TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024076652
公報種別
公開特許公報(A)
公開日
2024-06-06
出願番号
2022188319
出願日
2022-11-25
発明の名称
検査装置および検査方法
出願人
株式会社大気社
,
株式会社SUBARU
代理人
弁理士法人R&C
主分類
B25J
13/08 20060101AFI20240530BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】装置と被測定物との位置関係を制御して表面の状態を適切に検出できる姿勢を実現する検査装置および検査方法を提供する。
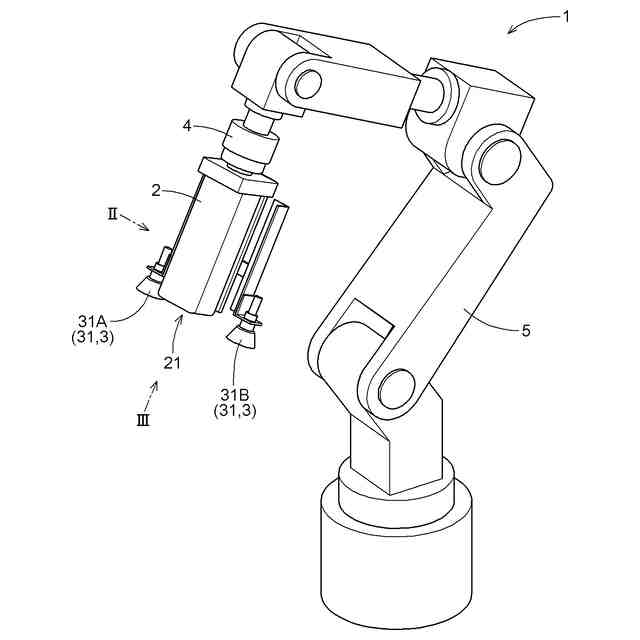
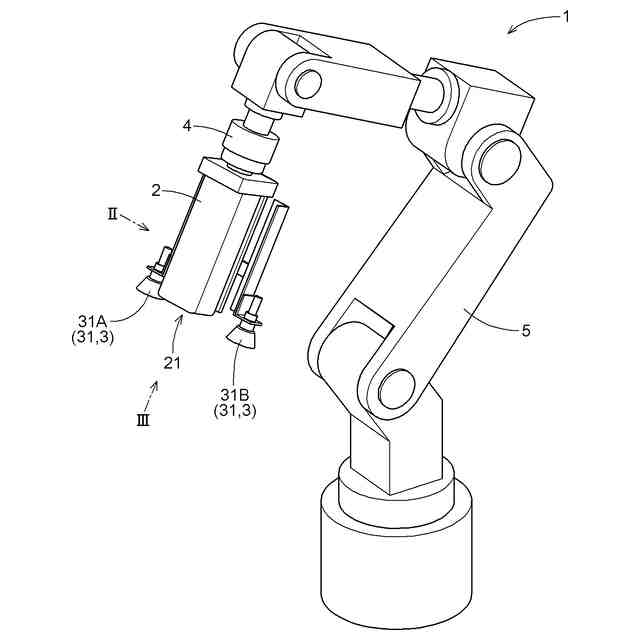
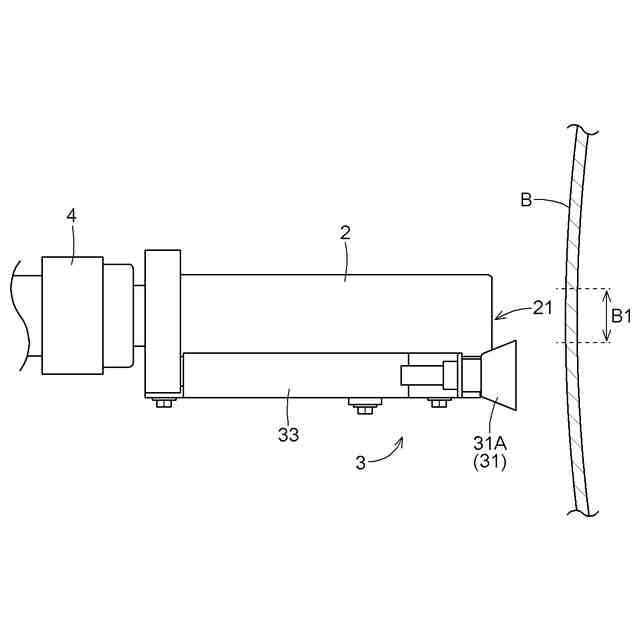
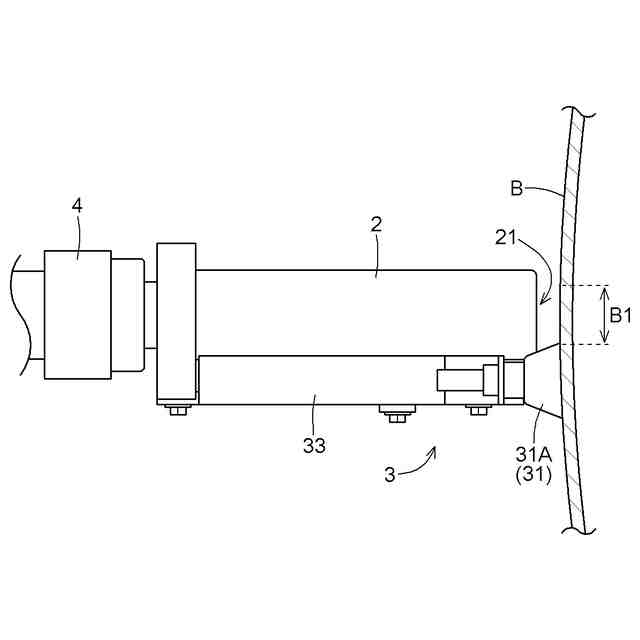
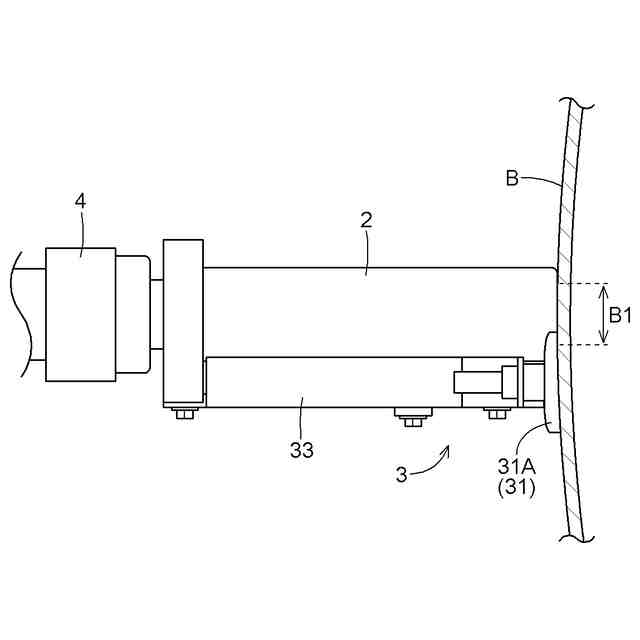
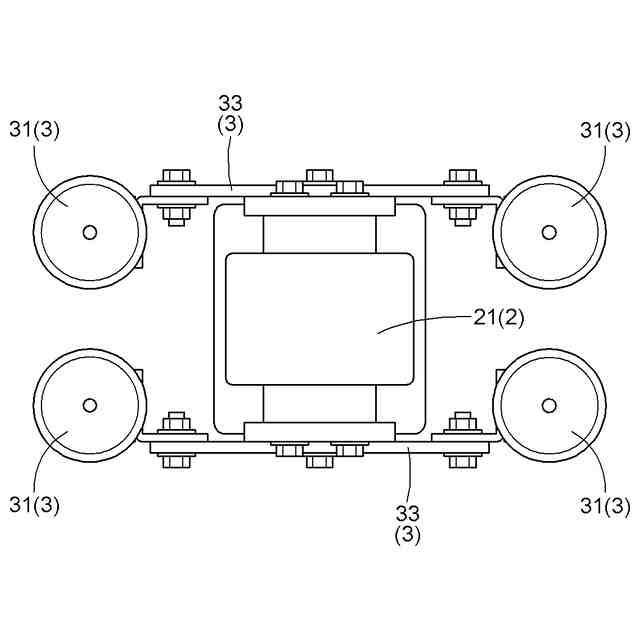
【解決手段】被測定物に対して送信波を送信する送信部および送信波が被測定物に当たることにより生じる返信波を受信する受信部を有する検出器2と、被測定物を吸着して当該被測定物と検出器2との相対位置を規制する吸着器3と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
被測定物に対して送信波を送信する送信部および前記送信波が前記被測定物に当たることにより生じる返信波を受信する受信部を有する検出器と、
前記被測定物を吸着して当該被測定物と前記検出器との相対位置を規制する吸着器と、を備える検査装置。
続きを表示(約 1,100 文字)
【請求項2】
前記吸着器を複数備える請求項1に記載の検査装置。
【請求項3】
それぞれの前記吸着器の動作の有無を独立に制御できる請求項2に記載の検査装置。
【請求項4】
前記検出器が、前記被測定物に当接する当接面を有し、
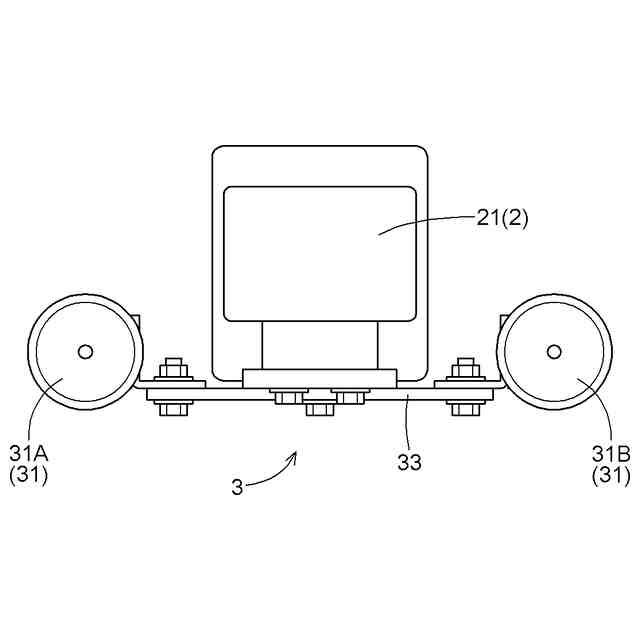
それぞれの前記吸着器が、前記被測定物に当接する吸着パッドを有し、
少なくとも二つの前記吸着パッドが、前記当接面と平面を画定する配置で設けられている請求項2に記載の検査装置。
【請求項5】
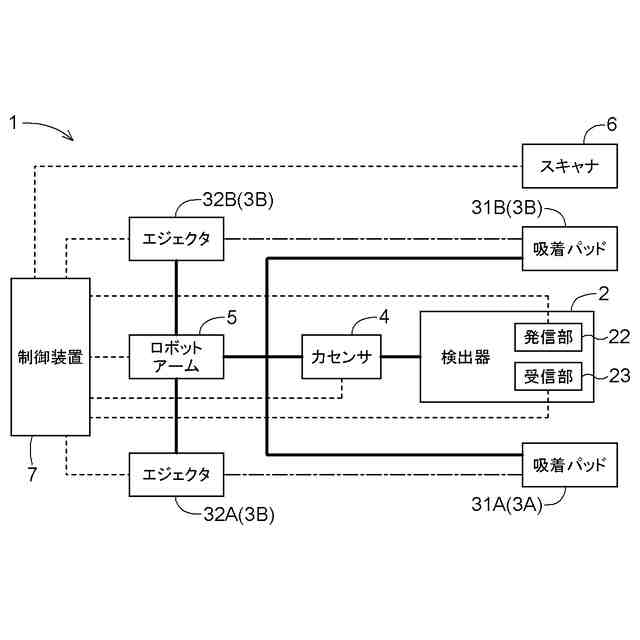
前記検出器および前記吸着器を支持し、かつ、前記検出器および前記吸着器を移動させる移動手段と、
前記被測定物の位置を特定する位置特定手段と、
少なくとも前記移動手段を制御する制御手段と、をさらに備え、
前記制御手段が、前記位置特定手段により特定された前記被測定物の位置に、前記検出器および前記吸着器を移動させるように、前記移動手段を制御する請求項1~4のいずれか一項に記載の検査装置。
【請求項6】
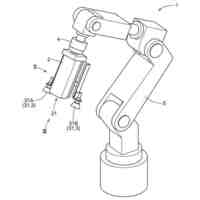
前記移動手段がロボットアームである請求項5に記載の検査装置。
【請求項7】
前記検出器が前記被測定物に当接する力を検出する力センサをさらに備え、
前記移動手段が、前記力センサにより検出される力が所定の範囲になるように、前記検出器を移動させる請求項5に記載の検査装置。
【請求項8】
被測定物に対して送信波を送信する送信部および前記送信波が前記被測定物に当たることにより生じる返信波を受信する受信部を有する検出器と、前記被測定物を吸着する吸着器と、を備える検査装置を用いる検査方法であって、
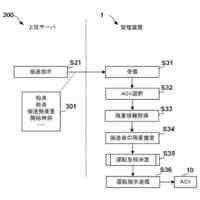
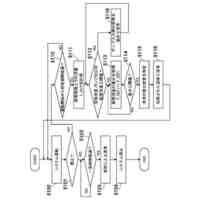
前記吸着器に前記被測定物を吸着させる吸着工程と、
前記吸着器に吸着されている前記被測定物の表面の状態を前記検出器によって検出する検出工程と、を含む検査方法。
【請求項9】
前記検査装置が、さらに、前記検出器および前記吸着器を支持し、かつ、前記検出器および前記吸着器を移動させる移動手段と、前記被測定物の位置を特定する位置特定手段と、少なくとも前記移動手段を制御する制御手段と、をさらに備え、
前記吸着工程より前に、
前記位置特定手段が前記被測定物の位置を特定する位置特定工程と、
前記制御手段が、前記位置特定手段により特定された前記被測定物の位置に、前記検出器および前記吸着器を移動させるように、前記移動手段を制御する移動工程と、をさらに含む請求項8に記載の検査方法。
【請求項10】
前記移動手段がロボットアームである請求項9に記載の検査方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、検査装置および検査方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
塗装やコーティングなどに代表される種々の産業分野において、製品等の表面の状態に興味がもたれており、被測定物の表面の状態を検出する種々の装置が提案されている。
【0003】
たとえば、特開2011-27599号公報(特許文献1)には、検査器に取り付けられるアタッチメントを複数有し、それらのアタッチメントを適宜選択して使用することで、被検査物の色、光沢度、ブロンズ現象等を一つの光源と一つのセンサとで検査可能とする技術が開示されている。また、特開2017-58139号公報(特許文献2)には、受光部への赤外光の入射を抑制した測色計が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2011-27599号公報
特開2017-58139号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
表面の状態を検出する各種の測定を正確に行うためには、測定を実施する装置と被測定物との位置関係を適切に制御することが求められる。この種の装置は、被測定物の表面または塗装等に覆われた基材に対して何らかの物理的な働きかけをして、その反応を検出することによって表面の状態を検出することが多いため、被測定物の表面に対して装置が適切な姿勢で配置されることが、測定精度を高めるために望まれるのである。しかし、特許文献1および特許文献2の技術では、測定を実施する装置と被測定物との位置関係について、十分に検討されていなかった。
【0006】
そこで、装置と被測定物との位置関係を制御して表面の状態を適切に検出できる姿勢を実現する検査装置および検査方法が求められる。
【課題を解決するための手段】
【0007】
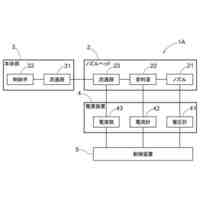
本発明に係る検査装置は、被測定物に対して送信波を送信する送信部および前記送信波が前記被測定物に当たることにより生じる返信波を受信する受信部を有する検出器と、前記被測定物を吸着して当該被測定物と前記検出器との相対位置を規制する吸着器と、を備えることを特徴とする。
【0008】
本発明に係る測定方法は、被測定物に対して送信波を送信する送信部および前記送信波が前記被測定物に当たることにより生じる返信波を受信する受信部を有する検出器と、前記被測定物を吸着する吸着器と、を備える検査装置を用いる検査方法であって、前記吸着器に前記被測定物を吸着させる工程と、前記吸着器に吸着されている前記被測定物の表面の状態を前記検出器によって検出する工程と、を含むことを特徴とする。
【0009】
これらの構成によれば、吸着器によって被測定物と検出器との相対位置を規制できるので、表面の状態を適切に検出できる姿勢を実現できる。
【0010】
以下、本発明の好適な態様について説明する。ただし、以下に記載する好適な態様例によって、本発明の範囲が限定されるわけではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大気社
電着装置
1か月前
株式会社大気社
塗装方法
22日前
株式会社大気社
回収システム
1か月前
株式会社大気社
管理装置及び管理方法
6日前
株式会社大気社
塗装装置および塗装方法
6日前
株式会社大気社
検査装置および検査方法
27日前
株式会社大気社
二酸化炭素回収システム
1か月前
株式会社大気社
除菌装置および空調システム
14日前
株式会社大気社
放出処理装置、及び二酸化炭素回収システム
1か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
3か月前
株式会社ツノダ
挟持工具
4か月前
株式会社右川ゴム製造所
把持装置
3か月前
川崎重工業株式会社
ハンド
4か月前
日東工器株式会社
衝撃工具
6日前
個人
ロボットシステム
6か月前
学校法人立命館
ロボットハンド
3か月前
トヨタ自動車株式会社
関節機構
7か月前
学校法人立命館
グリッパ
3か月前
株式会社マキタ
動力工具
1か月前
株式会社不二越
ロボット
6か月前
川崎重工業株式会社
罫書用治具
23日前
トヨタ自動車株式会社
関節機構
6か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
トヨタ自動車株式会社
ハンド構造
13日前
個人
プーリーキー抜き治具
3か月前
株式会社不二越
予測システム
4か月前
国立大学法人山形大学
二重関節機構
1か月前
CKD株式会社
電動把持装置
2か月前
東京都公立大学法人
ロボットハンド
1か月前
宮川工機株式会社
板状部品移動装置
1か月前
個人
スロープバリビス-ビス&-ドライバー
1か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ