TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024086376
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022201470
出願日
2022-12-16
発明の名称
管理装置及び管理方法
出願人
株式会社大気社
代理人
弁理士法人大塚国際特許事務所
主分類
G05D
1/43 20240101AFI20240620BHJP(制御;調整)
要約
【課題】無人搬送車のバッテリの交換頻度を低減可能な技術を提供すること。
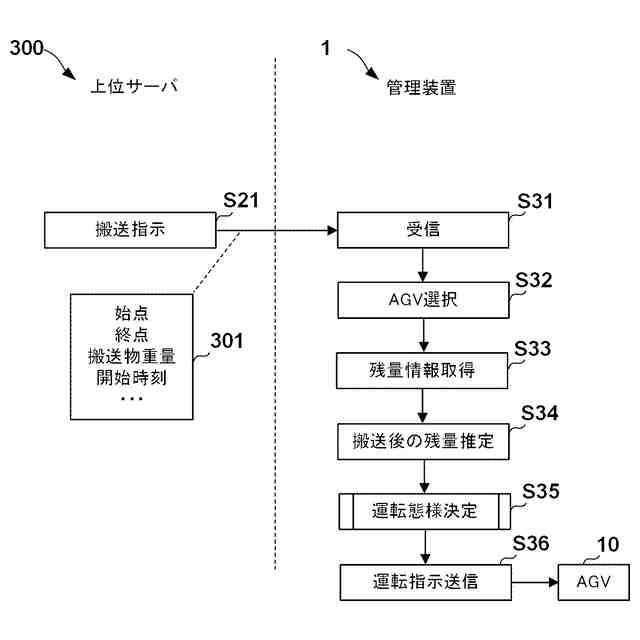
【解決手段】生産設備内において搬送対象物を搬送する複数の無人搬送車の運転を管理する管理装置であって、前記複数の無人搬送車から選択された選択搬送車が備えるバッテリの残量情報を取得する残量情報取得手段と、搬送先を特定する情報を含む、搬送対象物の搬送条件を取得する搬送条件取得手段と、前記残量情報と前記搬送条件とに基づいて、前記搬送対象物が前記搬送先に搬送された際の前記バッテリの残量を推定する推定手段と、前記推定手段の推定結果に基づいて前記選択搬送車の運転態様を決定する決定手段と、を備える。
【選択図】 図6
特許請求の範囲
【請求項1】
生産設備内において搬送対象物を搬送する複数の無人搬送車の運転を管理する管理装置であって、
前記複数の無人搬送車から選択された選択搬送車が備えるバッテリの残量情報を取得する残量情報取得手段と、
搬送先を特定する条件を含む、搬送対象物の搬送条件を取得する搬送条件取得手段と、
前記残量情報と前記搬送条件とに基づいて、前記搬送対象物が前記搬送先に搬送された際の前記バッテリの残量を推定する推定手段と、
前記推定手段の推定結果に基づいて前記選択搬送車の運転態様を決定する決定手段と、を備える、
ことを特徴とする管理装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の管理装置であって、
前記決定手段は、
前記推定結果が示す残量が下限閾値以上である場合は第一の運転態様を決定し、
前記推定結果が示す残量が前記下限閾値未満である場合は第二の運転態様を決定する、
ことを特徴とする管理装置。
【請求項3】
請求項2に記載の管理装置であって、
前記生産設備には、前記バッテリを充電する充電領域が設けられており、
前記第一の運転態様とは、前記充電領域において前記バッテリを充電せずに、前記搬送対象物を前記選択搬送車により前記搬送先に搬送することである、
ことを特徴とする管理装置。
【請求項4】
請求項2に記載の管理装置であって、
前記生産設備には、前記バッテリを充電する充電領域が設けられており、
前記第二の運転態様とは、前記充電領域において前記バッテリを充電した後に、前記搬送対象物を前記選択搬送車により前記搬送先に搬送することである、
ことを特徴とする管理装置。
【請求項5】
請求項2に記載の管理装置であって、
前記第二の運転態様とは、前記バッテリが前記選択搬送車によって前記搬送対象物を前記搬送先に搬送可能な残量を有する場合であっても、前記搬送対象物を前記選択搬送車では前記搬送先に搬送しないことである、
ことを特徴とする管理装置。
【請求項6】
請求項1に記載の管理装置であって、
前記搬送条件は、前記搬送対象物の搬送元を特定する条件を含み、
前記推定手段は、前記搬送元から前記搬送先までの搬送距離が長いほど、前記バッテリの残量を少なく推定する、
ことを特徴とする管理装置。
【請求項7】
請求項1に記載の管理装置であって、
前記搬送条件は、前記搬送対象物の重量を特定する条件を含み、
前記推定手段は、前記重量が重いほど、前記バッテリの残量を少なく推定する、
ことを特徴とする管理装置。
【請求項8】
請求項1に記載の管理装置であって、
前記生産設備には、相対的に温度が高い高温領域が設けられており、
前記搬送条件は、前記搬送対象物の搬送元を特定する条件を含み、
前記推定手段は、前記搬送元から前記搬送先の経路中に前記高温領域が存在する場合は、存在しない場合よりも前記バッテリの残量を少なく推定する、
ことを特徴とする管理装置。
【請求項9】
請求項1に記載の管理装置であって、
前記生産設備には、相対的に温度が低い低温領域が設けられており、
前記搬送条件は、前記搬送対象物の搬送元を特定する条件を含み、
前記推定手段は、前記搬送元から前記搬送先の経路中に前記低温領域が存在する場合は、存在しない場合よりも前記バッテリの残量を少なく推定する、
ことを特徴とする管理装置。
【請求項10】
請求項2に記載の管理装置であって、
前記残量を百分率で特定する場合、前記下限閾値は、20%を超える値である、
ことを特徴とする管理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人搬送車の運転管理技術に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
生産設備における搬送対象物の搬送に、無人搬送車を利用する技術が知られている。特許文献1には自動車の車体の塗装設備において、車体の搬送に無人搬送車(無軌道式搬送台車28)を用いた技術が開示されている。また、特許文献2には生産設備内に充電エリアを設け、無人搬送車(車両100)のバッテリを充電領域で充電する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特表2020-524109号公報
特表2022-517314号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
バッテリは過放電状態になると劣化が急速に進行する。搬送開始の段階で無人搬送車を搬送先まで搬送するに足るバッテリ残量があったとしても、搬送先で過放電状態に陥るとバッテリの寿命が低下し、新しいバッテリと交換する頻度が高くなる。
【0005】
本発明の目的は、無人搬送車のバッテリの交換頻度を低減可能な技術を提供することにある。
【課題を解決するための手段】
【0006】
本発明によれば、
生産設備内において搬送対象物を搬送する複数の無人搬送車の運転を管理する管理装置であって、
前記複数の無人搬送車から選択された選択搬送車が備えるバッテリの残量情報を取得する残量情報取得手段と、
搬送先を特定する情報を含む、搬送対象物の搬送条件を取得する搬送条件取得手段と、
前記残量情報と前記搬送条件とに基づいて、前記搬送対象物が前記搬送先に搬送された際の前記バッテリの残量を推定する推定手段と、
前記推定手段の推定結果に基づいて前記選択搬送車の運転態様を決定する決定手段と、を備える、
ことを特徴とする管理装置が提供される。
【発明の効果】
【0007】
本発明によれば、無人搬送車のバッテリの交換頻度を低減可能な技術を提供することができる。
【図面の簡単な説明】
【0008】
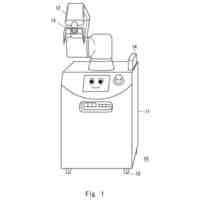
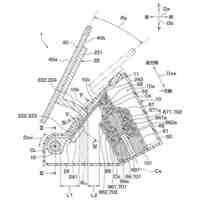
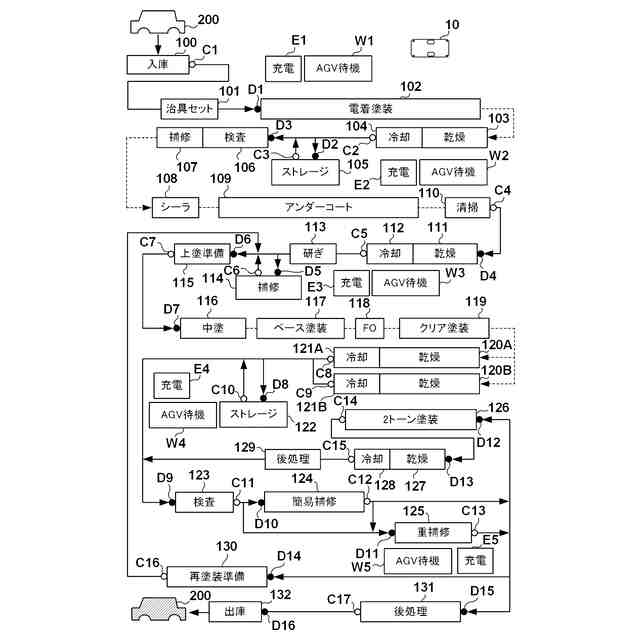
本発明が適用可能な生産設備の例を示すレイアウト図。
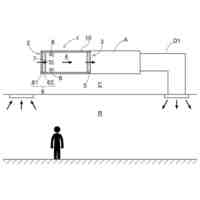
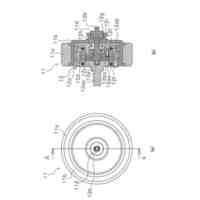
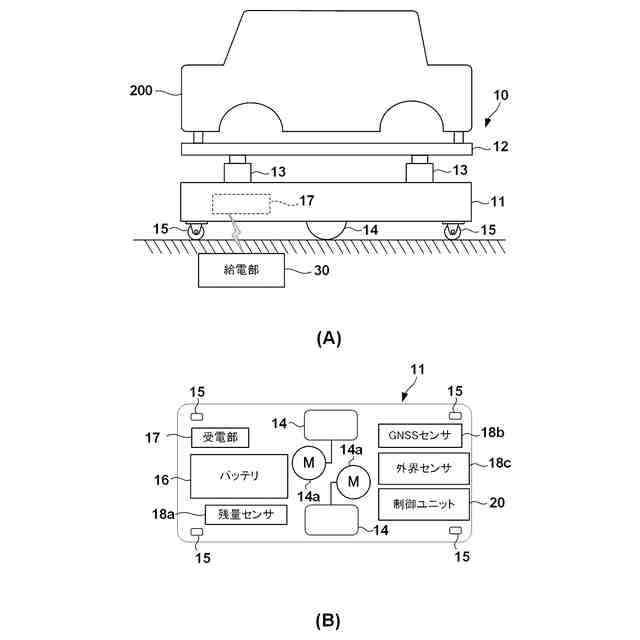
(A)及び(B)は無人搬送車の説明図。
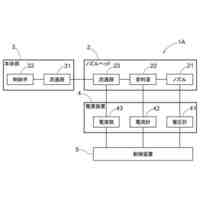
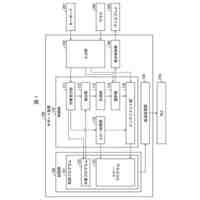
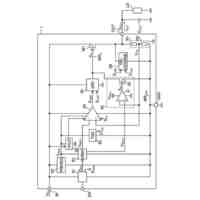
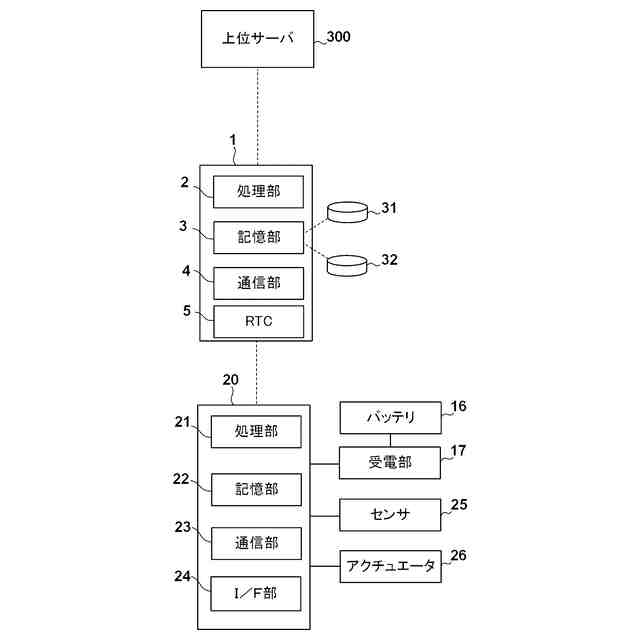
図1の生産設備の制御系のシステム図。
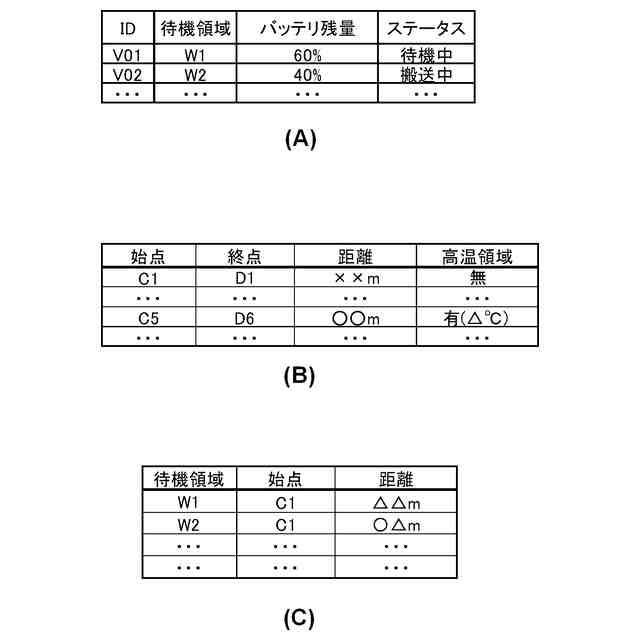
(A)はAGV管理データベースに蓄積される情報の例を示す図、(B)及び(C)は搬送経路データベースに蓄積される情報の例を示す図。
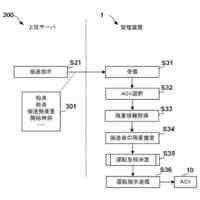
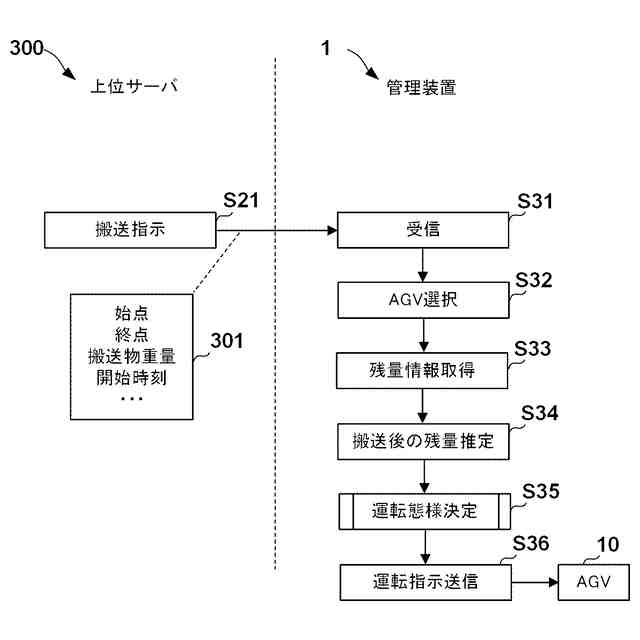
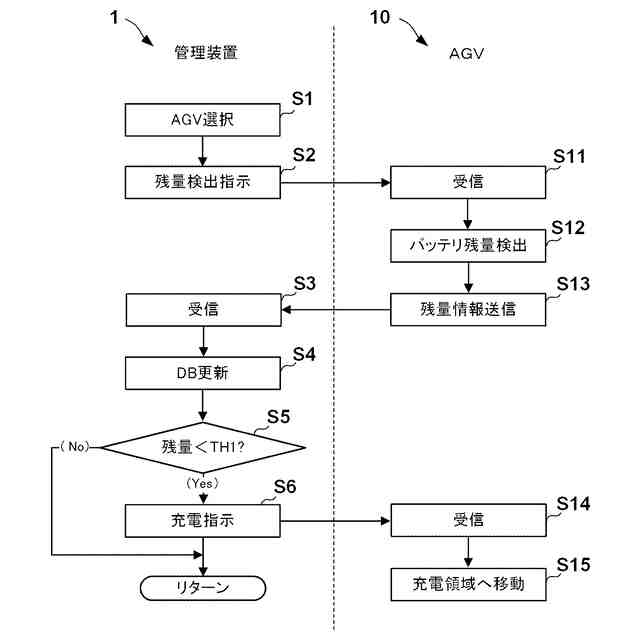
管理装置の処理例を示すフローチャート。
管理装置の処理例を示すフローチャート。
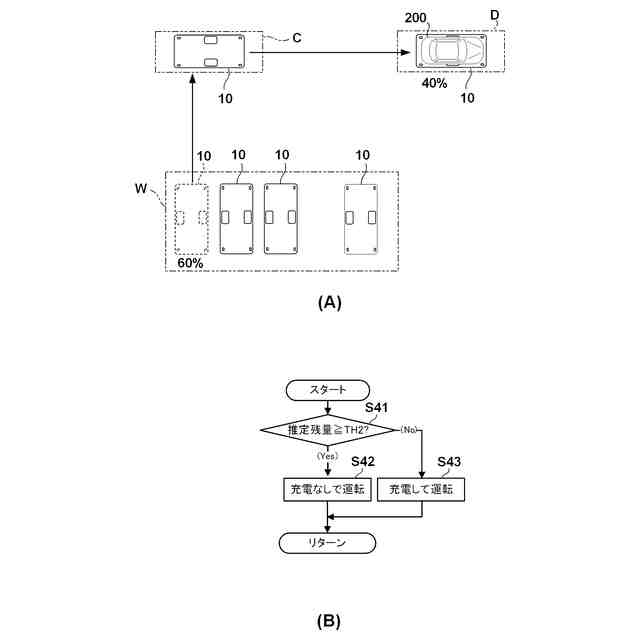
(A)はバッテリ残量の推定処理の説明図、(B)は管理装置の処理例を示すフローチャート。
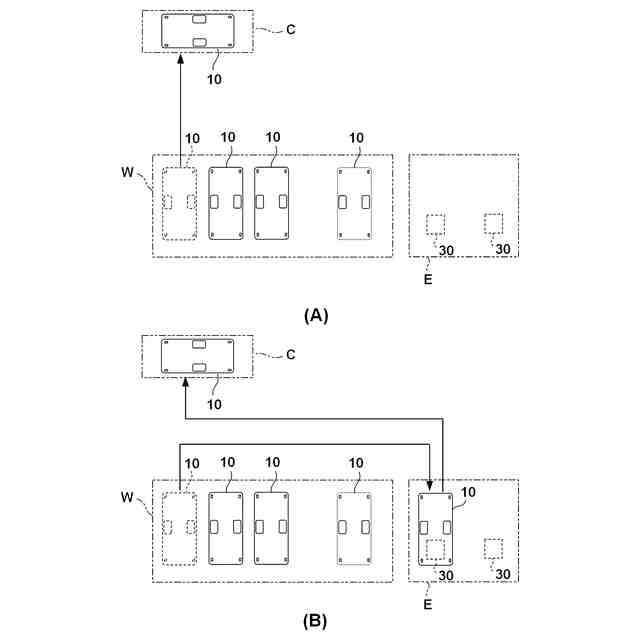
(A)及び(B)は無人搬送車の運転態様の例を示す図。
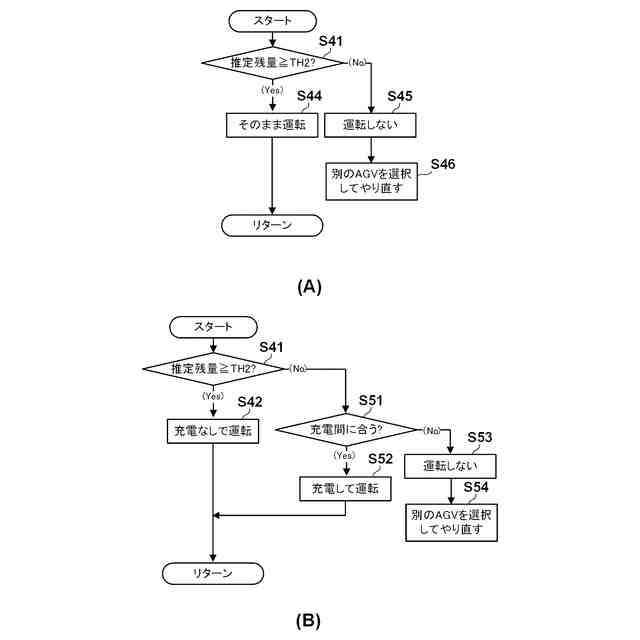
(A)及び(B)は管理装置の処理例を示すフローチャート。
(A)及び(B)は無人搬送車の運転態様の例を示す図。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態で説明されている特徴の組み合わせの全てが発明に必須のものとは限らない。実施形態で説明されている複数の特徴のうち二つ以上の特徴は任意に組み合わされてもよい。また、同一若しくは同様の構成には同一の参照番号を付し、重複した説明は省略する。
【0010】
<生産設備の概要>
図1は本発明が適用可能な生産設備の例を示すレイアウト図である。図示の例は、自動車の車体200の塗装処理設備であり、作業を行う複数の領域101~132を含む。図中、領域間を結ぶ矢印は搬送対象物である車体200の搬送順序を示しており、実線は無人搬送車(AGV)10による車体200の搬送経路を、破線は不図示のコンベアによる車体200の搬送経路を、それぞれ示している。AGV待機領域W1~W5(総称する場合待機領域Wと呼ぶ)は、搬送待機中のAGV10が配置される領域である。一つの待機領域Wは複数のAGV10が待機可能な面積を有している。充電領域E1~E5(総称する場合充電領域Eと呼ぶ)はAGV10のバッテリを充電するための領域であり、充電設備が配備される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大気社
塗装方法
20日前
株式会社大気社
管理装置及び管理方法
4日前
株式会社大気社
塗装装置および塗装方法
4日前
株式会社大気社
除菌装置および空調システム
12日前
エイブリック株式会社
基準電流源
21日前
株式会社クボタ
作業車
1か月前
株式会社エクセディ
作業ロボット
2か月前
トヨタ自動車株式会社
自動作業装置
1か月前
アズビル株式会社
流量制御システム
1か月前
オムロン株式会社
開発装置、開発方法
1か月前
三菱電機株式会社
移動体制御装置
2か月前
株式会社ダイフク
搬送設備
1か月前
マキノジェイ株式会社
工作機械
20日前
岩田工機株式会社
加工装置
2か月前
株式会社ダイフク
物品搬送設備
1か月前
村田機械株式会社
搬送車システム
2か月前
株式会社デンソー
過電流検出回路
1か月前
村田機械株式会社
無人搬送車システム
1か月前
オムロン株式会社
サポート装置およびサポート方法
20日前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
ローム株式会社
電圧生成回路
18日前
CKD日機電装株式会社
カスケード形PID制御系の設計法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
横河電機株式会社
ロボット管理システム
28日前
株式会社デンソー
ペダル装置
20日前
オークマ株式会社
工作機械の制御方法及び制御装置
6日前
シャープ株式会社
走行システム及び走行方法
1か月前
多摩川精機株式会社
突入電流防止回路
2か月前
ローム株式会社
リニアレギュレータ
1か月前
丸北研磨株式会社
稼働状況管理システム
4日前
富士電機株式会社
予測装置、予測方法及びプログラム
1か月前
株式会社ディスコ
加工装置
2か月前
オムロン株式会社
回転体ユニットおよびこれを備えた操作装置
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ