TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024074661
公報種別
公開特許公報(A)
公開日
2024-05-31
出願番号
2022185966
出願日
2022-11-21
発明の名称
走行支援方法、プログラム、走行支援装置、及び自律移動体
出願人
国立大学法人金沢大学
代理人
個人
主分類
G08G
1/16 20060101AFI20240524BHJP(信号)
要約
【課題】車両の走行支援において、必要以上に衝突回避制御を行うことを抑制する。
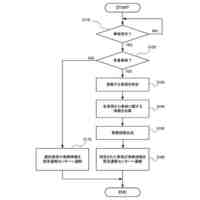
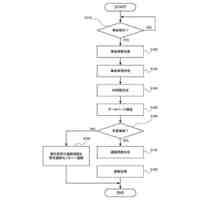
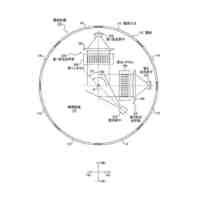
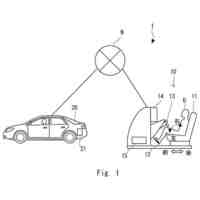
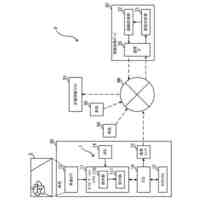
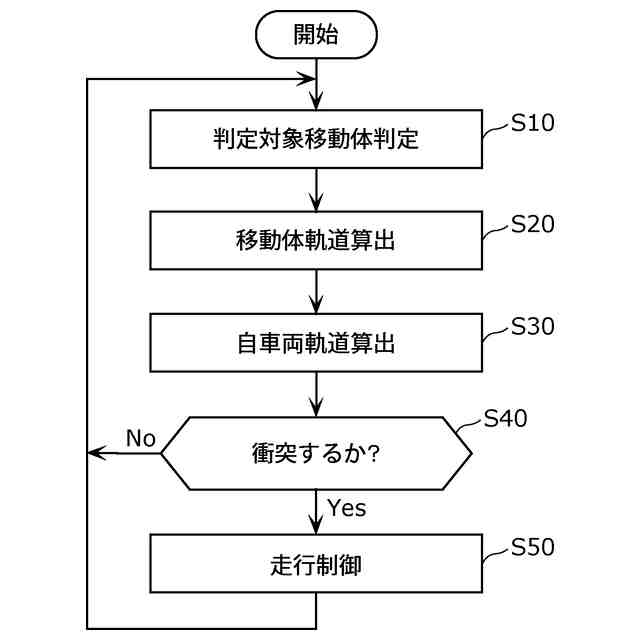
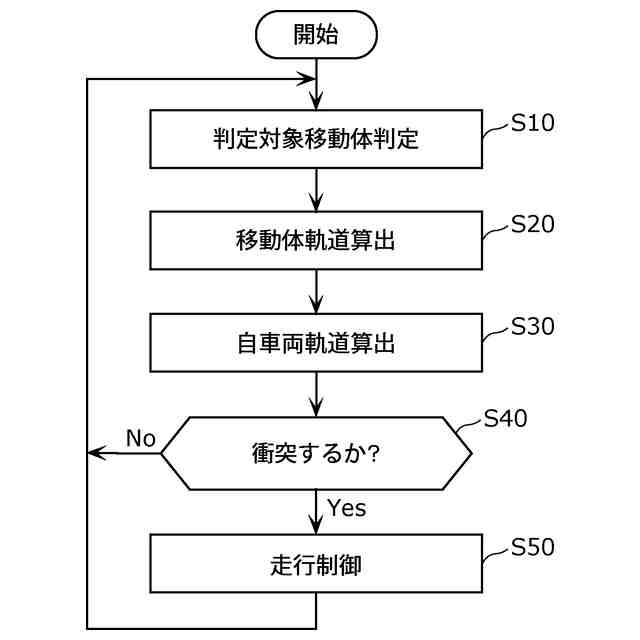
【解決手段】走行支援方法は、自車両の走行を支援する方法であって、自車両(自律移動体V10)が走行する車線の隣の車線を走行する後続の移動体V20が、自車両との衝突判定の対象となる判定対象移動体であるか否かを判定する移動体判定ステップS10と、移動体V20の予測軌道である移動体軌道を算出する移動体軌道算出ステップS20と、自車両の予測軌道である自車両軌道を算出する自車両軌道算出ステップS30と、自車両軌道と、判定対象移動体の移動体軌道とに基づいて衝突判定を行う衝突判定ステップS40とを含み、移動体判定ステップS10において、自車両を基準とした方位角のうち、所定の方位角範囲内にある移動体V20のみを判定対象移動体と判定する。
【選択図】図2
特許請求の範囲
【請求項1】
自車両の走行を支援する走行支援方法であって、
前記自車両が走行する車線の隣の車線を走行する後続の移動体が、前記自車両との衝突判定の対象となる判定対象移動体であるか否かを判定する移動体判定ステップと、
前記移動体の予測軌道である移動体軌道を算出する移動体軌道算出ステップと、
前記自車両の予測軌道である自車両軌道を算出する自車両軌道算出ステップと、
前記自車両軌道と、前記判定対象移動体の前記移動体軌道とに基づいて前記衝突判定を行う衝突判定ステップとを含み、
前記移動体判定ステップにおいて、前記自車両を基準とした方位角のうち、所定の方位角範囲内にある前記移動体のみを前記判定対象移動体と判定する
走行支援方法。
続きを表示(約 1,400 文字)
【請求項2】
前記衝突判定ステップでの判定結果に基づいて、前記自車両の走行制御を行う走行制御ステップをさらに含み、
前記衝突判定ステップにおいて、前記自車両と前記判定対象移動体とが衝突すると判定した場合に、前記走行制御ステップにおいて、衝突を回避するための前記自車両の走行制御を行い、前記衝突判定ステップにおいて、前記自車両と前記判定対象移動体とが衝突しないと判定した場合に、前記走行制御ステップにおいて、衝突を回避するための前記自車両の制御を行わない
請求項1に記載の走行支援方法。
【請求項3】
前記移動体軌道算出ステップにおいて、前記移動体のうち前記判定対象移動体のみの前記移動体軌道を算出する
請求項1又は2に記載の走行支援方法。
【請求項4】
前記移動体判定ステップにおいて、前記自車両を基準とした前記移動体の位置に対応する前記方位角を示す第一角度が所定の閾値角度未満である場合に、前記移動体が前記判定対象移動体であると判定し、前記第一角度が前記閾値角度以上である場合に、前記移動体が前記判定対象移動体ではないと判定し、
前記第一角度は、前記自車両と前記移動体との間の、前記自車両が走行する軌道に沿った方向における間隔の、前記自車両が走行する軌道に垂直な方向における間隔に対する比が正接となる角度である
請求項1又は2に記載の走行支援方法。
【請求項5】
前記衝突判定ステップにおいて、前記自車両軌道及び前記移動体軌道の各々の前記衝突判定の対象に設定される範囲を、前記第一角度に応じて変更する
請求項4に記載の走行支援方法。
【請求項6】
前記衝突判定ステップにおいて、前記第一角度が0度以下である場合、前記自車両軌道及び前記移動体軌道の全範囲が前記衝突判定の対象に設定される
請求項5に記載の走行支援方法。
【請求項7】
前記衝突判定ステップにおいて、前記第一角度が0度より大きく、前記閾値角度未満である場合、前記自車両軌道及び前記移動体軌道の一部の範囲のみが前記衝突判定の対象に設定される
請求項5に記載の走行支援方法。
【請求項8】
前記閾値角度は、変更可能である
請求項4に記載の走行支援方法。
【請求項9】
請求項1又は2に記載の走行支援方法をコンピュータに実行させるための
プログラム。
【請求項10】
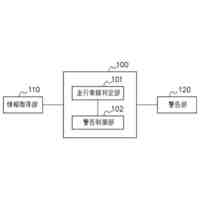
自車両の走行を支援する走行支援装置であって、
前記自車両が走行する車線の隣の車線を走行する後続の移動体が、前記自車両との衝突判定の対象となる判定対象移動体であるか否かを判定する移動体判定部と、
前記移動体の予測軌道である移動体軌道を算出する移動体軌道算出部と、
前記自車両の予測軌道である自車両軌道を算出する自車両軌道算出部と、
前記自車両軌道と、前記判定対象移動体の前記移動体軌道とに基づいて前記衝突判定を行う衝突判定部とを備え、
前記移動体判定部は、前記自車両を基準とした方位角のうち、所定の方位角範囲内にある前記移動体のみを前記判定対象移動体と判定する
走行支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行支援方法、プログラム、走行支援装置、及び自律移動体に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
現在、自動車等の移動体の走行支援に関する研究が活発に進められている(特許文献1等参照)。例えば、特許文献1には、自車両の後続車両の位置を検出し、当該位置に応じて、自車両の横方向位置を制御する発明が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-51760号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
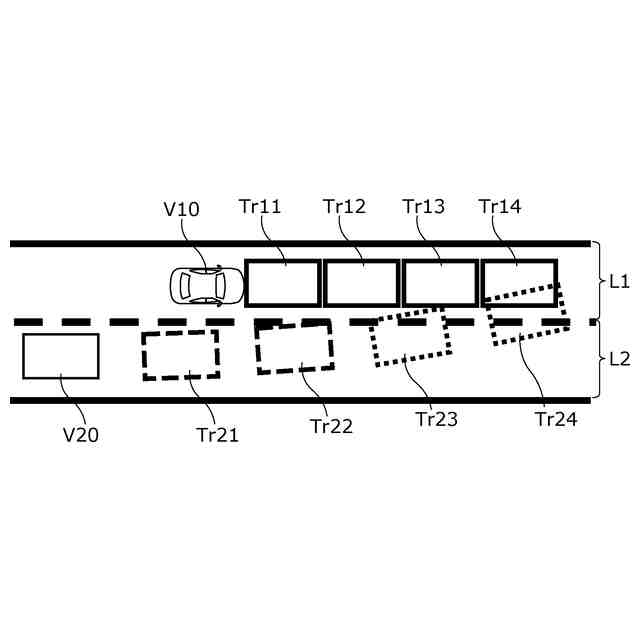
自車両の周辺で走行している他車両の挙動に応じた自車両の制御として、他車両との衝突回避制御がある。衝突回避制御の一例として、他車両が自車両を追い越して、自車両の前方において、自車両が走行している車線に移動する状況での制御例について説明する。この状況では、自車両の予測軌道と、他車両の予測軌道とを算出し、自車両と他車両との衝突が予測される場合に、自車両において衝突回避制御を行う。衝突回避制御によって、例えば、自車両を減速させながら、横方向において他車両から離れる向きに移動させる。これにより、自車両と他車両との衝突可能性を低減できる。
【0005】
しかしながら、このような衝突回避制御においては、例えば、他車両の挙動が不安定である場合、自車両において、必要以上に衝突回避制御を行い得る。また、衝突回避制御を行うことで、自車両が自車線からはみ出すなどの危険な状況が発生し得る。
【0006】
そこで、本発明は、かかる問題に鑑みてなされたものであって、車両の走行支援において、必要以上に衝突回避制御を行うことを抑制することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の一態様に係る走行支援方法は、自車両の走行を支援する走行支援方法であって、前記自車両が走行する車線の隣の車線を走行する後続の移動体が、前記自車両との衝突判定の対象となる判定対象移動体であるか否かを判定する移動体判定ステップと、前記移動体の予測軌道である移動体軌道を算出する移動体軌道算出ステップと、前記自車両の予測軌道である自車両軌道を算出する自車両軌道算出ステップと、前記自車両軌道と、前記判定対象移動体の前記移動体軌道とに基づいて前記衝突判定を行う衝突判定ステップとを含み、前記移動体判定ステップにおいて、前記自車両を基準とした方位角のうち、所定の方位角範囲内にある前記移動体のみを前記判定対象移動体と判定する。
【0008】
また、上記目的を達成するために、本発明の一態様に係るプログラムは、上記走行支援方法をコンピュータに実行させるためのプログラムである。
【0009】
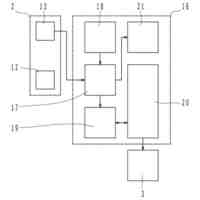
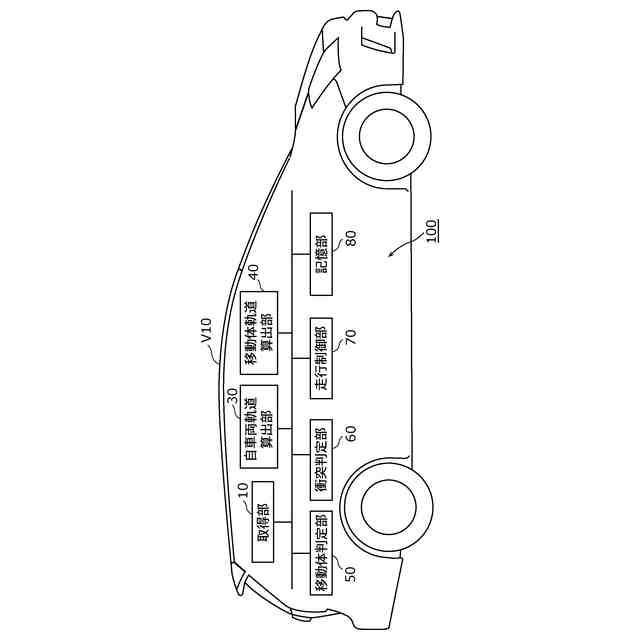
また、上記目的を達成するために、本発明の一態様に係る走行支援装置は、自車両の走行を支援する走行支援装置であって、前記自車両が走行する車線の隣の車線を走行する後続の移動体が、前記自車両との衝突判定の対象となる判定対象移動体であるか否かを判定する移動体判定部と、前記移動体の予測軌道である移動体軌道を算出する移動体軌道算出部と、前記自車両の予測軌道である自車両軌道を算出する自車両軌道算出部と、前記自車両軌道と、前記判定対象移動体の前記移動体軌道とに基づいて前記衝突判定を行う衝突判定部とを備え、前記移動体判定部は、前記自車両を基準とした方位角のうち、所定の方位角範囲内にある前記移動体のみを前記判定対象移動体と判定する。
【0010】
また、上記目的を達成するために、本発明の一態様に係る自律移動体は、上記走行支援装置と、前記自車両とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
防犯装置
26日前
個人
非常放送システム
2か月前
個人
飛行体衝突回避装置
3か月前
個人
バス送迎支援システム
2か月前
個人
降車漏れ通報システム
5日前
株式会社SUBARU
車両
3か月前
株式会社SUBARU
車両
3か月前
スズキ株式会社
運転支援装置
1か月前
スズキ株式会社
運転支援装置
1か月前
株式会社ユピテル
システム等
1か月前
スズキ株式会社
車線案内装置
1か月前
株式会社SUBARU
サーバ装置
3か月前
ホーチキ株式会社
煙感知器
6日前
ホーチキ株式会社
煙感知器
6日前
株式会社ミヤワキ
測定装置
16日前
能美防災株式会社
警報器
2か月前
能美防災株式会社
表示灯
2か月前
中国電力株式会社
安全管理システム
27日前
トヨタ自動車株式会社
遠隔操作装置
1か月前
株式会社アガタ
閉空間監視装置
2か月前
個人
配車システム
3か月前
ニッタン株式会社
情報発信装置
20日前
トヨタ自動車株式会社
制御装置
1か月前
オクト産業株式会社
自動車用安全装置
19日前
ニッタン株式会社
感度試験装置
2か月前
個人
配車システム
3か月前
株式会社京三製作所
車両検出装置
2か月前
株式会社デンソーウェーブ
監視システム
1か月前
トヨタ自動車株式会社
情報収集システム
2か月前
株式会社大林組
異常検知システム
3か月前
能美防災株式会社
火災感知器
1か月前
トヨタ自動車株式会社
映像処理方法
6日前
竹中エンジニアリング株式会社
緊急呼出システム
2か月前
井関農機株式会社
トラクタの制御システム
3か月前
トヨタ自動車株式会社
運転支援装置
2か月前
ホーチキ株式会社
防災盤の筐体構造
16日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ