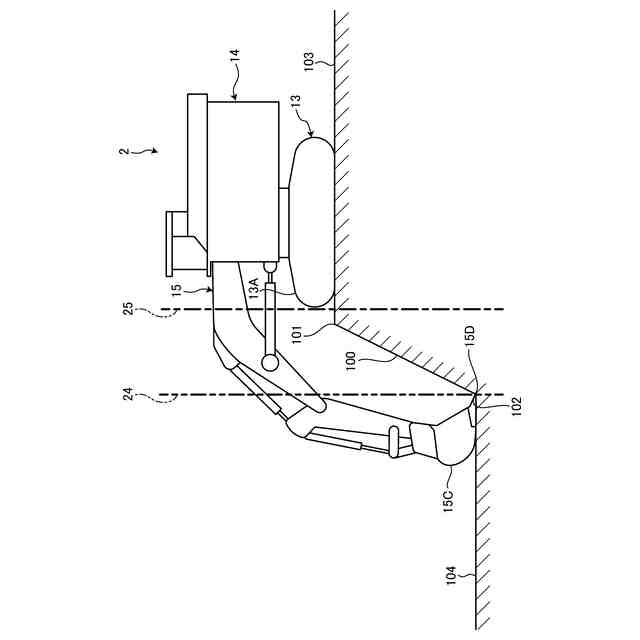
図4は、実施形態に係るショベルの動作を模式的に示す図である。
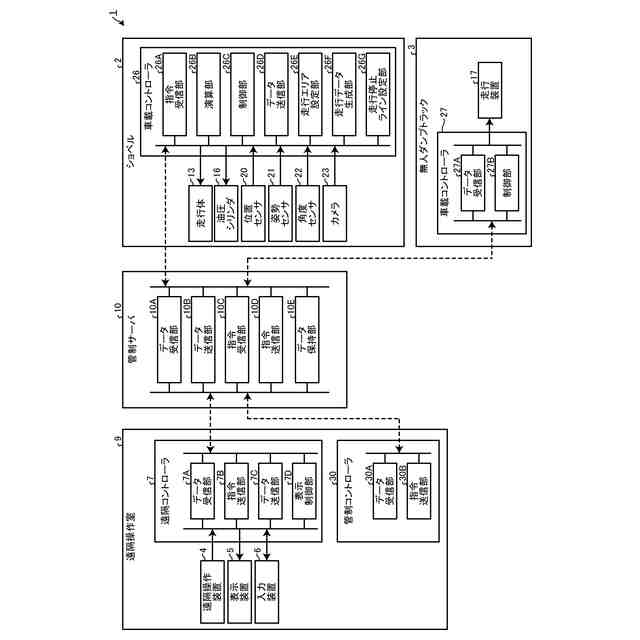
図5は、実施形態に係る管理システムを示す機能ブロック図である。
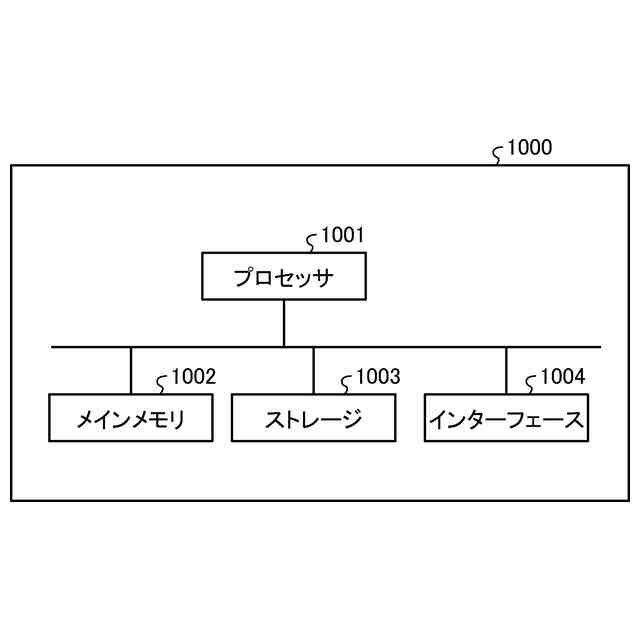
図6は、実施形態に係るコンピュータシステムを示すブロック図である。
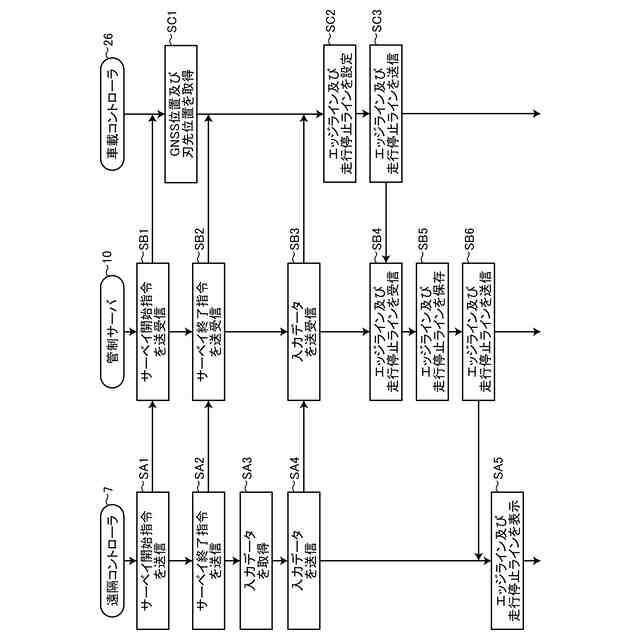
図7は、実施形態に係る作業現場の管理方法を示すフローチャートである。
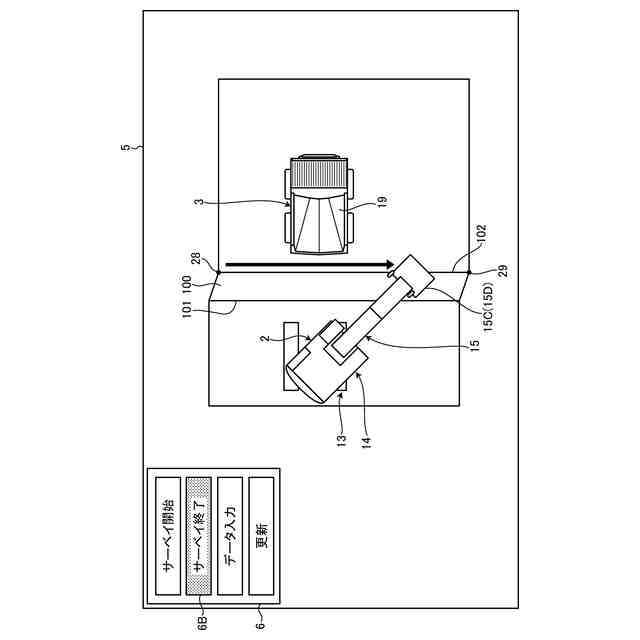
図8は、実施形態に係る表示装置に表示される表示データを示す図である。
図9は、実施形態に係る表示装置に表示される表示データを示す図である。
図10は、実施形態に係る表示装置に表示される表示データを示す図である。
図11は、実施形態に係る表示装置に表示される表示データを示す図である。
図12は、実施形態に係る表示装置に表示される表示データを示す図である。
図13は、実施形態に係る高さ方向の掘削状態の判定方法を説明するための図である。
図14は、実施形態に係る奥行方向の掘削状態の判定方法を説明するための図である。
図15は、実施形態に係る表示装置に表示される表示データを示す図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[作業現場]
図1は、実施形態に係る作業現場の管理システム1を模式的に示す図である。管理システム1は、作業現場で稼働するショベル2及び無人ダンプトラック3を管理する。ショベル2は、遠隔操作装置4により遠隔操作される。遠隔操作装置4は、ショベル2の外部に配置される。遠隔操作装置4は、ショベル2の外部の遠隔操作地に設けられた遠隔操作室9に配置される。実施形態において、管理システム1は、遠隔操作装置4と、表示装置5と、入力装置6と、遠隔コントローラ7と、管制コントローラ30とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日鉄建材株式会社
土砂捕捉柵
13日前
日鉄建材株式会社
土砂捕捉柵
13日前
株式会社高知丸高
仮締切構造体
1日前
株式会社パルパルス
抜け止め装置
15日前
大和ハウス工業株式会社
バケット
13日前
日本ソリッド株式会社
防舷材の保護方法
7日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
作業機械
15日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業機械
6日前
住友重機械工業株式会社
ショベル
21日前
住友重機械工業株式会社
ショベル
20日前
株式会社サンライズ
擁壁排水管用カバー
21日前
株式会社西原鉄工所
コンクリートブロック
9日前
株式会社テノックス
共回り監視装置
9日前
株式会社テノックス
深層混合処理工法
9日前
西部電機株式会社
水門開閉装置
6日前
株式会社日立建機ティエラ
作業機械
13日前
炎重工株式会社
桟橋及び移動体システム
13日前
株式会社日立建機ティエラ
建設機械
13日前
鹿島建設株式会社
運搬機構および管体の搬送方法
7日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
建設機械
20日前
日立建機株式会社
建設機械
14日前
C技研株式会社
切削装置
9日前
コベルコ建機株式会社
作業機械の制御装置
14日前
日立建機株式会社
建設機械
14日前
ヤンマーホールディングス株式会社
作業機械
20日前
ヤンマーホールディングス株式会社
建設機械
20日前
日鉄建材株式会社
梁部材の取付構造及び土砂捕捉柵
13日前
ヤンマーホールディングス株式会社
建設機械
14日前
日立建機株式会社
プラグ
20日前
ヤンマーホールディングス株式会社
作業機械
14日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
作業機械
14日前
日立建機株式会社
作業機械
15日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ