TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024083250
公報種別
公開特許公報(A)
公開日
2024-06-20
出願番号
2023191670
出願日
2023-11-09
発明の名称
電気車両の変速システム及びそれを制御する方法
出願人
光陽工業股分有限公司
代理人
弁理士法人浅村特許事務所
主分類
B60W
10/04 20060101AFI20240613BHJP(車両一般)
要約
【課題】電気車両の変速システム及びそれを制御する方法を提供する。
【解決手段】電気車両の制御ユニットは、ギヤシフトを行なうために動力モータの回転速度及び動力モータにより出力されている操作ねじり力に基づいて目標ねじり力を計算し、ギヤシフトを実行している際に、制御ユニットは、動力モータを制御して、ねじり力の出力を操作ねじり力から目標ねじり力となるように変換し、更に、ねじり力の出力を目標ねじり力から操作ねじり力に戻るように変換する。
【選択図】図2
特許請求の範囲
【請求項1】
電気車両の変速システムを制御するための制御方法であって、
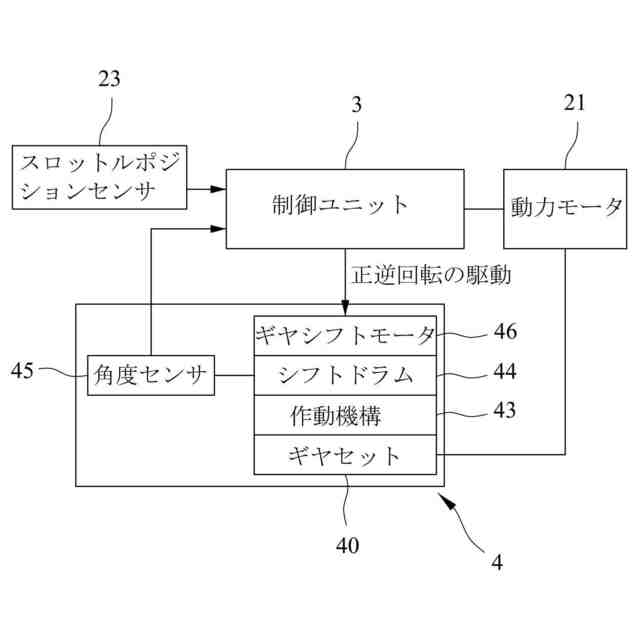
前記電気車両は、制御ユニットと、車両を推進する動力を提供するための動力モータと、前記電気車両のアクセル制御の位置を検出してアクセルポジション信号を生成し且つ前記制御ユニットへ送信するためのアクセルポジションセンサと、変速装置と、を備えており、
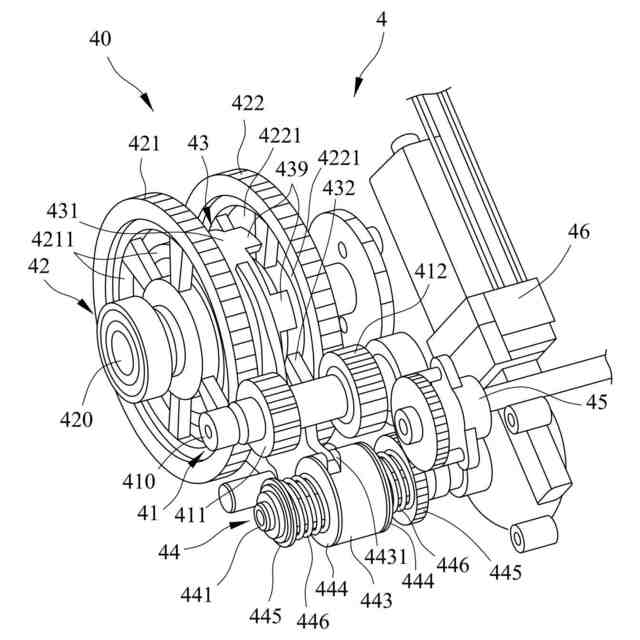
前記変速装置は、前記動力モータと接続されて前記動力モータからの動力を伝達するためのギヤセットと、前記ギヤセットと接続されている作動機構と、前記作動機構と接続されているシフトドラムと、前記シフトドラムと接続されて前記シフトドラムの回転角度を制御して、前記作動機構がギヤシフトを行なうことができるように構成されるギヤシフトモータと、を備えており、
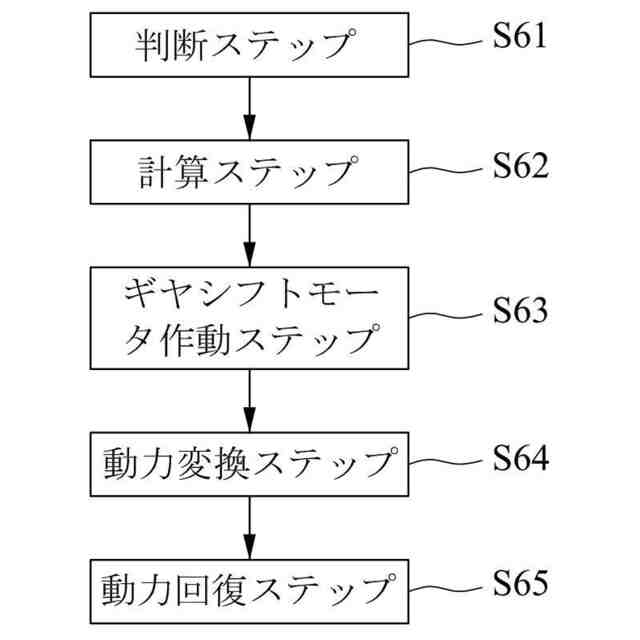
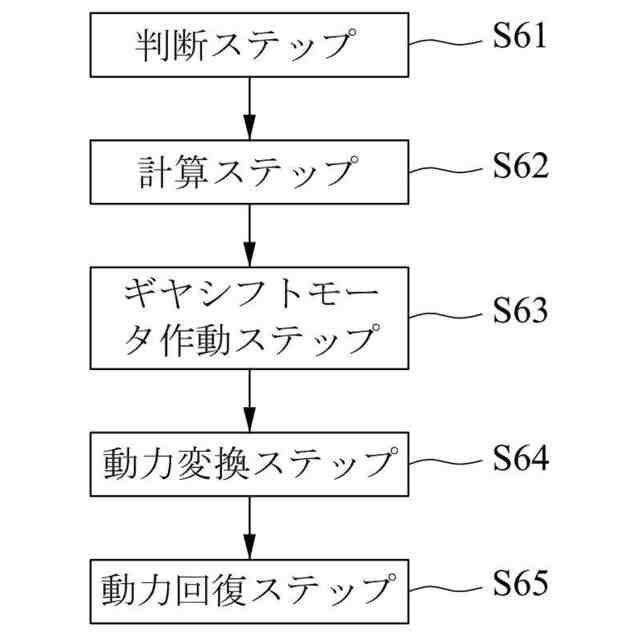
前記制御方法は、
前記制御ユニットにより、前記動力モータの回転速度を示す回転速度情報を受信し、前記回転速度情報に基づいて前記ギヤシフトモータを制御してギヤシフトを行なうか否かを判断する判断ステップと、
前記制御ユニットにより、前記ギヤシフトモータを制御してギヤシフトを行なうと判断すると、前記回転速度情報と、前記アクセルポジション信号に対応するとともに前記動力モータにより出力されている操作ねじり力とに基づいて、目標ねじり力を計算する計算ステップと、
前記制御ユニットにより、前記ギヤシフトモータの作動を駆動して、前記シフトドラムの回転を開始させるギヤシフトモータ作動ステップと、
前記制御ユニットにより、前記動力モータを制御して、ねじり力の出力を前記操作ねじり力から前記目標ねじり力となるように変換して、前記ギヤセットに対してギヤシフトを行なう動力変換ステップと、
前記制御ユニットにより、前記動力モータを制御して、前記ねじり力の出力を前記目標ねじり力から前記操作ねじり力に戻るように変換する動力回復ステップと、を含んでいる、
ことを特徴とする電気車両の変速システムの制御方法。
続きを表示(約 2,700 文字)
【請求項2】
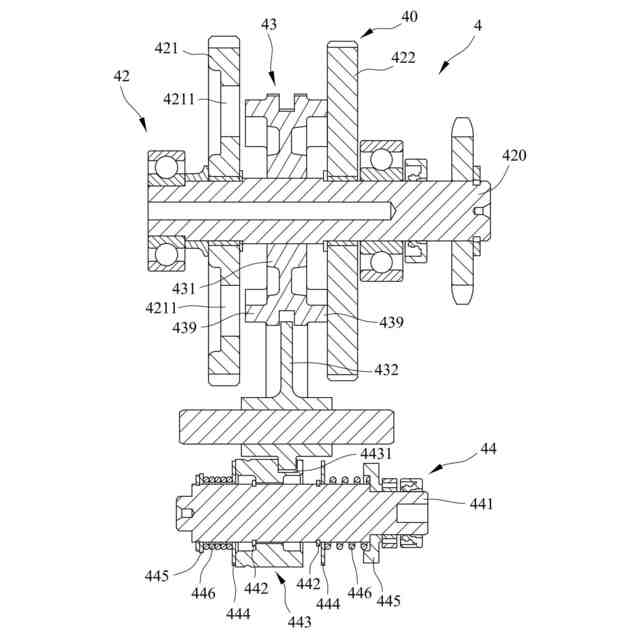
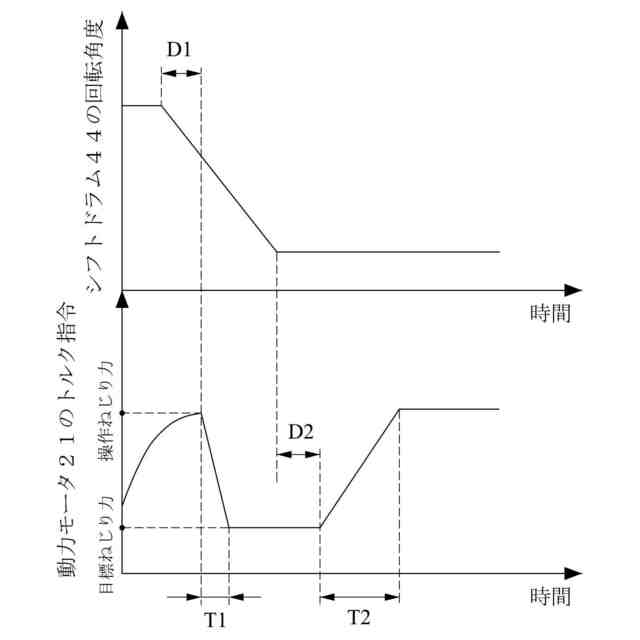
前記シフトドラムは、ドラム軸と、前記ドラム軸を取り囲んでいるとともに前記ドラム軸の軸方向において移動することができるように配置されている外側スリーブと、前記外側スリーブの両反対側にそれぞれ配置されている2つのバネと、を備えており、
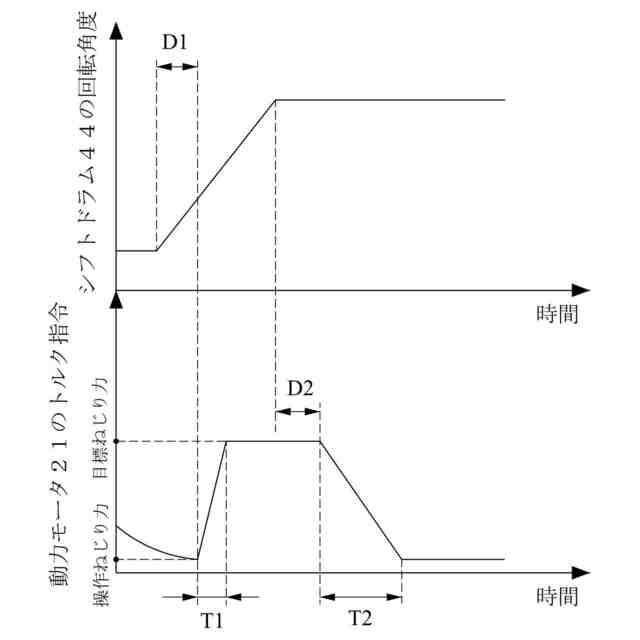
前記動力変換ステップは、前記ギヤシフトモータ作動ステップの後に、第1遅延期間を経て実施され、
前記動力回復ステップにおいて、ギヤシフトにおいて前記ドラム軸の回転が完了した後、第2遅延期間を経てから前記ねじり力の出力を前記目標ねじり力から前記操作ねじり力に戻るように変換する、
ことを特徴とする請求項1に記載の電気車両の変速システムの制御方法。
【請求項3】
前記計算ステップにおいて、前記制御ユニットにより、動力変換期間及び動力回復期間を更に計算し、
前記動力変換ステップにおいて、前記制御ユニットにより、前記動力モータを制御して、前記動力変換期間において前記ねじり力の出力を前記目標ねじり力となるように変換し、
前記動力回復ステップにおいて、前記制御ユニットにより、前記動力モータを制御して、前記動力回復期間において前記ねじり力の出力を前記操作ねじり力となるように変換する、
ことを特徴とする請求項1または請求項2に記載の電気車両の変速システムの制御方法。
【請求項4】
前記変速装置の前記ギヤセットは、入力軸組立体と、出力軸組立体と、を備えており、
前記入力軸組立体は、軸体と、前記軸体を取り囲むように配置されている第1入力ギヤと、前記第1入力ギヤと間隔をあけて前記軸体を取り囲むように配置されている第2入力ギヤと、を備えており、
前記出力軸組立体は、軸棒と、前記軸棒を取り囲むように配置されているとともに前記第1入力ギヤと噛み合っている第1出力ギヤと、前記軸棒を取り囲むように配置されているとともに前記第2入力ギヤと噛み合っている第2出力ギヤと、を備えており、
前記作動機構は、前記作動機構が前記第2入力ギヤに連結される第1ギヤ位置と、前記作動機構が前記第2出力ギヤに連結される第2ギヤ位置と、の間で移動することができ、
前記判断ステップにおいて、前記制御ユニットにより、前記動力モータの回転速度が回転速度のアップシフト閾値よりも大きい場合、前記ギヤシフトモータを制御してアップシフトを行なうと判断する、
ことを特徴とする請求項1に記載の電気車両の変速システムの制御方法。
【請求項5】
前記判断ステップにおいて、前記制御ユニットにより、前記動力モータの回転速度が回転速度のダウンシフト閾値よりも小さい場合、前記ギヤシフトモータを制御してダウンシフトを行なうと判断する、
ことを特徴とする請求項4に記載の電気車両の変速システムの制御方法。
【請求項6】
前記変速装置は、角度センサを更に備えており、
前記角度センサは、前記シフトドラムと間隔をあけて前記シフトドラムの回転角度を感知して、前記シフトドラムの前記回転角度を示す角度情報を出力することができるように配置されており、
前記ギヤシフトモータ作動ステップにおいて、前記制御ユニットにより、前記角度情報を受信して前記ギヤシフトモータが正確な位置に回転したか否かを判断する、
ことを特徴とする請求項1に記載の電気車両の変速システムの制御方法。
【請求項7】
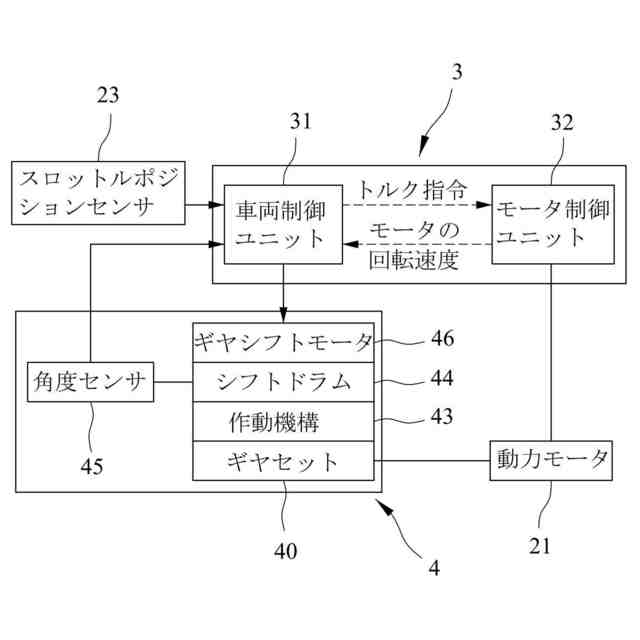
前記制御ユニットは、前記変速装置の前記ギヤシフトモータと接続されている車両制御ユニットと、前記車両制御ユニット及び前記動力モータと接続されているモータ制御ユニットと、を備えている、
ことを特徴とする請求項1に記載の電気車両の変速システムの制御方法。
【請求項8】
電気車両の変速制御システムであって、
前記電気車両は、車両を推進する動力を提供するための動力モータを備えており、
前記変速制御システムは、制御ユニットと、アクセルポジションセンサと、変速装置と、を備えており、
前記アクセルポジションセンサは、前記電気車両のアクセル制御の位置を検出してアクセルポジション信号を生成し且つ前記制御ユニットへ送信するためのものであり、
前記変速装置は、前記動力モータと接続されて前記動力モータからの動力を伝達するためのギヤセットと、前記ギヤセットと接続されている作動機構と、前記作動機構と接続されているシフトドラムと、前記シフトドラムと接続されて前記シフトドラムの回転角度を制御して前記作動機構がギヤシフトを行なうことができるように構成されるギヤシフトモータと、を備えており、
前記制御ユニットは、
前記動力モータの回転速度を示す回転速度情報を受信し、
前記回転速度情報に基づいて前記ギヤシフトモータを制御してギヤシフトを行なうか否かを判断し、
前記ギヤシフトモータを制御してギヤシフトを行なうと判断すると、前記回転速度情報と、前記アクセルポジション信号に対応するとともに前記動力モータにより出力されている操作ねじり力とに基づいて、目標ねじり力を計算し、
前記ギヤシフトモータの作動を駆動して、前記シフトドラムの回転を開始させるように構成されている、
ことを特徴とする電気車両の変速制御システム。
【請求項9】
前記制御ユニットは、
動力変換期間及び動力回復期間を計算し、
前記動力モータを制御して、ギヤシフトしている間に前記動力変換期間においてねじり力の出力を前記操作ねじり力から前記目標ねじり力となるように変換し、
前記動力モータを制御して、ギヤシフトにおいて前記ドラム軸の回転が完了した後、前記動力回復期間において前記ねじり力の出力を前記目標ねじり力から前記操作ねじり力に戻るように変換するように更に構成されている、
ことを特徴とする請求項8に記載の電気車両の変速制御システム。
【請求項10】
前記制御ユニットは、前記変速装置の前記ギヤシフトモータと接続されている車両制御ユニットと、前記車両制御ユニット及び前記動力モータと接続されているモータ制御ユニットと、を備えている、
ことを特徴とする請求項8に記載の電気車両の変速制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両に関する制御方法及び制御システムに関し、具体的には、電気車両の変速システム及びそれを制御する方法に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
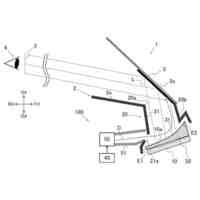
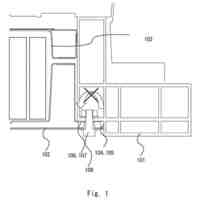
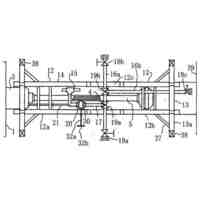
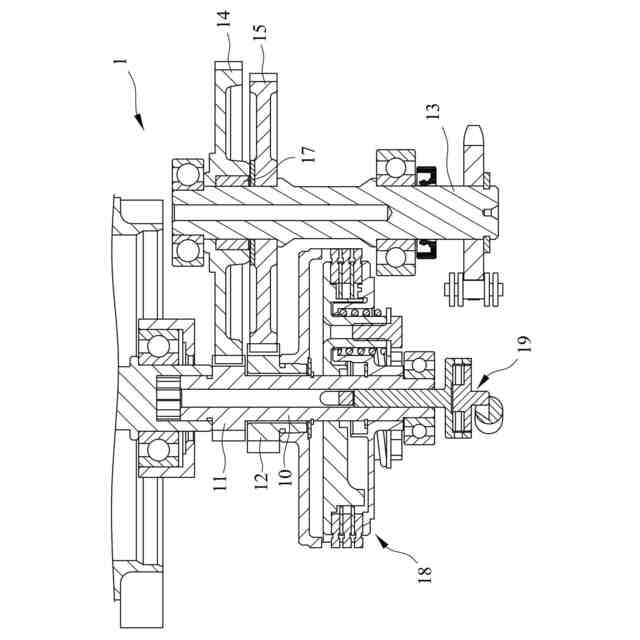
特許文献1に記載された従来の変速機構1は、図1に示されるように、駆動電源(図示せず)と接続されている入力軸10と、入力軸10を取り囲むように配置されている第1入力ギヤ11と、第1入力ギヤ11に近接しているとともに入力軸10を取り囲むように配置されている第2入力ギヤ12と、径方向に沿って入力軸10と間隔をあけるように配置されている出力軸13と、出力軸13を取り囲んでいるとともに第1入力ギヤ11と着脱可能に噛み合うことができるように配置されている第1出力ギヤ14と、出力軸13を取り囲んでいるとともに第2入力ギヤ12と着脱可能に噛み合うことができるように配置されている第2出力ギヤ15と、出力軸13と連接している一方向クラッチ17と、入力軸10と連接しているクラッチプレッシャープレート18と、入力軸10の軸方向においてクラッチプレッシャープレート18に当接するように配置されている当接機構19と、を備えている。
【0003】
当接機構19の作動によって、入力軸10により導入された動力は、クラッチプレッシャープレート18が係合状態または解除状態になることを制御することに用いられ得る。これによって、従来の変速機構1は、第1入力ギヤ11が第1出力ギヤ14と噛み合っている第1ギヤ位置と、第2入力ギヤ12が第2出力ギヤ15と噛み合っている第2ギヤ位置と、の間で切り替えられ得る。
【0004】
第1ギヤ位置においては、入力軸10により導入された動力が、第1入力ギヤ11及び第1出力ギヤ14を経由して出力軸13に伝達されて出力され得る。この際に、第2入力ギヤ12は入力軸10と共に回転するが、他のギヤと噛み合っていないので、動力は出力されることはない。一方、第2ギヤ位置においては、クラッチプレッシャープレート18の作動によって、入力軸10により導入された動力は、第2入力ギヤ12及び第2出力ギヤ15を経由して出力軸13に伝達され得る。
【先行技術文献】
【特許文献】
【0005】
台湾特許出願公開第202302408号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述のように従来の変速機構は一方向クラッチ及びクラッチプレッシャープレートを備えているが、このようなクラッチ構成を有すると、変速機構に対して構成部品が多くて体積が大きいといった問題を招いてしまう。これによって、変速機構の小型化は困難となる。
【0007】
更に、一方向クラッチ及びクラッチプレッシャープレートは、作動の際に他の部品と直接に接触するので、必然的に摩耗が生じ、定期交換を行なう必要がある。このため、モータを動力源とする電気車両の使用者にとって不便である。
【0008】
よって、本発明は上記問題点に鑑みて、上記した少なくとも1つの欠点を解決することができる電気車両の変速システム及びそれを制御する方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するための手段として、本発明は、電気車両の変速システムを制御するための制御方法であって、
前記電気車両は、制御ユニットと、車両を推進する動力を提供するための動力モータと、前記電気車両のアクセル制御の位置を検出してアクセルポジション信号を生成し且つ前記制御ユニットへ送信するためのアクセルポジションセンサと、変速装置と、を備えており、
前記変速装置は、前記動力モータと接続されて前記動力モータからの動力を伝達するためのギヤセットと、前記ギヤセットと接続されている作動機構と、前記作動機構と接続されているシフトドラムと、前記シフトドラムと接続されて前記シフトドラムの回転角度を制御して、前記作動機構がギヤシフトを行なうことができるように構成されるギヤシフトモータと、を備えており、
前記制御方法は、
前記制御ユニットにより、前記動力モータの回転速度を示す回転速度情報を受信し、前記回転速度情報に基づいて前記ギヤシフトモータを制御してギヤシフトを行なうか否かを判断する判断ステップと、
前記制御ユニットにより、前記ギヤシフトモータを制御してギヤシフトを行なうと判断すると、前記回転速度情報と、前記アクセルポジション信号に対応するとともに前記動力モータにより出力されている操作ねじり力とに基づいて、目標ねじり力を計算する計算ステップと、
前記制御ユニットにより、前記ギヤシフトモータの作動を駆動して、前記シフトドラムの回転を開始させるギヤシフトモータ作動ステップと、
前記制御ユニットにより、前記動力モータを制御して、ねじり力の出力を前記操作ねじり力から前記目標ねじり力となるように変換して、前記ギヤセットに対してギヤシフトを行なう動力変換ステップと、
前記制御ユニットにより、前記動力モータを制御して、前記ねじり力の出力を前記目標ねじり力から前記操作ねじり力に戻るように変換する動力回復ステップと、を含んでいる、ことを特徴とする電気車両の変速システムの制御方法を提供する。
【0010】
また、電気車両の変速制御システムであって、
前記電気車両は、車両を推進する動力を提供するための動力モータを備えており、
前記変速制御システムは、制御ユニットと、アクセルポジションセンサと、変速装置と、を備えており、
前記アクセルポジションセンサは、前記電気車両のアクセル制御の位置を検出してアクセルポジション信号を生成し且つ前記制御ユニットへ送信するためのものであり、
前記変速装置は、前記動力モータと接続されて前記動力モータからの動力を伝達するためのギヤセットと、前記ギヤセットと接続されている作動機構と、前記作動機構と接続されているシフトドラムと、前記シフトドラムと接続されて前記シフトドラムの回転角度を制御して前記作動機構がギヤシフトを行なうことができるように構成されるギヤシフトモータと、を備えており、
前記制御ユニットは、
前記動力モータの回転速度を示す回転速度情報を受信し、
前記回転速度情報に基づいて前記ギヤシフトモータを制御してギヤシフトを行なうか否かを判断し、
前記ギヤシフトモータを制御してギヤシフトを行なうと判断すると、前記回転速度情報と、前記アクセルポジション信号に対応するとともに前記動力モータにより出力されている操作ねじり力とに基づいて、目標ねじり力を計算し、
前記ギヤシフトモータの作動を駆動して、前記シフトドラムの回転を開始させるように構成されている、ことを特徴とする電気車両の変速制御システムを提供する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両
2か月前
個人
授乳用車両
25日前
個人
眼科手術車
1か月前
個人
自動車運転補助装置
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
25日前
日本精機株式会社
表示装置
11日前
日本精機株式会社
表示装置
1か月前
個人
台車用車輪止め具
1か月前
個人
キャンピングトレーラー
1か月前
エムケー精工株式会社
洗車装置
3か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車外表示装置
4か月前
個人
自動車外部装着用しめ飾り
2か月前
個人
謝意シグナル装着車
1か月前
日本精機株式会社
車載表示装置
2か月前
トヨタ自動車株式会社
車両
2か月前
株式会社SUBARU
車両
4か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
株式会社青木製作所
タンクローリ
1か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
トヨタ自動車株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
25日前
日本精機株式会社
車両用表示装置
3か月前
マツダ株式会社
車両
18日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
3か月前
東レ株式会社
車両用部材の補強方法
2か月前
株式会社小糸製作所
投影装置
22日前
ダイハツ工業株式会社
バッグ
3か月前
株式会社コーワ
フィルター清掃装置
3か月前
日本化薬株式会社
ガス発生器
4か月前
豊田合成株式会社
乗員保護装置
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ