TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024089156
公報種別
公開特許公報(A)
公開日
2024-07-03
出願番号
2022204347
出願日
2022-12-21
発明の名称
ロボットシステム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
13/08 20060101AFI20240626BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットへの教示と管理を簡略化したロボットシステムを提供する。
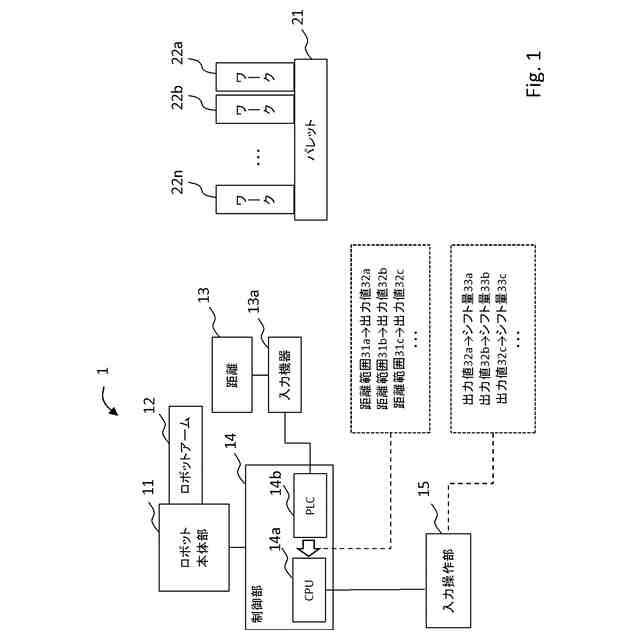
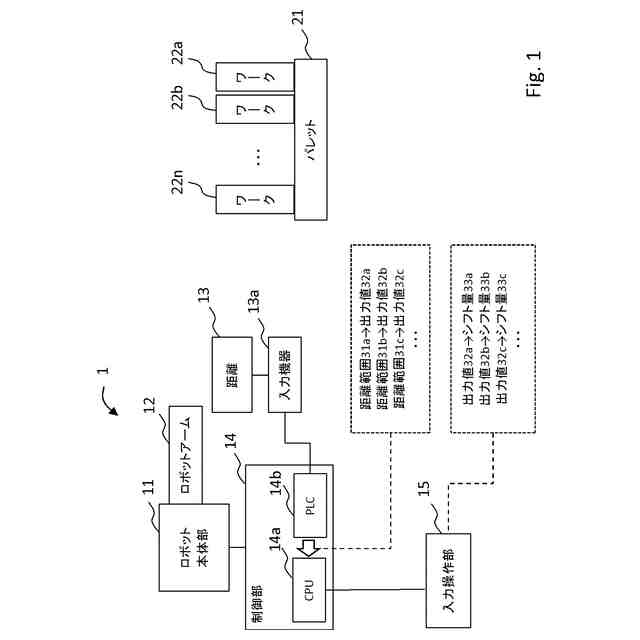
【解決手段】ロボットアーム12と、パレット21上に配された複数のワーク22a~22nの位置を計測する距離センサ13と、複数のワーク22a~22nのうちの1つのワーク22aを基準ワークとし、基準ワークの位置を基準位置とした場合に、距離センサ13から複数のワーク22a~22nの夫々の距離に応じて、基準位置からのシフト量33a~33nを夫々設定する入力操作部15と、入力操作部15により設定されたシフト量33a~33nに応じて、ロボットアーム12の動作を制御する制御部14と、を備え、制御部14は、ロボットアーム12について基準ワークの基準位置で教示された状態から、入力操作部15で設定された基準位置からのシフト量33a~33nを利用して、教示位置が複数のワーク22b~22nの夫々の位置となるように変更しながら教示を繰り返す。
【選択図】図1
特許請求の範囲
【請求項1】
制御プログラムに基づいてロボットアームを動作させ、パレット上に配された複数のワークを移動させるロボットシステムであって、
ロボットアームと、
前記パレット上に配された複数のワークの位置を計測する距離センサと、
前記複数のワークのうちの1つのワークを基準ワークとし、前記基準ワークの位置を基準位置とした場合に、前記距離センサから前記複数のワークの夫々の距離に応じて、前記基準位置からのシフト量を夫々設定する入力操作部と、
前記入力操作部により設定された前記シフト量に応じて、前記ロボットアームの動作を制御する制御部と、を備え、
前記制御部は、
前記ロボットアームについて前記基準ワークの基準位置で教示された状態から、前記入力操作部で設定された基準位置からの前記シフト量を利用して、教示位置が前記複数のワークの夫々の位置となるように変更しながら教示を繰り返す、
ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、車両を生産する際に、車両を構成している各部のワークを移動するためにロボットが利用されている。例えばロボットは、位置決めされたパレットに整列されたワークの取り出しや、加工が終了したワークをパレットに整列させる。これらの動作をロボットに実行させる場合には、ロボットに対して、パレット内の全ワークのセット位置ごとの教示が必要となる。
【0003】
特許文献1には、ロボットに対する教示データの作成を容易に行うことができるロボットシステムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2018-043320号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら近年では、少量多車種のニーズに向けて、需要に敏感な生産ラインが増加している。この生産ラインは、容易に変種変量が対応可能なラインであって、一台のロボットで処理しなくてはならないワークやパレットの数が増加する。
【0006】
また一般的に、生産工程に配されるロボットの繰り返し動作は、全て事前に人間による教示が行われている。このようなロボットでは、各車種について、ワークの取り出しや、セット位置ごとの動作の制御プログラムを作成する必要がある。そのため、膨大な工数がかかるとともに、日々の管理や異常発生時の処理が複雑になる。
【0007】
本開示は、ロボットへの教示と管理を簡略化したロボットシステムを提供するものである。
【課題を解決するための手段】
【0008】
本開示にかかるロボットシステムは、制御プログラムに基づいてロボットアームを動作させ、パレット上に配された複数のワークを移動させるロボットシステムであって、ロボットアームと、前記パレット上に配された複数のワークの位置を計測する距離センサと、前記複数のワークのうちの1つのワークを基準ワークとし、前記基準ワークの位置を基準位置とした場合に、前記距離センサから前記複数のワークの夫々の距離に応じて、前記基準位置からのシフト量を夫々設定する入力操作部と、前記入力操作部により設定された前記シフト量に応じて、前記ロボットアームの動作を制御する制御部と、を備え、前記制御部は、前記ロボットアームについて前記基準ワークの基準位置で教示された状態から、前記入力操作部で設定された基準位置からの前記シフト量を利用して、教示位置が前記複数のワークの夫々の位置となるように変更しながら教示を繰り返す。
これにより、パレット上の1つのワークの位置を基準位置とし、基準位置から各ワークの位置へのスライド移動量を利用して、各ワークの位置へのロボットアームの動作を設定することができる。
【発明の効果】
【0009】
本開示よれば、ロボットへの教示と管理を簡略化したロボットシステムを提供することができる。
【図面の簡単な説明】
【0010】
ロボットシステムの構成の一例を示すブロック図である。
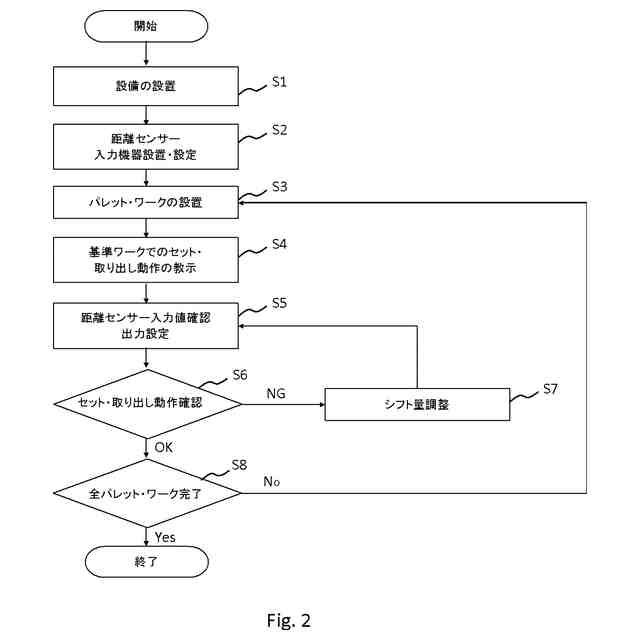
ロボットシステムにおける教示及び実際の動作手順を示したフロー図である。
制御プログラムの一例をステップ単位で示した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
3か月前
株式会社ツノダ
挟持工具
4か月前
株式会社右川ゴム製造所
把持装置
3か月前
日東工器株式会社
衝撃工具
10日前
川崎重工業株式会社
ハンド
4か月前
学校法人立命館
グリッパ
3か月前
株式会社マキタ
動力工具
1か月前
株式会社不二越
ロボット
6か月前
川崎重工業株式会社
罫書用治具
27日前
学校法人立命館
ロボットハンド
4か月前
株式会社ダイヘン
搬送装置
1か月前
個人
プーリーキー抜き治具
3か月前
株式会社ダイヘン
搬送装置
1か月前
トヨタ自動車株式会社
ハンド構造
17日前
国立大学法人山形大学
二重関節機構
1か月前
宮川工機株式会社
板状部品移動装置
1か月前
東京都公立大学法人
ロボットハンド
2か月前
CKD株式会社
電動把持装置
2か月前
株式会社不二越
予測システム
4か月前
株式会社共和製作所
ロボット用アーム
2か月前
小倉クラッチ株式会社
ロボットハンド
6か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
マックス株式会社
打ち込み工具
3日前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
5か月前
個人
スロープバリビス-ビス&-ドライバー
1か月前
マックス株式会社
打ち込み工具
3日前
株式会社ダイヘン
画像生成装置
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ