TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024081474
公報種別
公開特許公報(A)
公開日
2024-06-18
出願番号
2022195126
出願日
2022-12-06
発明の名称
ロボットを用いた生産システム
出願人
愛三工業株式会社
代理人
弁理士法人 快友国際特許事務所
主分類
B25J
13/00 20060101AFI20240611BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】従来よりも製品の生産効率が改善された生産システムを提供する。
【解決手段】
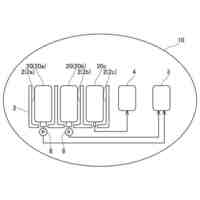
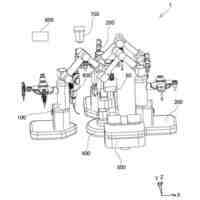
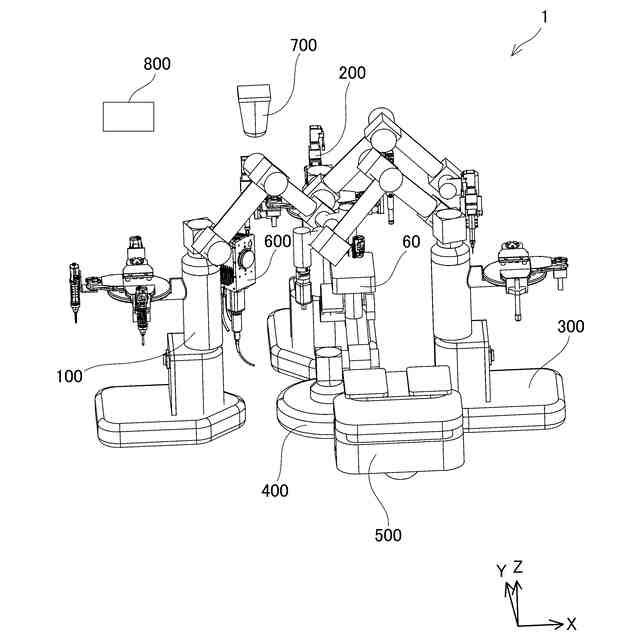
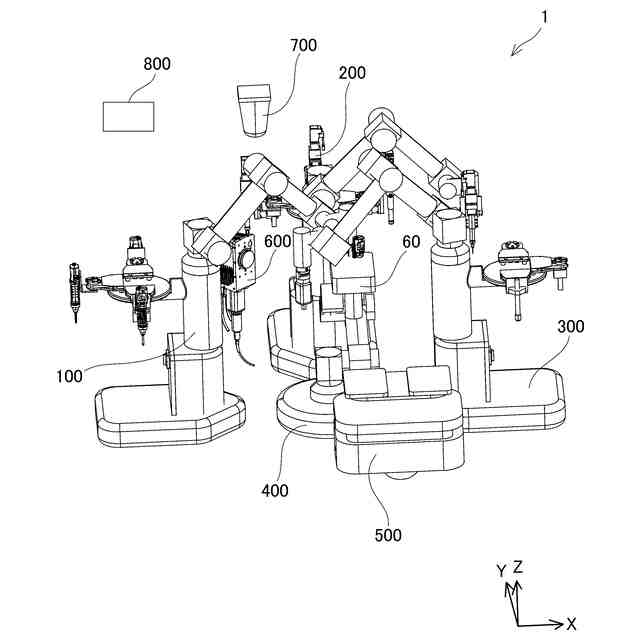
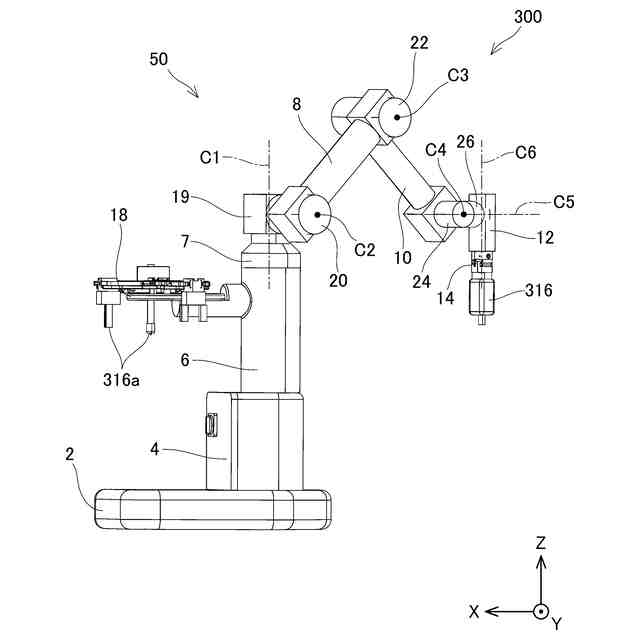
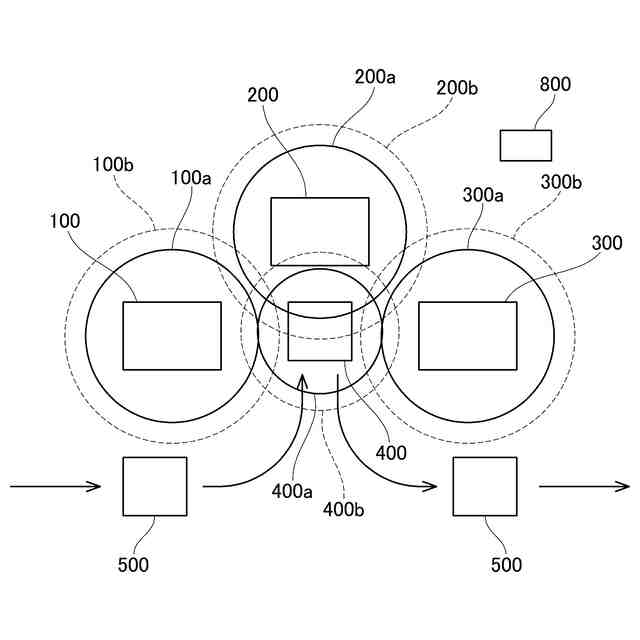
生産システムは、生産で用いる部品を、その部品の位置を変化させることが可能な状態で把持する第1ロボットと、把持された部品に把持された部品とは異なる部品を組付けること、把持された部品に固定具を締付けること、把持された部品に塗布すること、把持された部品の加工を行うこと、はんだ付け、溶接、の少なくとも一つを行う第2ロボットと、第1ロボット及び第2ロボットの駆動を制御するコントローラを備えている。また、この生産システムでは、コントローラが、第1ロボット及び第2ロボットを協調制御する。
【選択図】 図1
特許請求の範囲
【請求項1】
生産で用いる部品を、その部品の位置を変化させることが可能な状態で把持する第1ロボットと、
把持された部品に把持された部品とは異なる部品を組付けること、把持された部品に固定具を締付けること、把持された部品に塗布すること、把持された部品の加工を行うこと、はんだ付け、溶接、の少なくとも一つを行う第2ロボットと、
第1ロボット及び第2ロボットの駆動を制御するコントローラと、を備え、
前記コントローラが、第1ロボット及び第2ロボットを協調制御する生産システム。
続きを表示(約 810 文字)
【請求項2】
請求項1に記載の生産システムであって、
第1ロボットと第2ロボットが、別体のロボットである、生産システム。
【請求項3】
請求項1又は2に記載の生産システムであって、
前記コントローラは、
第1ロボット及び第2ロボットが駆動可能な駆動空間よりも外側に作業空間を設定し、
作業空間に人が侵入したときに第1ロボット及び第2ロボットの動作を減速又は停止させる、生産システム。
【請求項4】
請求項1又は2に記載の生産システムであって、
さらに、生産した製品の品質管理を行う品質管理機器を備え、
前記コントローラは、品質管理機器も協調制御する、生産システム。
【請求項5】
請求項1又は2に記載の生産システムであって、
さらに、物品を運搬可能な運搬ロボットを備え、
前記コントローラは、運搬ロボットを協調制御し、第1ロボットと第2ロボットの少なくとも一方に生産に必要な部品を運搬する、生産システム。
【請求項6】
請求項5に記載の生産システムであって、
前記コントローラは、製品の生産管理情報に基づいて、運搬ロボットに運搬させる部品の種類を決定する、生産システム。
【請求項7】
請求項1又は2に記載の生産システムであって、
さらに、物品を運搬可能な運搬ロボットを備え、
前記コントローラは、運搬ロボットを協調制御し、生産された製品を完成品ストックに運搬する、生産システム。
【請求項8】
請求項1又は2に記載の生産システムであって、
第1ロボットは、第2ロボットに向けて生産に必要な部品を運搬する機能と、第2ロボットによって生産された製品を完成品ストックに運搬する機能の少なくとも一方の機能を有する、生産システム。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、ロボットを用いた生産システムに関する技術を開示する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1に、作業台に配置された部品(ワーク)に、組付作業を行う2つのロボットを用いて製品を生産するロボット装置が開示されている。特許文献1では、コントローラを用い、2つのロボットのうちの1つのロボットを駆動する第1制御と、2つのロボットを同時に駆動する第2制御(協調制御)を切り換え、製品の生産効率を向上させている。
【先行技術文献】
【特許文献】
【0003】
国際公開2019/142583号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のように、組付作業を行う2つのロボットを協調制御すれば、製品の生産効率は向上する。しかしながら、1つの製品を完成させるためには、1つの部品(ワーク)に対して種々の作業工程が必要であることが多く、また、1つの部品の種々の位置に対して作業を行うことが必要であることも多い。そのため、特許文献1の生産システムでは、作業工程毎、あるいは、部品に対する作業位置毎に、1つの部品を異なる作業環境(異なるロボット装置)に移動させることが必要となる。よって、ロボットを用いて製品を生産する分野では、生産システムのさらなる改善が必要とされている。本明細書は、従来よりも製品の生産効率が改善された生産システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
本明細書で開示する第1技術は、ロボットを用いた生産システムである。この生産システムは、生産で用いる部品を、その部品の位置を変化させることが可能な状態で把持する第1ロボットと、把持された部品に把持された部品とは異なる部品を組付けること、把持された部品に固定具を締付けること、把持された部品に塗布すること、把持された部品の加工を行うこと、はんだ付け、溶接、の少なくとも一つを行う第2ロボットと、第1ロボット及び第2ロボットの駆動を制御するコントローラを備えていてよい。また、この生産システムでは、コントローラが、第1ロボット及び第2ロボットを協調制御してよい。
【0006】
本明細書で開示する第2技術は、上記第1技術の生産システムであって、第1ロボットと第2ロボットが、別体のロボットであってよい。
【0007】
本明細書で開示する第3技術は、上記第1または第2技術の生産システムであって、コントローラは、第1ロボット及び第2ロボットが駆動可能な駆動空間よりも外側に作業空間を設定し、作業空間に人が侵入したときに第1ロボット及び第2ロボットの動作を減速又は停止させてよい。
【0008】
本明細書で開示する第4技術は、上記第1から第3技術のいずれかの生産システムであって、さらに、生産した製品の品質管理を行う品質管理機器を備え、コントローラは、品質管理機器も協調制御してよい。
【0009】
本明細書で開示する第5技術は、上記第1から第4技術のいずれかの生産システムであって、さらに、物品を運搬可能な運搬ロボットを備え、コントローラは、運搬ロボットを協調制御し、第1ロボットと第2ロボットの少なくとも一方に生産に必要な部品を運搬してよい。
【0010】
本明細書で開示する第6技術は、上記第5技術の生産システムであって、コントローラは、製品の生産管理情報に基づいて、運搬ロボットに運搬させる部品の種類を決定してよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
愛三工業株式会社
車両
13日前
愛三工業株式会社
加熱装置
13日前
愛三工業株式会社
エゼクタ
15日前
愛三工業株式会社
波浪抑制システム
1日前
愛三工業株式会社
エンジンシステム
5日前
愛三工業株式会社
波浪抑制システム
5日前
愛三工業株式会社
浮体の漏れ検出装置
5日前
愛三工業株式会社
ロボットを用いた生産システム
14日前
愛三工業株式会社
樹脂製弁装置及びその製造方法
21日前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
3か月前
株式会社ツノダ
挟持工具
4か月前
川崎重工業株式会社
ハンド
4か月前
日東工器株式会社
衝撃工具
5日前
株式会社右川ゴム製造所
把持装置
3か月前
川崎重工業株式会社
罫書用治具
22日前
学校法人立命館
グリッパ
3か月前
学校法人立命館
ロボットハンド
3か月前
株式会社マキタ
動力工具
1か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
個人
プーリーキー抜き治具
3か月前
トヨタ自動車株式会社
ハンド構造
12日前
CKD株式会社
電動把持装置
2か月前
国立大学法人山形大学
二重関節機構
1か月前
東京都公立大学法人
ロボットハンド
1か月前
株式会社不二越
予測システム
4か月前
宮川工機株式会社
板状部品移動装置
1か月前
株式会社ダイヘン
画像生成装置
3か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
21日前
株式会社中村製作所
トルクドライバー
3か月前
工機ホールディングス株式会社
作業機
21日前
個人
スロープバリビス-ビス&-ドライバー
1か月前
株式会社ダイヘン
画像生成装置
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ