TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024082161
公報種別
公開特許公報(A)
公開日
2024-06-19
出願番号
2022195923
出願日
2022-12-07
発明の名称
把持機構及びその把持機構の制御方法
出願人
THKプレシジョン株式会社
代理人
個人
主分類
B25J
15/08 20060101AFI20240612BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】微細な対象物であっても破損させることがなく、把持する際に対象物が移動することがない把持機構の制御方法を提供する。
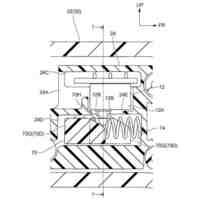
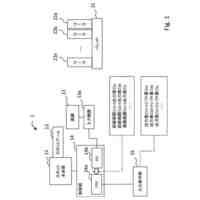
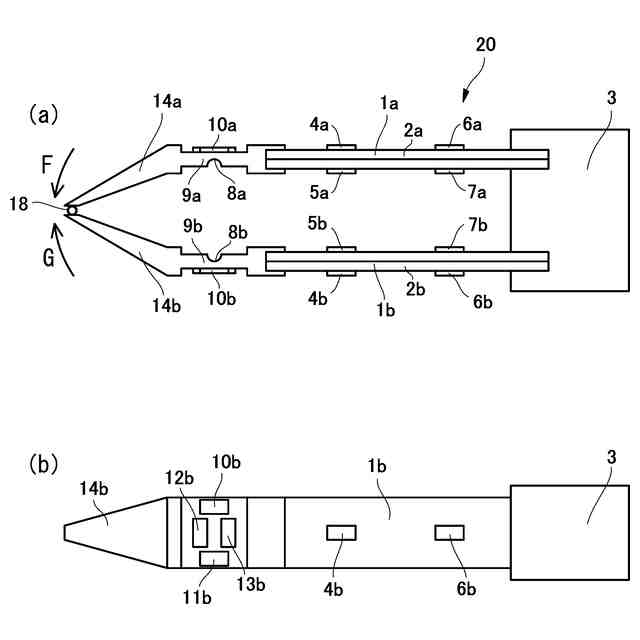
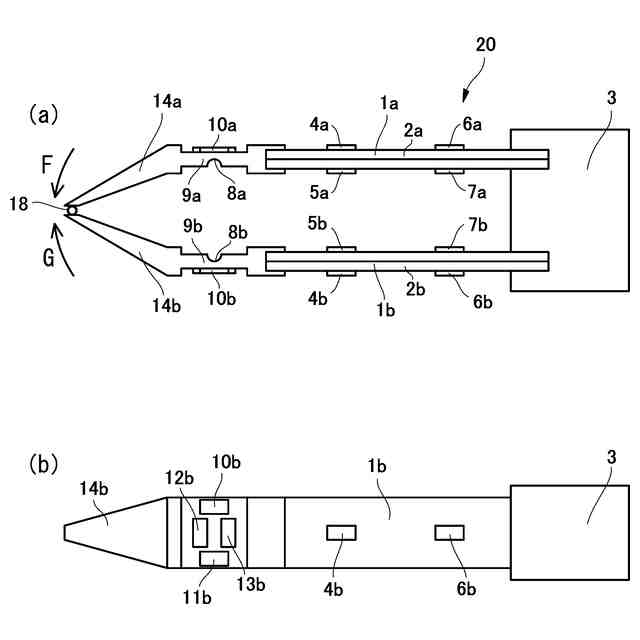
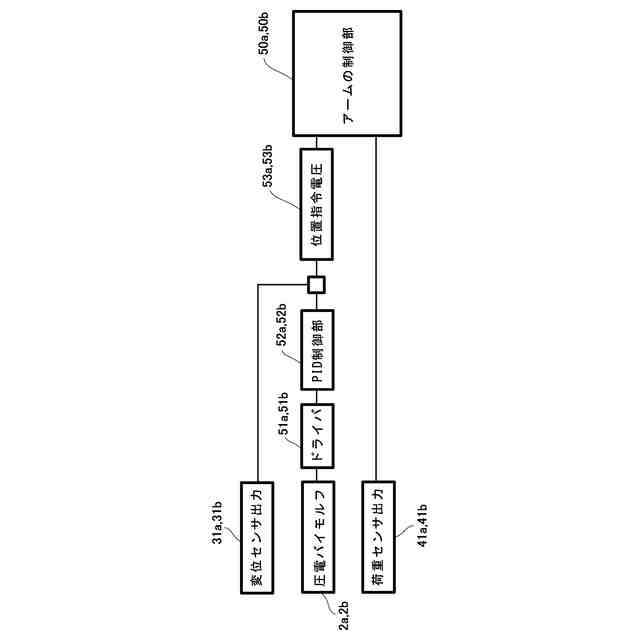
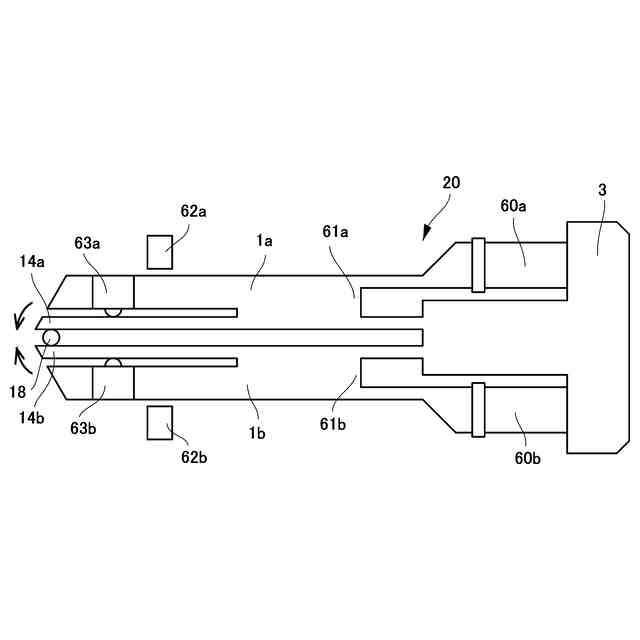
【解決手段】対向する2本のアーム1a,1bの開閉動作によって対象物18を挟む把持機構20であって、それぞれのアームの先端位置に備えられている把持部14a,14bと、それぞれのアームを独立して開閉方向に動かすことができるアームを変位させる手段と、それぞれのアームについてアームの変位量を計測する手段と、それぞれの把持部が対象物に接触したときにそれぞれの把持部にかかる荷重を計測する手段と、を有する把持機構。
【選択図】図1
特許請求の範囲
【請求項1】
対向する2本のアームの開閉動作によって対象物を挟む把持機構であって、それぞれの前記アームの先端位置に備えられている把持部と、それぞれの前記アームを独立して開閉方向に動かすことができるアームを変位させる手段と、それぞれの前記アームについてアームの変位量を計測する手段と、それぞれの前記把持部が対象物に接触したときにそれぞれの前記把持部にかかる荷重を計測する手段と、を有することを特徴とする把持機構。
続きを表示(約 930 文字)
【請求項2】
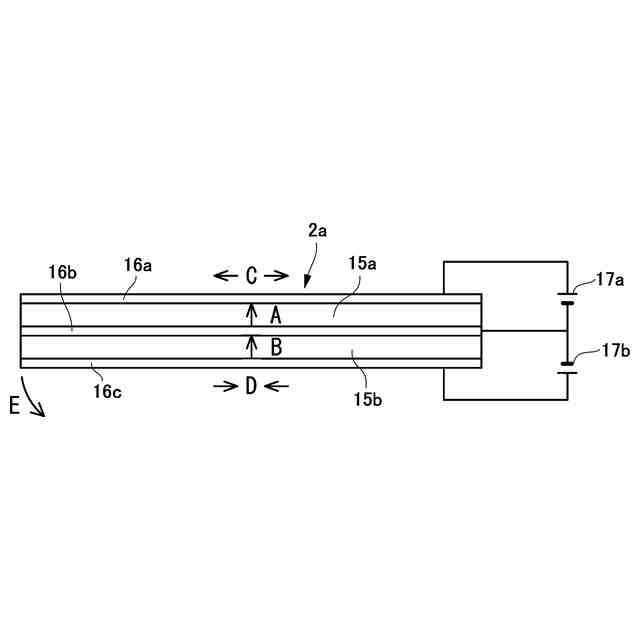
前記アームを変位させる手段として、前記アームの一部に圧電バイモルフを備えていることを特徴とする請求項1に記載の把持機構。
【請求項3】
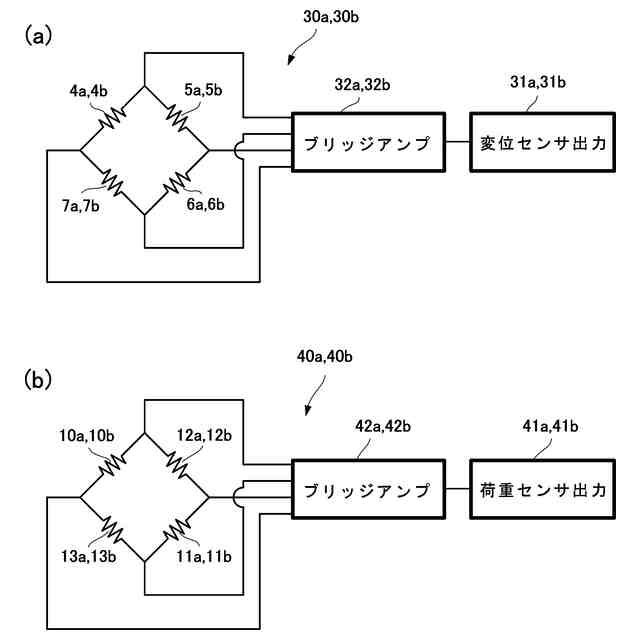
前記アームの変位量を計測する手段が、前記圧電バイモルフに貼付された歪みゲージを有することを特徴とする請求項2に記載の把持機構。
【請求項4】
それぞれの前記アームの一部分が弾性体で形成されており、それぞれの前記荷重を計測する手段が、前記アームの弾性体部分に貼付された歪みゲージを有することを特徴とする請求項1に記載の把持幾構。
【請求項5】
請求項1から4のいずれかに記載の把持機構を用いた把持機構の制御方法であって、
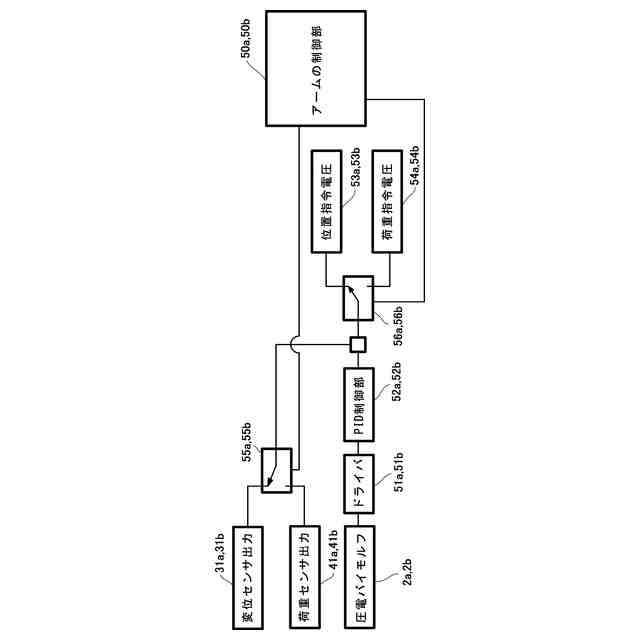
前記アームを変位させる手段によって対象物にそれぞれの前記把持部を近づける工程と、2本の前記アームのうち先に対象物に接触した前記把持部にかかる第1の接触荷重を前記荷重を計測する手段によって計測する工程と、前記第1の接触荷重が所定の値になったときに、対象物に接触している方の前記アームの位置を保持する工程と、後から対象物に接触した前記把持部にかかる第2の接触荷重を前記荷重を計測する手段によって計測する工程と、前記第2の接触荷重が所定の値になったときに、後で対象物に接触した方の前記アームの位置を保持する工程と、それぞれの前記アームを変位させる手段によって2本の前記アームを同時に変位させ、対象物を把持する把持力を前記荷重を計測する手段によって計測する工程と、前記第1の接触荷重と前記第2の接触荷重とを等しく保ちつつ、2本の前記アームを変位させて前記把持力が所定の力になるまで加重する工程と、を有することを特徴とする把持機構の制御方法。
【請求項6】
前記荷重を計測する手段と前記アームを変位させる手段とによって、前記把持部にかかる荷重をフィードバック制御することを特徴とする請求項5に記載の把持機構の制御方法。
【請求項7】
前記アームを変位させる手段と前記アームの変位量を計測する手段とによって、前記アームの変位をフィードバック制御することを特徴とする請求項5に記載の把持機構の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、主に半導体製造分野やバイオテクノロジー分野におけるプローブの接触検出、試料の把持などを行う把持機構及びその把持機構の制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
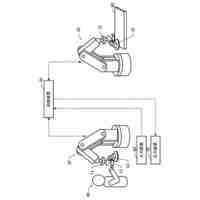
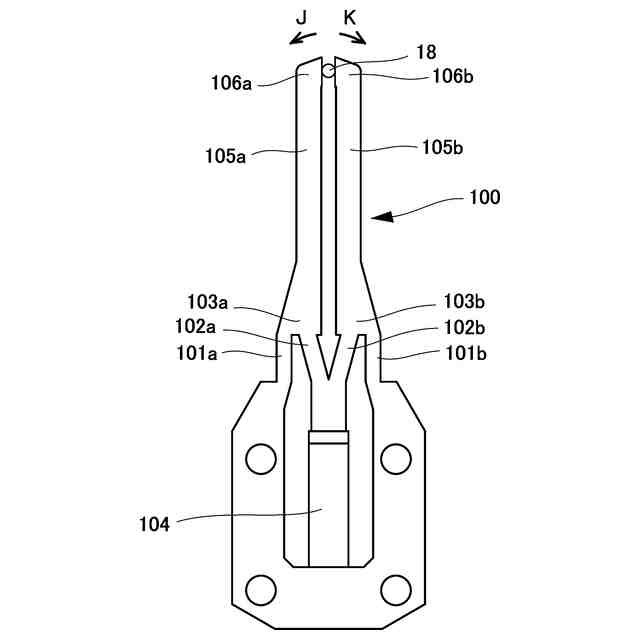
積層型圧電素子に電圧を印加して変位させ、その変位を拡大して対象物を挟持する把持機構は、一般的に用いられている(特許文献1参照)。図8は、従来の把持機構の一例である。従来の把持機構100は拡大機構になっており、一カ所の積層型圧電素子104に電圧を印加すると積層型圧電素子104には十数ミクロンの変位が生じるが、この拡大機構によりアーム105a,105bの先端にある把持部106a,106bでは支点101a,101bを中心に数百ミクロンの回転変位J,Kが得られる。拡大機構の拡大率は支点101a,101bと力点102a,102b、支点101a,101bと作用点103a,103bとの距離の比、またアーム105a,105bの長さによって決定される。そして、積層型圧電素子104に電圧を印加すると把持部106a,106bが開き、把持したい対象物18を把持部106a,106bの間に配置し、積層型圧電アクチュエータ104の印加電圧を取り除くと把持部106a,106bが閉じるため、対象物18を把持することができる。なお、把持力は、アーム105a,105bと対象物18の剛性にほぼ依存する。
【先行技術文献】
【特許文献】
【0003】
特開2010-236974号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
半導体製造やバイオテクノロジーの分野においては、ますます微細化が進んでおり、製造、修理、試験、分析等において微細な対象物を把持する要求が高まっている。
【0005】
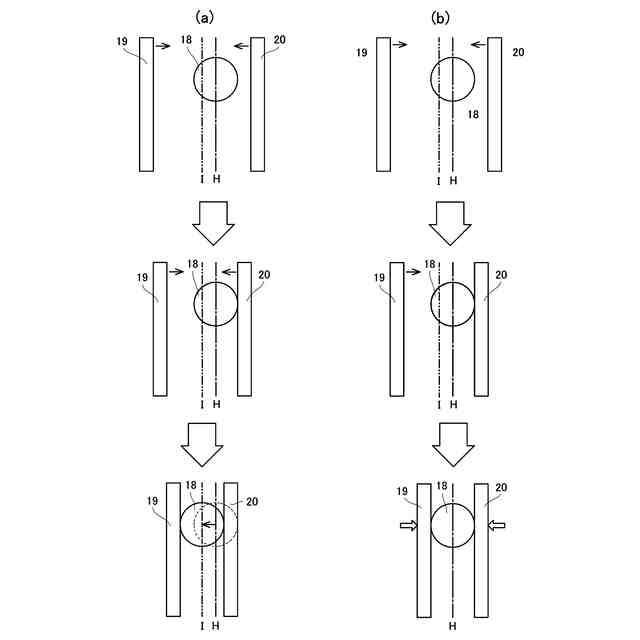
しかし、従来の把持機構では把持力の制御が難しく、微細な対象物を破損させやすいという問題がある。また、微細な対象物は、その確認のために高倍率な顕微鏡下で作業することが多いのだが、顕微鏡の視野は狭く、把持する際に対象物が移動してしまうと、対象物が視野から外れてしまうという問題もある。
【0006】
このような実情に鑑み、本発明は、対象物と把持部の接触荷重を計測し、把持力を制御できる把持機構を提供することを目的とする。そして、把持力を所定の力に設定することにより、対象物を破損せずに把持することができる。また、2本のアームを独立して制御可能なので、把持部が対象物にわずかに接触したあと、2本のアームから対象物に等しい接触荷重を与えることができるため、対象物をほとんど移動させることなく把持することを可能にする把持機構の制御方法も提供する。
【課題を解決するための手段】
【0007】
本発明の把持機構は、対向する2本のアームによって対象物を挟む把持機構であって、それぞれのアームの先端位置に備えられている把持部と、それぞれのアームを独立して開閉方向に動かすことができるアームを変位させる手段と、それぞれのアームについてアームの変位量を計測する手段と、それぞれの把持部が対象物に接触したときにそれぞれの把持部にかかる荷重を計測する手段と、を有することとする。
【0008】
ここで、前記アームを変位させる手段として、アームの一部に圧電バイモルフを備えていることにしたり、前記アームの変位量を計測する手段が、圧電バイモルフに貼付された歪みゲージを有することにしたりしてもよい。
【0009】
さらに、それぞれのアームの一部分が弾性体で形成されており、それぞれの前記荷重を計測する手段が、アームの弾性体部分に貼付された歪みゲージを有することにしてもよい。
【0010】
また、上記の把持機構を用いた把持機構の制御方法であって、前記アームを変位させる手段によって対象物にそれぞれの把持部を近づける工程と、2本のアームのうち先に対象物に接触した把持部にかかる第1の接触荷重を前記荷重を計測する手段によって計測する工程と、第1の接触荷重が所定の値になったときに、対象物に接触している方のアームの位置を保持する工程と、後から対象物に接触した把持部にかかる第2の接触荷重を前記荷重を計測する手段によって計測する工程と、第2の接触荷重が所定の値になったときに、後で対象物に接触した方のアームの位置を保持する工程と、それぞれの前記アームを変位させる手段によって2本のアームを同時に変位させ、対象物を把持する把持力を前記荷重を計測する手段によって計測する工程と、第1の接触荷重と第2の接触荷重とを等しく保ちつつ、2本のアームを変位させて把持力が所定の力になるまで加重する工程と、を有する把持機構の制御方法にするとよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
3か月前
株式会社右川ゴム製造所
把持装置
3か月前
日東工器株式会社
衝撃工具
8日前
学校法人立命館
グリッパ
3か月前
川崎重工業株式会社
罫書用治具
25日前
株式会社マキタ
動力工具
1か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
トヨタ自動車株式会社
ハンド構造
15日前
個人
プーリーキー抜き治具
3か月前
CKD株式会社
電動把持装置
2か月前
東京都公立大学法人
ロボットハンド
1か月前
宮川工機株式会社
板状部品移動装置
1か月前
国立大学法人山形大学
二重関節機構
1か月前
工機ホールディングス株式会社
作業機
24日前
マックス株式会社
打ち込み工具
1日前
株式会社共和製作所
ロボット用アーム
2か月前
個人
スロープバリビス-ビス&-ドライバー
1か月前
株式会社ダイヘン
情報処理装置
3か月前
株式会社ダイヘン
画像生成装置
3か月前
マックス株式会社
打ち込み工具
1日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
株式会社ダイヘン
画像生成装置
3か月前
西部電機株式会社
吸着装置
2か月前
オークマ株式会社
ロボット用架台
1か月前
ミネベアミツミ株式会社
把持装置
1か月前
トヨタ自動車株式会社
ロボットシステム
2日前
ミネベアミツミ株式会社
把持装置
29日前
株式会社アイエイアイ
グリッパー
1日前
西部電機株式会社
吸着装置
2か月前
株式会社マキタ
電動工具
3か月前
住友重機械工業株式会社
遠隔操作ロボット
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ