TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024083765
公報種別
公開特許公報(A)
公開日
2024-06-24
出願番号
2022197766
出願日
2022-12-12
発明の名称
情報処理装置、及び情報処理方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
9/16 20060101AFI20240617BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
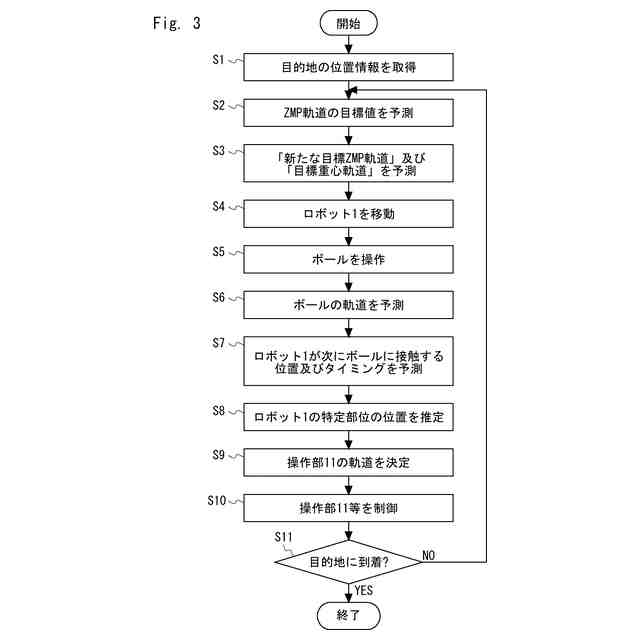
【課題】ロボットの特定部位の予測位置を適切に算出すること。
【解決手段】物体に接触して前記物体を操作する操作部と、前記操作部が接続される胴体部と、を有するロボットの特定の時点における重心位置を予測する予測部と、前記予測部により予測された重心位置に基づき、前記特定の時点における前記ロボットの特定部位の位置を推定する推定部と、前記推定部による推定結果に基づいて、前記操作部を制御する制御部と、を有する情報処理装置が提供される。
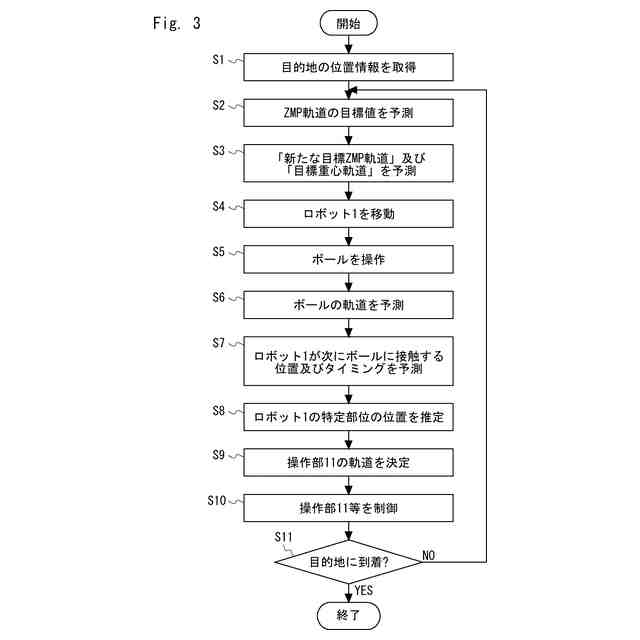
【選択図】図3
特許請求の範囲
【請求項1】
物体に接触して前記物体を操作する操作部と、前記操作部が接続される胴体部と、を有するロボットの特定の時点における重心位置を予測する予測部と、
前記予測部により予測された重心位置に基づき、前記特定の時点における前記ロボットの特定部位の位置を推定する推定部と、
前記推定部による推定結果に基づいて、前記操作部を制御する制御部と、
を有する情報処理装置。
続きを表示(約 400 文字)
【請求項2】
前記予測部は、前記操作部により操作された前記物体の軌道を予測し、
前記推定部は、前記操作部が前記物体に接触する際の前記ロボットの特定部位の位置を推定する、
請求項1に記載の情報処理装置。
【請求項3】
前記制御部は、前記操作部が前記物体に接触する際の、前記ロボットの重心位置の高さ、及び前記胴体部の姿勢が特定の値となるように前記ロボットを制御する、
請求項2に記載の情報処理装置。
【請求項4】
物体に接触して前記物体を操作する操作部と、前記操作部が接続される胴体部と、を有するロボットの特定の時点における重心位置を予測し、
予測した重心位置に基づき、前記特定の時点における前記ロボットの特定部位の位置を推定し、
推定結果に基づいて、前記操作部を制御する、
処理をコンピュータが実行する情報処理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理装置、及び情報処理方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、自由度がより低いロボットの動的モデルに対しモデル予測制御
を用いて移動型ロボットの重心の予測軌道を計算し、自由度がより高い一般化逆運動学を用いて多関節四肢の動作を計算する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6715952号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、例えば、関節等の自由度が比較的高い人型等のロボットの場合、ロボットの全身に対して逆運動学を用いた計算を行うと、計算コストが比較的大きくなる場合がある。
【0005】
本開示の目的は、ロボットの特定部位の予測位置を適切に算出できる技術を提供することである。
【課題を解決するための手段】
【0006】
本開示に係る第1の態様では、物体に接触して前記物体を操作する操作部と、前記操作部が接続される胴体部と、を有するロボットの特定の時点における重心位置を予測する予測部と、前記予測部により予測された重心位置に基づき、前記特定の時点における前記ロボットの特定部位の位置を推定する推定部と、前記推定部による推定結果に基づいて、前記操作部を制御する制御部と、を有する情報処理装置が提供される。
【0007】
また、本開示に係る第2の態様では、物体に接触して前記物体を操作する操作部と、前記操作部が接続される胴体部と、を有するロボットの特定の時点における重心位置を予測し、予測した重心位置に基づき、前記特定の時点における前記ロボットの特定部位の位置を推定し、推定結果に基づいて、前記操作部を制御する、処理をコンピュータが実行する情報処理方法が提供される。
【発明の効果】
【0008】
一側面によれば、ロボットの特定部位の予測位置を適切に算出できる。
【図面の簡単な説明】
【0009】
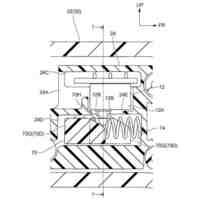
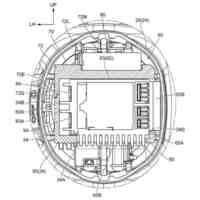
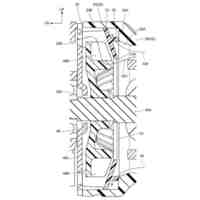
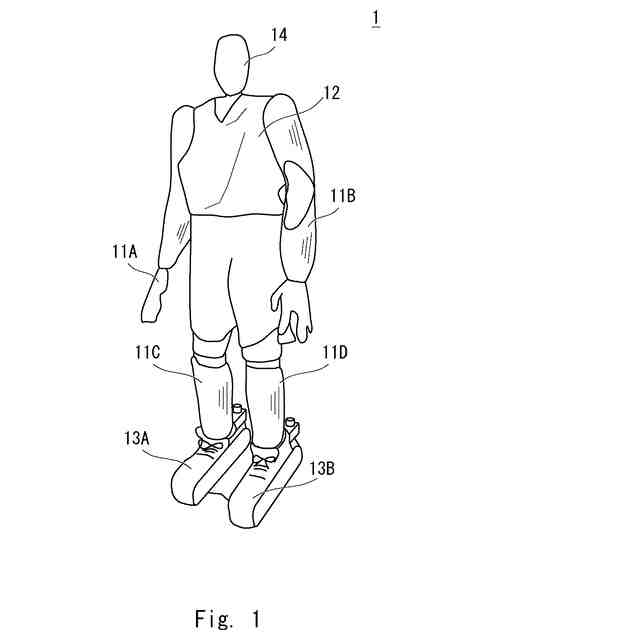
実施形態に係るロボットの構成の一例を示す図である。
実施形態に係る情報処理装置の構成の一例を示す図である。
実施形態に係る情報処理装置の処理の一例を示すフローチャートである。
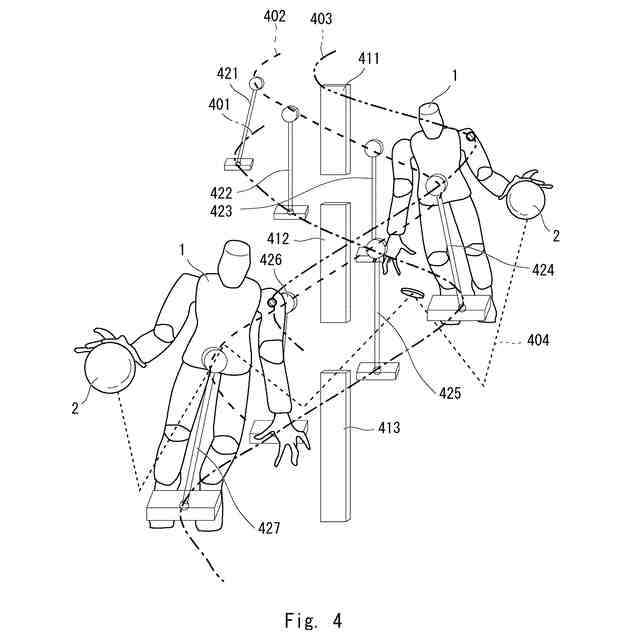
実施形態に係るロボットの目標ZMPの軌道、目標とする重心の軌道、ロボットの左肩部の位置の軌道、ボールの軌道の一例を示す図である。
実施形態に係る情報処理装置20のハードウェア構成例を示す図である。
【発明を実施するための形態】
【0010】
本開示の原理は、いくつかの例示的な実施形態を参照して説明される。これらの実施形態は、例示のみを目的として記載されており、本開示の範囲に関する制限を示唆することなく、当業者が本開示を理解および実施するのを助けることを理解されたい。本明細書で説明される開示は、以下で説明されるもの以外の様々な方法で実装される。
以下の説明および特許請求の範囲において、他に定義されない限り、本明細書で使用されるすべての技術用語および科学用語は、本開示が属する技術分野の当業者によって一般に理解されるのと同じ意味を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
3か月前
株式会社ツノダ
挟持工具
4か月前
株式会社右川ゴム製造所
把持装置
2か月前
日東工器株式会社
衝撃工具
3日前
川崎重工業株式会社
ハンド
4か月前
株式会社マキタ
動力工具
1か月前
川崎重工業株式会社
罫書用治具
20日前
学校法人立命館
グリッパ
3か月前
学校法人立命館
ロボットハンド
3か月前
個人
プーリーキー抜き治具
3か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
トヨタ自動車株式会社
ハンド構造
10日前
CKD株式会社
電動把持装置
1か月前
国立大学法人山形大学
二重関節機構
1か月前
宮川工機株式会社
板状部品移動装置
1か月前
株式会社不二越
予測システム
4か月前
東京都公立大学法人
ロボットハンド
1か月前
工機ホールディングス株式会社
作業機
19日前
株式会社中村製作所
トルクドライバー
3か月前
工機ホールディングス株式会社
作業機
19日前
工機ホールディングス株式会社
作業機
19日前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
2か月前
株式会社ダイヘン
情報処理装置
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
5か月前
小倉クラッチ株式会社
ロボットハンド
6か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社共和製作所
ロボット用アーム
2か月前
個人
スロープバリビス-ビス&-ドライバー
1か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ