TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024071178
公報種別
公開特許公報(A)
公開日
2024-05-24
出願番号
2022181994
出願日
2022-11-14
発明の名称
把持装置
出願人
ミネベアミツミ株式会社
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20240517BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】直動ガイドを小型化する技術を提供する。
【解決手段】第1爪部と第2爪部との間の第1方向に沿う距離を変更することにより把持対象物を把持する把持装置であって、前記第1方向と交差する第2方向に延びる回転軸を中心に回転するピニオンと、第1ガイド部材と、前記第1ガイド部材から前記第1方向に離れて設けられる第2ガイド部材と、前記第1爪部と連動して前記第1方向に移動する第1移動部と、を備え、前記第1移動部は、前記第1方向及び前記第2方向に延びる板状の形状を有する第1縦板部を有し、前記第1縦板部は、前記第1ガイド部材が、前記第1方向に沿って相対的に移動可能に挿入される第1挿入部と、前記第2ガイド部材が、前記第1方向に沿って相対的に移動可能に挿入される第2挿入部と、前記第1挿入部と前記第2挿入部との間に設けられ、前記ピニオンとかみあわされるラックと、を有する把持装置。
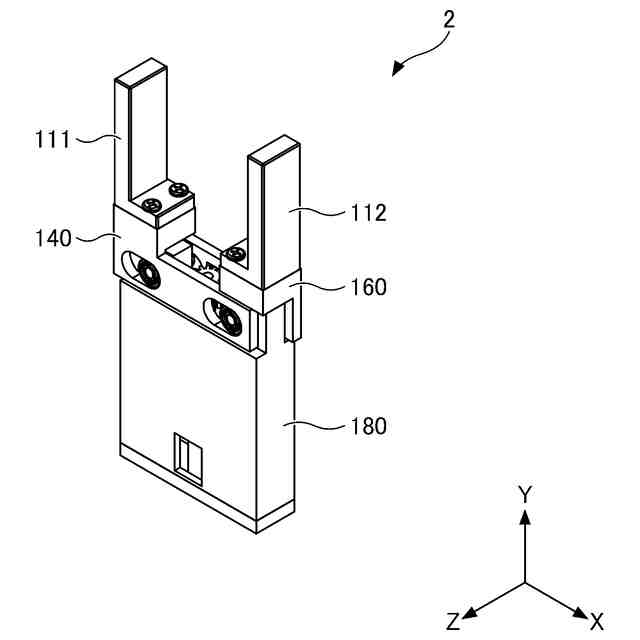
【選択図】図1
特許請求の範囲
【請求項1】
第1爪部と第2爪部との間の第1方向に沿う距離を変更することにより把持対象物を把持する把持装置であって、
前記第1方向と交差する第2方向に延びる回転軸を中心に回転するピニオンと、
第1ガイド部材と、
前記第1ガイド部材から前記第1方向に離れて設けられる第2ガイド部材と、
前記第1爪部と連動して前記第1方向に移動する第1移動部と、
を備え、
前記第1移動部は、前記第1方向及び前記第2方向に延びる板状の形状を有する第1縦板部を有し、
前記第1縦板部は、
前記第1ガイド部材が、前記第1方向に沿って相対的に移動可能に挿入される第1挿入部と、
前記第2ガイド部材が、前記第1方向に沿って相対的に移動可能に挿入される第2挿入部と、
前記第1挿入部と前記第2挿入部との間に設けられ、前記ピニオンとかみあわされるラックと、を有する、
把持装置。
続きを表示(約 1,600 文字)
【請求項2】
前記第1ガイド部材は、前記第1方向及び前記第2方向に交差する第3方向に延びる第1シャフト周りに回転する第1ベアリングであり、
前記第2ガイド部材は、前記第3方向に延びる第2シャフト周りに回転する第2ベアリングである、
請求項1に記載の把持装置。
【請求項3】
前記第1ベアリング及び前記第2ベアリングのそれぞれは、円筒形の外形を有する本体部と、前記本体部の端部に設けられる前記本体部より径の大きいフランジ部と、を有するフランジ付きベアリングであって、
前記第1挿入部は、前記第1ベアリングにおける前記本体部が挿入される第1貫通孔と、前記第1ベアリングにおける前記フランジ部が挿入される第1凹部と、を有し、
前記第2挿入部は、前記第2ベアリングにおける前記本体部が挿入される第2貫通孔と、前記第2ベアリングにおける前記フランジ部が挿入される第2凹部と、を有する、
請求項2に記載の把持装置。
【請求項4】
前記第1凹部の底面と、前記第1ベアリングにおける前記フランジ部との間に、摩擦を軽減する第1減摩部材を備え、
前記第2凹部の底面と、前記第2ベアリングにおける前記フランジ部との間に、摩擦を軽減する第2減摩部材を備える、
請求項3に記載の把持装置。
【請求項5】
前記第2方向に沿って延びる第3シャフト周りに回転する第3ベアリングを更に有し、
前記第1移動部は、前記第1縦板部の端部から前記第1方向及び前記第3方向に延びる第1横板部を有し、
前記第1横板部は、前記第3ベアリングが前記第1方向に沿って相対的に移動可能に挿入される第3挿入部を有する、
請求項2に記載の把持装置。
【請求項6】
前記第1挿入部は、前記第1ベアリングが挿入される第1貫通孔を有し、
前記第2挿入部は、前記第2ベアリングが挿入される第2貫通孔を有し、
前記第3挿入部は、前記第3ベアリングが挿入される第3貫通孔を有する、
請求項5に記載の把持装置。
【請求項7】
前記第2方向に沿って延びる第3シャフト周りに回転する第3ベアリングと、
前記第2方向に沿って延びる第4シャフト周りに回転し、第3ベアリングに対して、前記第1方向に離れて設けられる第4ベアリングと、
を更に有し、
前記第1移動部は、前記第1縦板部の端部から前記第1方向及び前記第3方向に延びる第1横板部及び第2横板部を有し、
前記第1横板部は、前記第3ベアリングが前記第1方向に沿って相対的に移動可能に挿入される第3挿入部を有し、
前記第2横板部は、前記第4ベアリングが前記第1方向に沿って相対的に移動可能に挿入される第4挿入部を有する、
請求項2に記載の把持装置。
【請求項8】
前記第1挿入部は、前記第1ベアリングが挿入される第1貫通孔を有し、
前記第2挿入部は、前記第2ベアリングが挿入される第2貫通孔を有し、
前記第3挿入部は、前記第3ベアリングが挿入される第3貫通孔を有し、
前記第4挿入部は、前記第4ベアリングが挿入される第4貫通孔を有する、
請求項7に記載の把持装置。
【請求項9】
筐体を更に備え、
前記筐体は、前記第1シャフトが固定される第1凸部と、前記第2シャフトが固定される第2凸部と、を備える、
請求項2から請求項8のいずれか一項に記載の把持装置。
【請求項10】
前記第1移動部は、焼結金属により一体に形成される、
請求項9に記載の把持装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、把持装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、脱炭素化の影響で省エネ、脱エアへの要求が高まりつつある。空気式把持装置では不可能な精密把持や省スペース化を要求される工程があることから、空気式把持装置に置き換わる安価で小型な電動把持装置(電動グリッパ)が求められている。
【0003】
特許文献1には、接続ピンを、一対のツメから成る開閉可能なハンドにより挟持して挿抜する接続ピン挿抜機構が開示されている。特許文献1には、ハンドの一方のツメに係合した第1のラックと、ハンドの他方のツメに係合した第2のラックと、第1のラックおよび第2のラックと歯合するピニオンと、ピニオンを駆動する駆動手段とから成るハンド開閉機構が開示されている。特許文献1には、ハンド開閉機構が、ピニオンを正逆方向へ回転させることにより、ハンドの開閉を行うことが開示されている。
【0004】
特許文献2には、回転力を発生させる駆動部と、回転力を伝達される減速機と、減速機の回転運動を直線運動に変換する変換部とを有する把持装置が開示されている。特許文献2には、変換部が、ラック、ピニオン及びリニアガイドを有することが開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2000-023203号公報
特開2021-183360号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
把持装置において、対象物を把持する一対の爪部を直線運動させるための直動ガイドを小型化することが求められている。
【0007】
本開示は、直動ガイドを小型化する技術を提供する。
【課題を解決するための手段】
【0008】
本開示の一態様では、第1爪部と第2爪部との間の第1方向に沿う距離を変更することにより把持対象物を把持する把持装置であって、前記第1方向と交差する第2方向に延びる回転軸を中心に回転するピニオンと、第1ガイド部材と、前記第1ガイド部材から前記第1方向に離れて設けられる第2ガイド部材と、前記第1爪部と連動して前記第1方向に移動する第1移動部と、を備え、前記第1移動部は、前記第1方向及び前記第2方向に延びる板状の形状を有する第1縦板部を有し、前記第1縦板部は、前記第1ガイド部材が、前記第1方向に沿って相対的に移動可能に挿入される第1挿入部と、前記第2ガイド部材が、前記第1方向に沿って相対的に移動可能に挿入される第2挿入部と、前記第1挿入部と前記第2挿入部との間に設けられ、前記ピニオンとかみあわされるラックと、を有する把持装置が提供される。
【発明の効果】
【0009】
本開示の把持装置によれば、直動ガイドを小型化できる。
【図面の簡単な説明】
【0010】
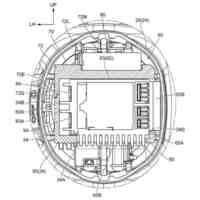
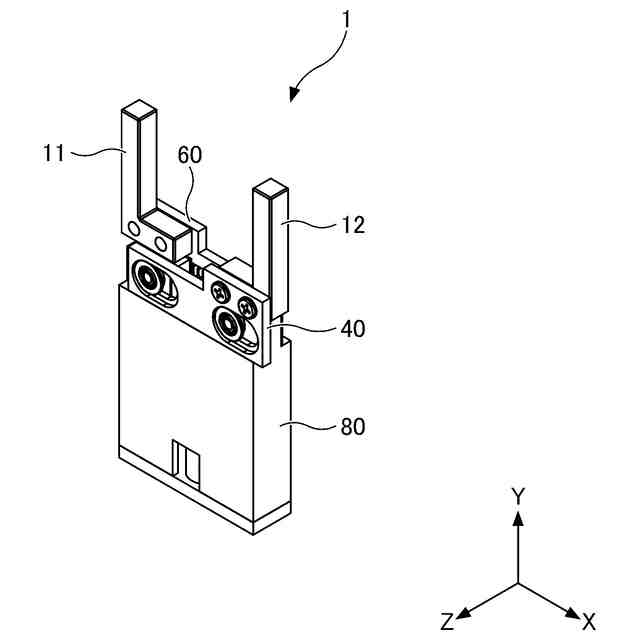
図1は、第1実施形態に係る把持装置の斜視図である。
図2は、第1実施形態に係る把持装置の分解斜視図である。
図3は、第1実施形態に係る把持装置が備える移動部の斜視図である。
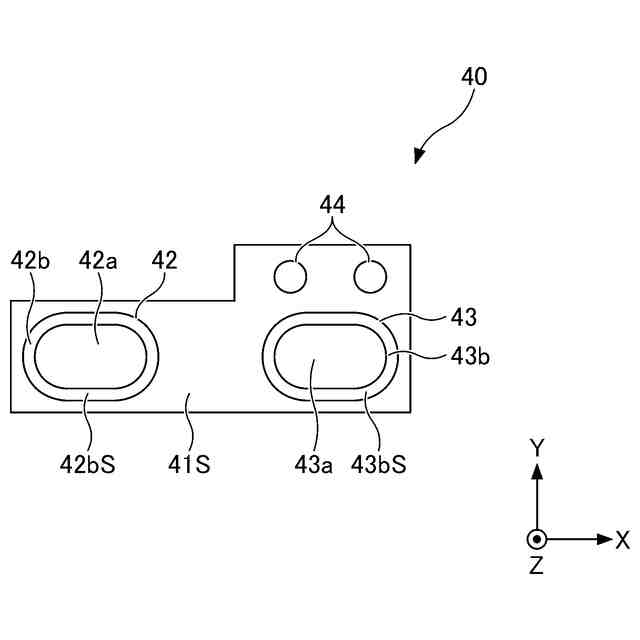
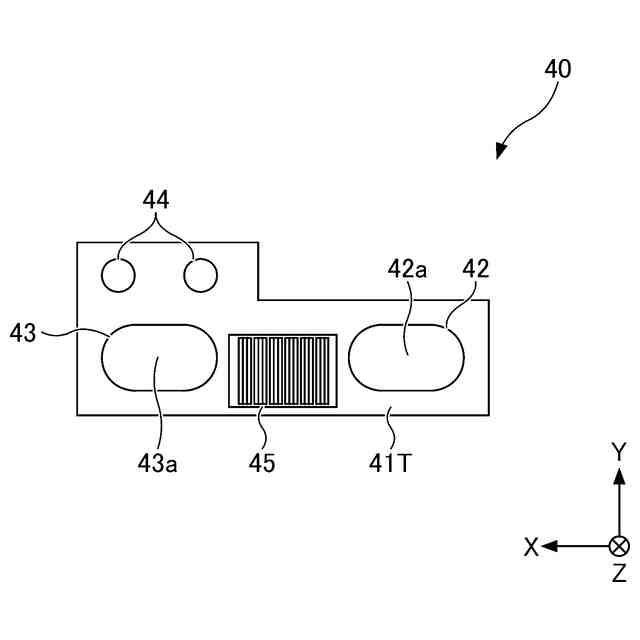
図4は、第1実施形態に係る把持装置が備える移動部の正面図である。
図5は、第1実施形態に係る把持装置が備える移動部の背面図である。
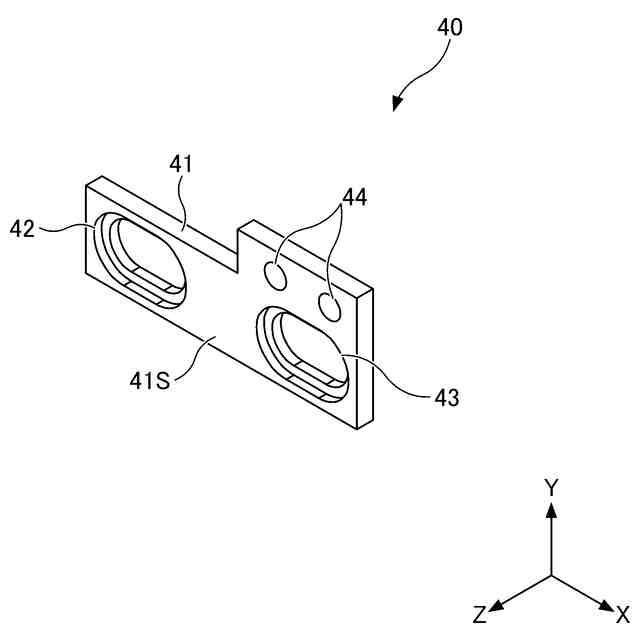
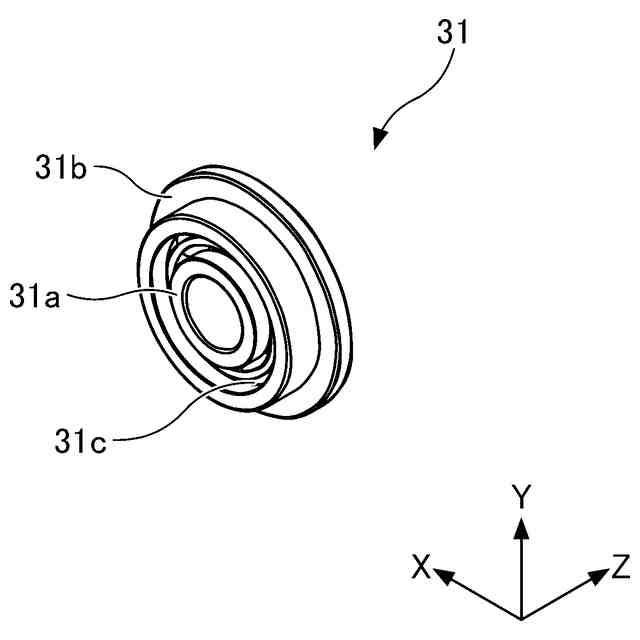
図6は、第1実施形態に係る把持装置が備えるベアリングの斜視図である。
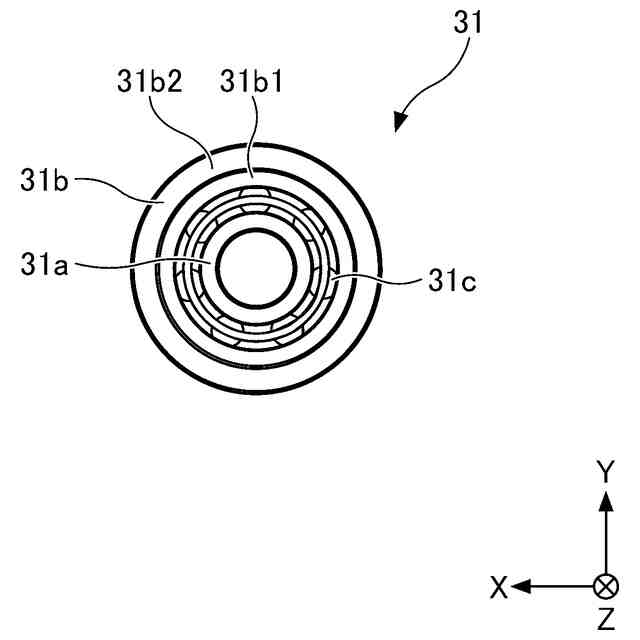
図7は、第1実施形態に係る把持装置が備えるベアリングの側面図である。
図8は、第1実施形態に係る把持装置が備えるベアリングの背面図である。
図9は、第2実施形態に係る把持装置の斜視図である。
図10は、第2実施形態に係る把持装置の分解斜視図である。
図11は、第2実施形態に係る把持装置が備える移動部の斜視図である。
図12は、第2実施形態に係る把持装置が備える移動部の背面図である。
図13は、第2実施形態に係る把持装置が備える移動部の上面図である。
図14は、第3実施形態に係る把持装置の斜視図である。
図15は、第3実施形態に係る把持装置の分解斜視図である。
図16は、第3実施形態に係る把持装置が備える移動部の斜視図である。
図17は、第3実施形態に係る把持装置が備える移動部の背面図である。
図18は、第3実施形態に係る把持装置が備える移動部の上面図である。
図19は、第4実施形態に係る把持装置が備えるピンの斜視図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
UTM株式会社
搬送装置
7か月前
個人
ペットボトル用蓋開け具。
8か月前
株式会社ツノダ
挟持工具
3か月前
日東工器株式会社
衝撃工具
10日前
株式会社右川ゴム製造所
把持装置
3か月前
川崎重工業株式会社
ハンド
4か月前
個人
ロボットシステム
6か月前
川崎重工業株式会社
罫書用治具
27日前
トヨタ自動車株式会社
関節機構
6か月前
トヨタ自動車株式会社
関節機構
7か月前
株式会社マキタ
動力工具
1か月前
学校法人立命館
グリッパ
3か月前
株式会社不二越
ロボット
6か月前
株式会社不二越
ロボット
8か月前
学校法人立命館
ロボットハンド
4か月前
株式会社ダイヘン
搬送装置
1か月前
個人
作業台
7か月前
株式会社ダイヘン
搬送装置
1か月前
トヨタ自動車株式会社
ハンド構造
17日前
個人
プーリーキー抜き治具
3か月前
東京都公立大学法人
ロボットハンド
2か月前
国立大学法人山形大学
二重関節機構
1か月前
CKD株式会社
電動把持装置
2か月前
株式会社不二越
予測システム
4か月前
宮川工機株式会社
板状部品移動装置
1か月前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
4か月前
国立大学法人東北大学
剛性可変連結体
7か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ