TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024078269
公報種別
公開特許公報(A)
公開日
2024-06-10
出願番号
2022190706
出願日
2022-11-29
発明の名称
パラメータ決定装置及びプログラム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
13/00 20060101AFI20240603BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】サーボパラメータ群の各値を決定するための作業工数を削減可能なパラメータ決定装置及びプログラムを提供する。
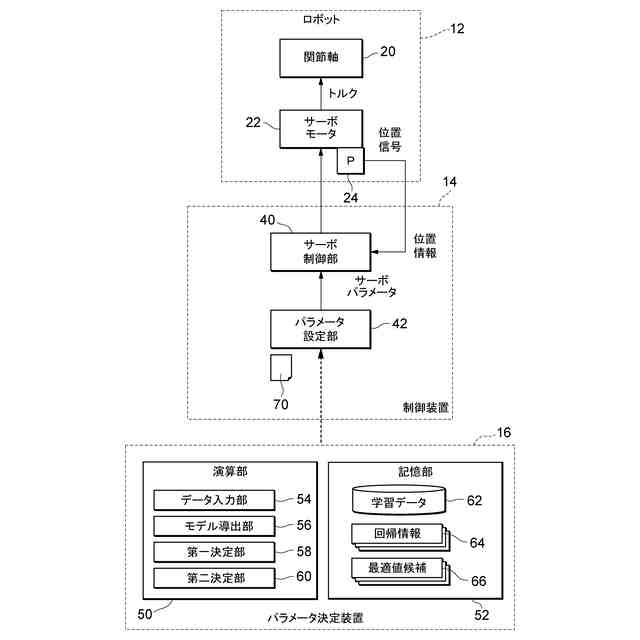
【解決手段】パラメータ決定装置16は、サーボ制御に関するサーボパラメータ群を説明変数とし、サーボ制御が行われる制御対象物(12)の状態に対する評価値を目的変数とする、複数種類の回帰モデルを導出するモデル導出部56と、回帰モデルに基づく最適化処理を行い、回帰モデルの種類毎に求められたサーボパラメータ群の解を複数組の最適値候補として決定する第一決定部58と、複数組の最適値候補の中から一組の最適値候補を選択し、該一組の最適値候補をサーボパラメータ群の確定値70として決定する第二決定部60と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
サーボ制御に関するサーボパラメータ群を説明変数とし、前記サーボ制御が行われる制御対象物の状態に対する評価値を目的変数とする、複数種類の回帰モデルを導出するモデル導出部と、
前記モデル導出部により導出された前記回帰モデルに基づく最適化処理を行い、前記回帰モデルの種類毎に求められた前記サーボパラメータ群の解を複数組の最適値候補として決定する第一決定部と、
前記第一決定部により決定された前記複数組の最適値候補の中から一組の最適値候補を選択し、該一組の最適値候補を前記サーボパラメータ群の確定値として決定する第二決定部と、
を備える、パラメータ決定装置。
続きを表示(約 700 文字)
【請求項2】
前記第二決定部は、前記複数種類の回帰モデルに従って前記最適値候補に対応する複数の個別評価値を算出し、該複数の個別評価値を用いて前記最適値候補に対応する総合評価値を算出し、前記複数の最適値候補の中から総合評価値が最小又は最大になる前記一組の最適値候補を前記サーボパラメータ群の確定値として決定する、
請求項1に記載のパラメータ決定装置。
【請求項3】
前記総合評価値は、前記複数の個別評価値に対する荷重和である、
請求項2に記載のパラメータ決定装置。
【請求項4】
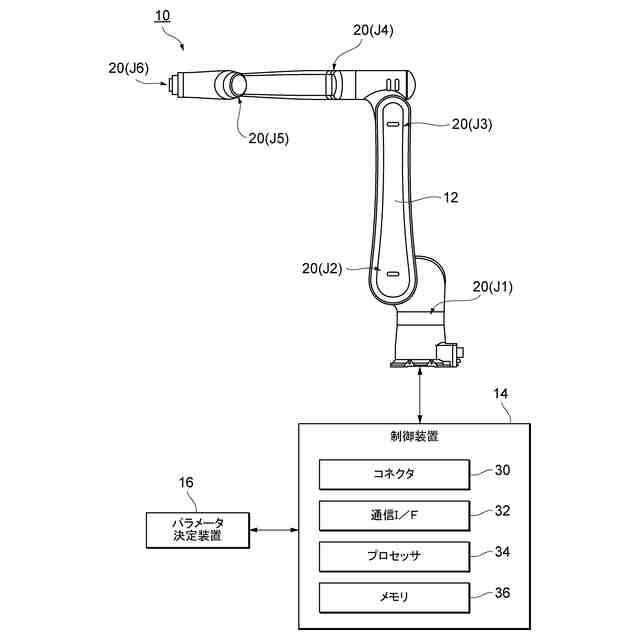
前記制御対象物は、複数の関節軸を有するロボットである、
請求項1に記載のパラメータ決定装置。
【請求項5】
前記回帰モデルは、前記ロボットにおける位置、姿勢又は動きの種類に応じて導出される、
請求項4に記載のパラメータ決定装置。
【請求項6】
サーボ制御に関するサーボパラメータ群を説明変数とし、前記サーボ制御が行われる制御対象物の状態に対する評価値を目的変数とする、複数種類の回帰モデルを導出する導出ステップと、
導出された前記回帰モデルに基づく最適化処理を行い、前記回帰モデルの種類毎に求められた前記サーボパラメータ群の解を複数組の最適値候補として決定する第一決定ステップと、
決定された前記複数組の最適値候補の中から一組の最適値候補を選択し、該一組の最適値候補を前記サーボパラメータ群の確定値として決定する第二決定ステップと、
を一つ又は複数のコンピュータに実行させる、パラメータ決定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、パラメータ決定装置及びプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来から、制御対象物に対するサーボ制御の適正化を行うべく、サーボ制御に関するパラメータ(以下、「サーボパラメータ」という)の各値を決定する手法が知られている。
【0003】
特許文献1には、サーボ制御系による所定の動作を通じて得られるサーボ情報と、基準値との間の誤差が減少するように、サーボパラメータを調整する方法が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開平08-221132号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、特許文献1に開示される調整方法では、この方法を実現するための特別な調整装置が必要であり、あるいは、サーボ制御系にも物理的な改造を加える必要がある。特に、複数の関節軸を有する多関節ロボットのように、様々な姿勢・動きで複合的な動作を行う場合、調整対象であるサーボパラメータの個数は膨大であるため、パラメータ値の最適な組み合わせを探索するための作業工数が増加するという問題がある。
【0006】
本発明はこのような問題に鑑みてなされたものであり、その目的は、サーボパラメータ群の各値を決定するための作業工数を削減可能なパラメータ決定装置及びプログラムを提供することにある。
【課題を解決するための手段】
【0007】
本発明におけるパラメータ決定装置は、サーボ制御に関するサーボパラメータ群を説明変数とし、前記サーボ制御が行われる制御対象物の状態に対する評価値を目的変数とする、複数種類の回帰モデルを導出するモデル導出部と、前記モデル導出部により導出された前記回帰モデルに基づく最適化処理を行い、前記回帰モデルの種類毎に求められた前記サーボパラメータ群の解を複数組の最適値候補として決定する第一決定部と、前記第一決定部により決定された前記複数組の最適値候補の中から一組の最適値候補を選択し、該一組の最適値候補を前記サーボパラメータ群の確定値として決定する第二決定部と、を備える。
【0008】
また、前記第二決定部は、前記複数種類の回帰モデルに従って前記最適値候補に対応する複数の個別評価値を算出し、該複数の個別評価値を用いて前記最適値候補に対応する総合評価値を算出し、前記複数の最適値候補の中から総合評価値が最小又は最大になる前記一組の最適値候補を前記サーボパラメータ群の確定値として決定してもよい。
【0009】
また、前記総合評価値は、前記複数の個別評価値に対する荷重和であってもよい。
【0010】
また、前記制御対象物は、複数の関節軸を有するロボットであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
可変容量型ピストンポンプ
10日前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
4か月前
株式会社右川ゴム製造所
把持装置
2か月前
個人
ロボットシステム
6か月前
株式会社マキタ
動力工具
27日前
株式会社不二越
ロボット
6か月前
学校法人立命館
グリッパ
3か月前
トヨタ自動車株式会社
関節機構
6か月前
学校法人立命館
ロボットハンド
3か月前
川崎重工業株式会社
罫書用治具
13日前
トヨタ自動車株式会社
ハンド構造
3日前
株式会社ダイヘン
搬送装置
1か月前
個人
プーリーキー抜き治具
3か月前
株式会社ダイヘン
搬送装置
1か月前
宮川工機株式会社
板状部品移動装置
1か月前
東京都公立大学法人
ロボットハンド
1か月前
CKD株式会社
電動把持装置
1か月前
国立大学法人山形大学
二重関節機構
27日前
株式会社不二越
予測システム
4か月前
株式会社越智工業所
ブレーカ用カバー
6か月前
工機ホールディングス株式会社
作業機
12日前
工機ホールディングス株式会社
作業機
3か月前
株式会社中村製作所
トルクドライバー
3か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
小倉クラッチ株式会社
ロボットハンド
5か月前
株式会社共和製作所
ロボット用アーム
2か月前
工機ホールディングス株式会社
作業機
12日前
工機ホールディングス株式会社
作業機
12日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ