TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024079428
公報種別
公開特許公報(A)
公開日
2024-06-11
出願番号
2022192381
出願日
2022-11-30
発明の名称
遠隔装填システム、制御装置、遠隔装填方法、及びプログラム
出願人
株式会社大林組
,
個人
代理人
個人
,
個人
主分類
F42D
1/08 20060101AFI20240604BHJP(弾薬;爆破)
要約
【課題】作業者の安全を確保しつつ、より適切に爆薬等の装填を行う。
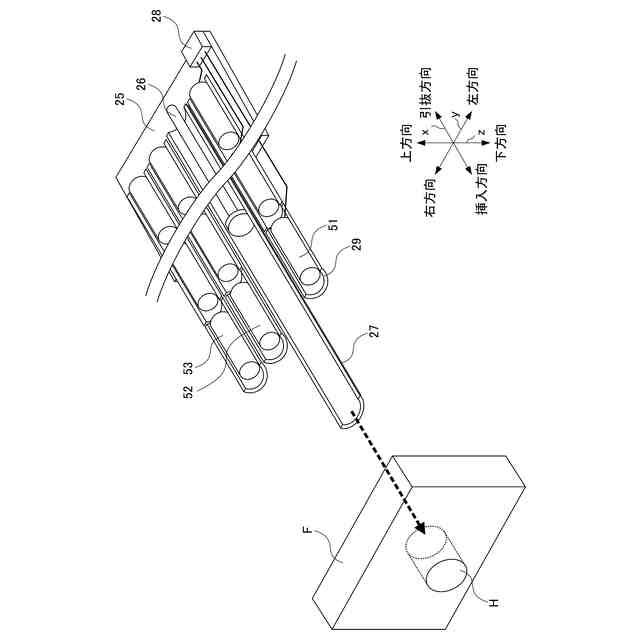
【解決手段】遠隔装填システムは、ガイド部材27と、親ダイ51、増ダイ、及び餡子の少なくとも何れかである挿入対象物を、装薬孔Hに向かって案内する。挿入機構26及び位置合わせ機構は、挿入対象物を、ガイド部材27を介して装薬孔Hに装填するために駆動する。第1操作機構及び第2操作機構は、ユーザからの挿入機構26及び位置合わせ機構に対する遠隔操作を受け付ける。動作制御部は、第1操作機構及び第2操作機構に入力されたユーザからの挿入機構26及び位置合わせ機構に対する遠隔操作に応じて、挿入機構26の動作を制御すると共に、挿入機構26及び位置合わせ機構に加わる力を、第1操作機構及び第2操作機構がユーザに対して伝達する動作を制御する。
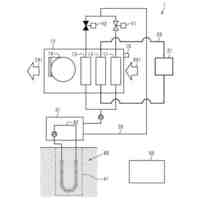
【選択図】図3
特許請求の範囲
【請求項1】
爆薬及び込め物の少なくとも何れかである挿入対象物を、装薬孔に向かって案内するガイド部材と、
前記挿入対象物を、前記ガイド部材を介して前記装薬孔に装填するために駆動する駆動機構と、
ユーザからの前記駆動機構に対する遠隔操作を受け付ける操作機構と、
前記操作機構に入力された前記ユーザからの前記駆動機構に対する遠隔操作に応じて、前記駆動機構の動作を制御すると共に、前記駆動機構に加わる力を、前記操作機構が前記ユーザに対して伝達する動作を制御する動作制御手段と、
を備えることを特徴とする遠隔装填システム。
続きを表示(約 2,000 文字)
【請求項2】
前記駆動機構として、前記挿入対象物を、前記ガイド部材を介して前記装薬孔に挿入する挿入機構を少なくとも備え、
前記操作機構は、ユーザからの前記挿入機構に対する遠隔操作を受け付け、
前記動作制御手段は、前記操作機構に入力された前記ユーザからの前記挿入機構に対する遠隔操作に応じて、前記挿入機構が前記挿入対象物を前記装薬孔に挿入する動作を制御すると共に、前記挿入機構に加わる力を、前記操作機構が前記ユーザに対して伝達する動作を制御する、
を備えることを特徴とする請求項1に記載の遠隔装填システム。
【請求項3】
前記駆動機構として、前記ガイド部材における前記挿入対象物の排出部分と、前記装薬孔との位置を合わせる位置合わせ機構を少なくとも備え、
前記操作機構は、前記ユーザからの前記位置合わせ機構に対する遠隔操作を受け付け、
前記動作制御手段は、前記操作機構に入力された前記ユーザからの前記位置合わせ機構に対する遠隔操作に応じて、前記位置合わせ機構が位置を合わせる動作を制御すると共に、前記位置合わせ機構に加わる力を、前記操作機構が前記ユーザに対して伝達する動作をさらに制御する、
ことを特徴とする請求項1又は2に記載の遠隔装填システム。
【請求項4】
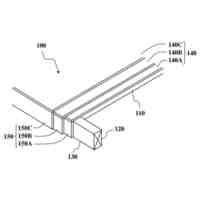
前記ガイド部材は、長手方向の両端が開口すると共に、長手方向に対し垂直な断面である横断面の形状が円形状又は円弧形状であり、
前記挿入機構は、前記ガイド部材の長手方向の一端の開口から、前記装薬孔に挿入又は接触している他端の開口に向かって、前記挿入対象物を棒状の部材もしくは筒状の部材で押し出すことで前記挿入対象物を前記装薬孔に挿入する、
ことを特徴とする請求項2に記載の遠隔装填システム。
【請求項5】
前記動作制御手段は、前記挿入機構に加わる力として、前記挿入機構及び前記挿入対象物と、前記装薬孔との摩擦により生じる反力を、前記操作機構が前記ユーザに対して伝達する動作を制御する、
ことを特徴とする請求項2又は4に記載の遠隔装填システム。
【請求項6】
前記動作制御手段は、前記挿入機構に加わる力として、前記挿入対象物と、前記装薬孔の内部における前記挿入対象物が挿入される端部とは逆の奥側の端部との接触により生じる反力を、前記操作機構が前記ユーザに対して伝達する動作を制御する、
ことを特徴とする請求項2又は4に記載の遠隔装填システム。
【請求項7】
前記挿入機構が第1挿入対象物を前記装薬孔に挿入する動作を行った後に、前記ガイド部材に第2挿入対象物を新たに配置する配置機構をさらに備え、
前記動作制御手段は、前記挿入機構が前記第2挿入対象物を、前記第1挿入対象物を挿入した装薬孔に挿入した後に、さらに連続して挿入する動作を制御する、
ことを特徴とする請求項2又は4に記載の遠隔装填システム。
【請求項8】
前記挿入対象物である爆薬を起爆するための脚線を結束した状態で保持する脚線機構をさらに備え、
前記脚線機構は、前記挿入機構が挿入対象物である前記爆薬を前記装薬孔に挿入することに伴い、前記脚線の結束を解放しながら脚線を送り出すことで、結束から解放された脚線の少なくとも一部が前記装薬孔の外部に露出するようにする、
ことを特徴とする請求項2又は4に記載の遠隔装填システム。
【請求項9】
前記駆動の位置に関する第1位置データと、前記操作機構の位置に関する第2位置データと、を取得するデータ取得手段をさらに備え、
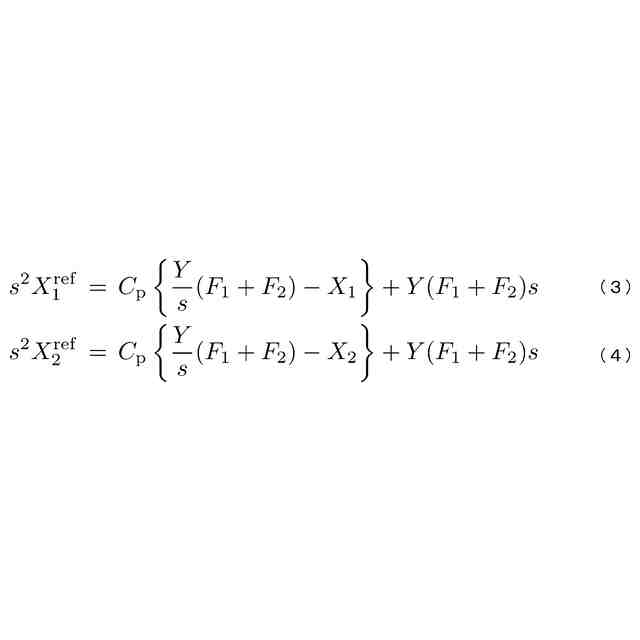
前記動作制御手段は、前記第1位置データと、前記駆動機構の基準となる前記第2位置データとに基づいて、前記第2位置データが表す動作に対応する位置及び力を出力するように前記駆動機構を制御する一方で、前記第2位置データと、前記操作機構の動作の基準となる前記第1位置データとに基づいて、前記第1位置データが表す動作に対応する位置及び力を出力するように前記操作機構を制御することで、前記動作の制御を実現する、
ことを特徴とする請求項1又は2に記載の遠隔装填システム。
【請求項10】
前記駆動機構の動作を表す物理量のデータと、前記操作機構の可動部の動作を表す物理量のデータと、を取得するデータ取得手段をさらに備え、
前記動作制御手段は、前記駆動機構と前記操作機構とを含む仮想物体を仮想し、前記データ取得手段によって取得された前記物理量のデータに基づいて、前記駆動機構及び前記操作機構への入力によって前記仮想物体に表れる挙動に、前記前記駆動機構及び前記操作機構とを追従させるための指令値を算出し、該算出した指令値に基づいて、前記動作の制御を実現する、
ことを特徴とする請求項1又は2に記載の遠隔装填システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔装填システム、制御装置、遠隔装填方法、及びプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、トンネル等の掘削工事において、爆薬を用いた発破工法が広く利用されている。発破工法では、一般的に、含水爆薬(スラリー爆薬)や、硝安油剤爆薬(アンホ爆薬)等の爆薬と、装薬孔の孔口を塞ぐための込め物を、例えば、込め棒と呼ばれる工具を用いて人手によって装填をする。このように人手による装填を行う場合、切羽に近接して作業を行う必要がある。
しかしながら、切羽では土砂や岩石が自然的ないし人的要因によって剥離や脱落するという、いわゆる肌落ちが発生するおそれがある。そのため、発破工法による掘削工事は、作業者への危険を伴う作業という側面もある。
【0003】
このような状況を考慮し、装填作業を遠隔操作により実現することが試みられている。例えば、特許文献1に開示の技術では、ロボットアームが、装薬孔の近傍で圧送ホースを把持する。また、ロボットアームにカメラを設置し、このカメラの撮影画像をリアルタイムに表示することで、作業者による遠隔操作を支援する。
そして、作業者からの遠隔操作に基づいて、このロボットアームが、圧送ホースの先端を装薬孔に挿入する。これにより、作業者は、切羽に近づくことなく装填作業を行うことができるとされている。
【先行技術文献】
【特許文献】
【0004】
特開2020-003145号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、装填作業は、高い作業精度が要求される作業である。そのため、上述の特許文献1のように、単に撮像画像を参照して遠隔操作を行うだけでは、要求される作業精度を満たすことは現実的には困難である。そこで、作業者が切羽に近づいて、目視をしながら操作を行うことも考えられるが、これでは作業者の安全を確保することができない。
【0006】
本発明は、このような状況に鑑みてなされたものである。そして、本発明の課題は、作業者の安全を確保しつつ、より適切に爆薬等の装填を行うことである。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の一実施形態に係る遠隔装填システムは、
爆薬及び込め物の少なくとも何れかである挿入対象物を、装薬孔に向かって案内するガイド部材と、
前記挿入対象物を、前記ガイド部材を介して前記装薬孔に装填するために駆動する駆動機構と、
ユーザからの前記駆動機構に対する遠隔操作を受け付ける操作機構と、
前記操作機構に入力された前記ユーザからの前記駆動機構に対する遠隔操作に応じて、前記駆動機構の動作を制御すると共に、前記駆動機構に加わる力を、前記操作機構が前記ユーザに対して伝達する動作を制御する動作制御手段と、
を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、作業者の安全を確保しつつ、より適切に爆薬等の装填を行うことができる。
【図面の簡単な説明】
【0009】
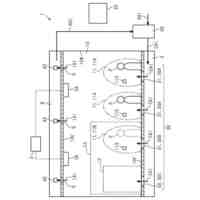
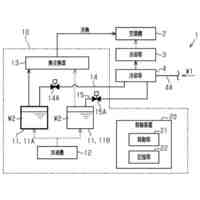
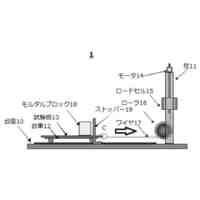
本実施形態に係る遠隔装填システム1の全体構成を示す模式図である。
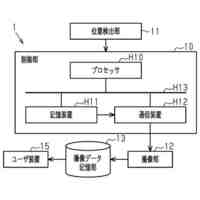
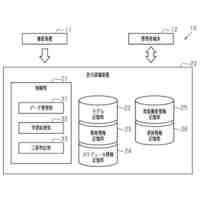
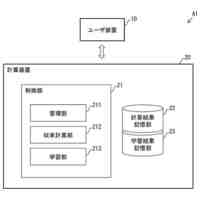
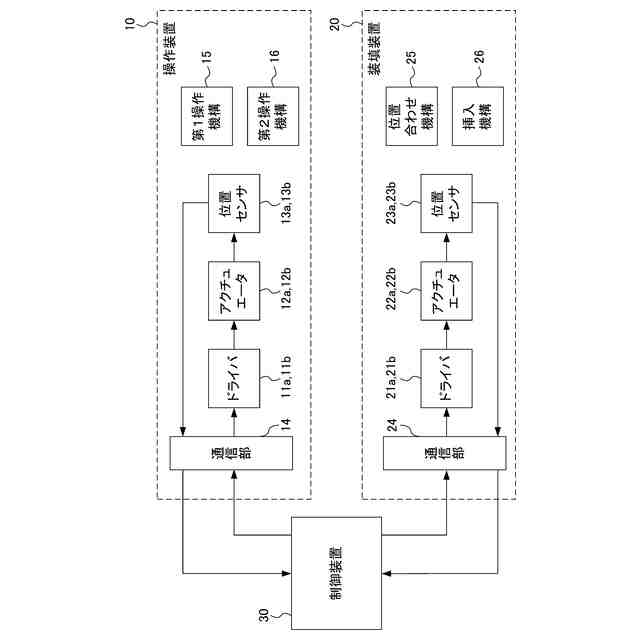
操作装置10と、装填装置20のハードウェア構成を示すブロック図である。
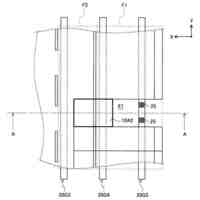
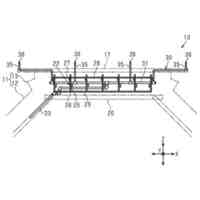
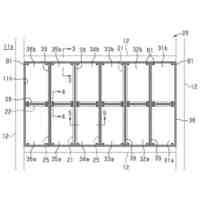
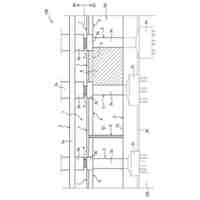
装填装置20の構成例について示す斜視図である。
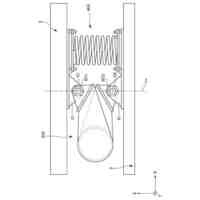
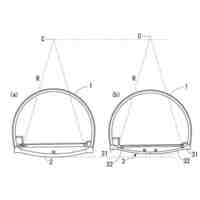
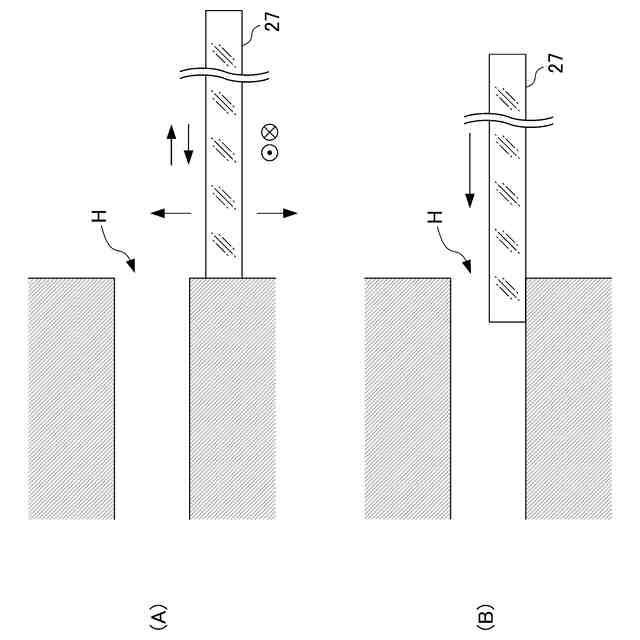
位置合わせ機構25による、位置合わせについて示す模式図である。
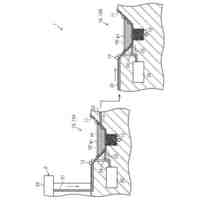
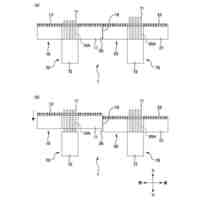
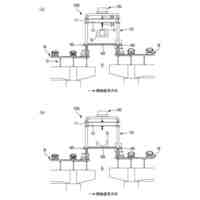
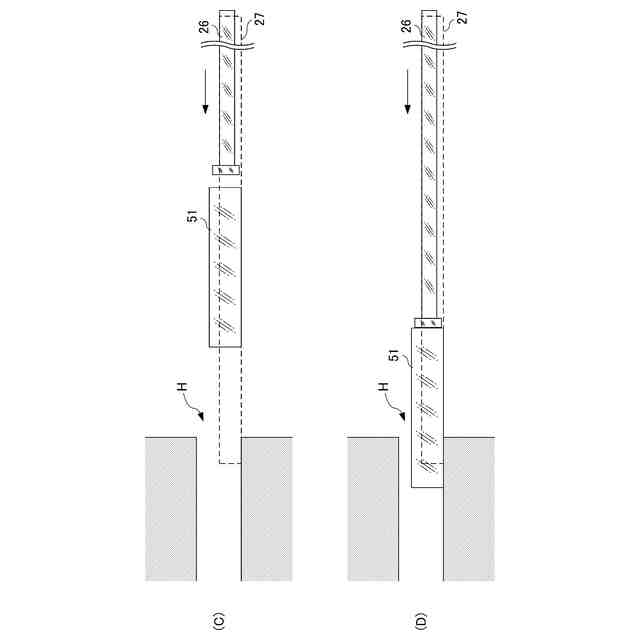
挿入機構26による、親ダイ51等の、装薬孔Hへの挿入について示す第1の模式図である。
挿入機構26による、親ダイ51等の、装薬孔Hへの挿入について示す第2の模式図である。
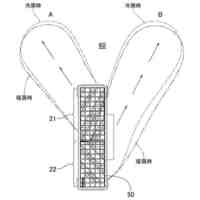
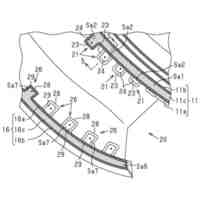
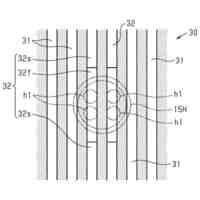
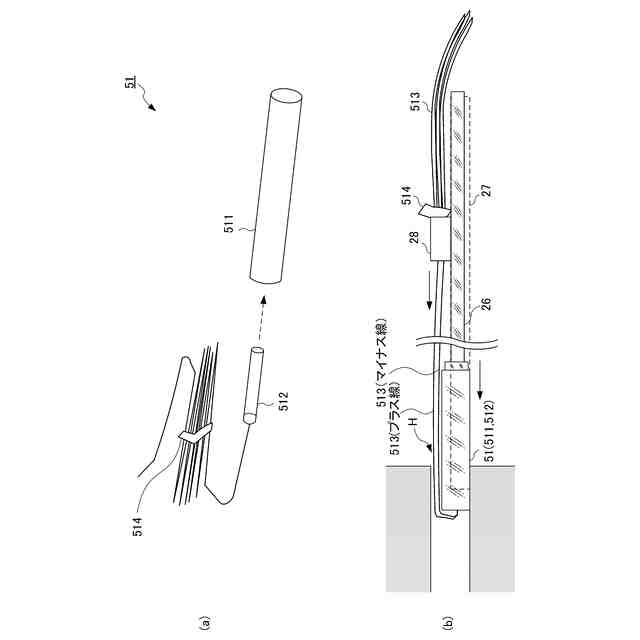
親ダイ51の構造及び脚線機構28による動作について示す模式図である。
制御装置30のハードウェア構成を示すブロック図である。
制御装置30の機能的構成を示すブロック図である。
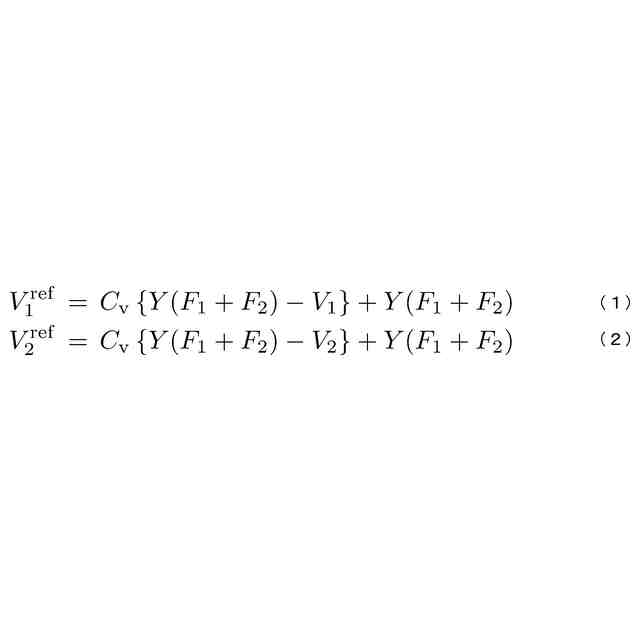
動作制御部312の制御アルゴリズムを示すブロック図である。
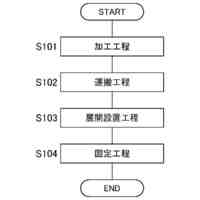
遠隔装填システム1が実行する動作制御処理の流れを説明するフローチャートである。
遠隔装填システム1が実行する遠隔装填処理の流れを説明するフローチャートである。
変形例1における制御アルゴリズムの概念を示す模式図である。
【発明を実施するための形態】
【0010】
以下、添付の図面を参照して本発明の実施形態の一例について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
壁
1か月前
株式会社大林組
制振構造
2日前
株式会社大林組
接合方法
23日前
株式会社大林組
吹出口装置
1か月前
株式会社大林組
免震構造物
27日前
株式会社大林組
空調システム
5日前
株式会社大林組
壁材形成方法
7日前
株式会社大林組
蓄熱システム
19日前
株式会社大林組
床版取替え工法
27日前
株式会社大林組
構造体の施工方法
12日前
株式会社大林組
ドレンチャー設備
23日前
株式会社大林組
インバート更新工法
27日前
株式会社大林組
床スラブの形成方法
1日前
株式会社大林組
雨水貯留浸透システム
8日前
株式会社大林組
自然換気通知システム
1日前
株式会社大林組
建物構造及び建築方法
1か月前
株式会社大林組
セメント系水硬性材料
23日前
株式会社大林組
難燃処理木材の評価方法
21日前
株式会社大林組
既存建物の免震改修方法
8日前
株式会社大林組
空調システム及び空調方法
5日前
株式会社大林組
構造物形成方法及び構造物
16日前
株式会社大林組
建築物の基礎構造及び方法
1か月前
株式会社シェルター
構造体
1か月前
株式会社シェルター
構造体
1か月前
株式会社大林組
コンクリート構造及び接合方法
23日前
株式会社大林組
防火塀及び建物間の延焼防止構造
5日前
株式会社大林組
安全管理システム及び安全管理方法
22日前
株式会社大林組
安定液管理方法及び安定液管理装置
1か月前
株式会社大林組
点検管理システム及び点検管理方法
1か月前
株式会社大林組
評価方法、処理装置、及びプログラム
27日前
株式会社大林組
差分認識方法および差分認識システム
1か月前
株式会社大林組
地中連続壁の構築方法及び地中連続壁
1か月前
株式会社大林組
免震建物構造及び免震建物構造施工方法
5日前
株式会社大林組
施工支援装置及び資機材の揚重搬送方法
15日前
BASFジャパン株式会社
型枠用離型剤
15日前
株式会社大林組
計算システム、計算方法及び計算プログラム
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ