TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024074317
公報種別
公開特許公報(A)
公開日
2024-05-31
出願番号
2022185376
出願日
2022-11-21
発明の名称
分離式ショックセンサ
出願人
株式会社ダイヘン
代理人
弁理士法人深見特許事務所
主分類
B25J
17/02 20060101AFI20240524BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームへの不要な外力を加えることなく、ロボットアームへの干渉負荷を軽減させることができるとともに、ショックセンサが動作した後の復帰作業時間を低減する。
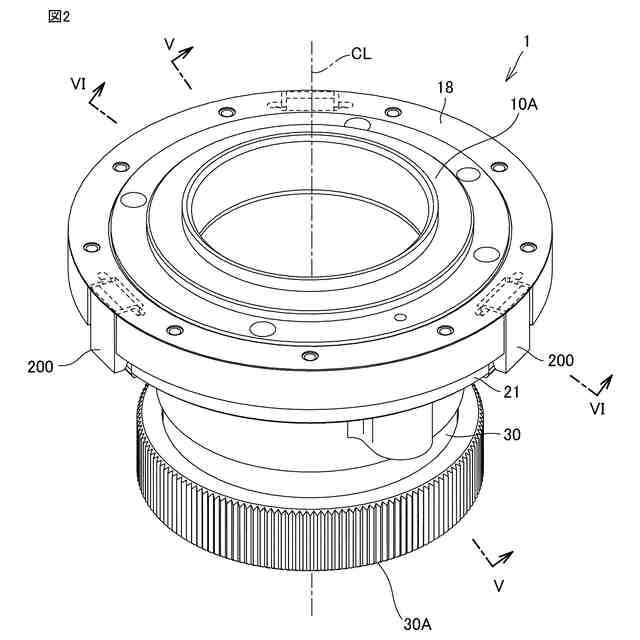
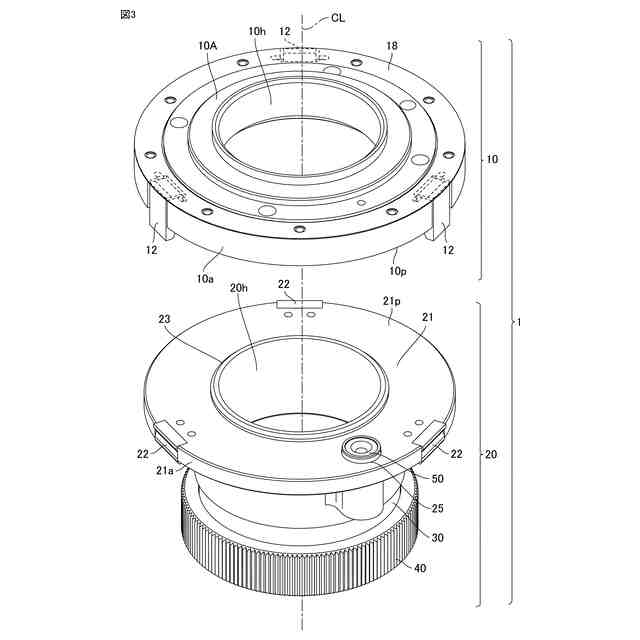
【解決手段】分離式ショックセンサであって、中心軸CLに対して環状に設けられ、取付面10Aを有し、中心軸CLを中心とする第1貫通孔10hを有する円盤状の環状アダプタ10と、環状アダプタ10と同軸に設けられ、環状アダプタ10に対して着脱可能に取り付けられ、中心軸CLを中心とする第2貫通孔20hを有する円筒状ハウジング20と、を備え、環状アダプタ10と円筒状ハウジング20との着脱を可能とするロック機構、環状アダプタと円筒状ハウジング20とを重ね合わせた際に、中心軸CLを中心とした相互の回転を禁止するための回転禁止機構、および、環状アダプタ10の中心と円筒状ハウジング20の中心とを一致させるための心出機構と有する。
【選択図】図3
特許請求の範囲
【請求項1】
ツールが装着される装着面と、ロボットアームに取り付けられる取付面とを備える分離式ショックセンサであって、
中心軸に対して環状に設けられ、前記取付面を有し、前記中心軸を中心とする第1貫通孔を有する円盤状の環状アダプタと、
前記環状アダプタと同軸に設けられ、前記環状アダプタに対して着脱可能に取り付けられ、前記中心軸を中心とする第2貫通孔を有する円筒状ハウジングと、
を備え、
前記円筒状ハウジングは、
前記環状アダプタが取付られる位置に、前記環状アダプタに対向するように、半径方向に張り出す環状フランジを有し、
前記環状アダプタの第1外周面と前記環状フランジの第2外周面との間には、前記環状アダプタと前記円筒状ハウジングとの着脱を可能とするロック機構が設けられ、
前記環状アダプタの前記環状フランジ側の第1当接面と、前記環状フランジの前記環状アダプタ側の第2当接面と、の間には、前記環状アダプタと前記円筒状ハウジングとを重ね合わせた際に、前記中心軸を中心とした相互の回転を禁止するための回転禁止機構が設けられ、
前記環状アダプタと前記環状フランジとの間には、前記環状アダプタと前記円筒状ハウジングとを重ね合わせた際に、前記環状アダプタの中心と前記円筒状ハウジングの中心とを一致させるための心出機構が設けられている、
分離式ショックセンサ。
続きを表示(約 940 文字)
【請求項2】
前記ロック機構は、
前記第1外周面または前記第2外周面の一方側に設けられる係合爪と、
前記第1外周面または前記第2外周面の他方側に設けられ、前記係合爪が係合する係合溝を有する係合溝部材と、を含み、
前記係合爪は、
前記環状アダプタと前記環状フランジとが突合わされた状態においては、前記係合爪の前記係合溝への係合状態が維持されるように、前記係合爪を前記係合溝側に押し付け、前記環状アダプタと前記環状フランジとの間に所定以上の外力が加わった場合には、前記係合爪の前記係合溝側への押し付けを解除する付勢機構を有する、
請求項1に記載の分離式ショックセンサ。
【請求項3】
前記回転禁止機構は、
前記第1当接面または前記第2当接面の一方側に設けられる、突起部材と、
前記第1当接面または前記第2当接面の他方側に設けられ、前記突起部材を受入れる受入凹部と、を含み、
前記突起部材は、
前記第1当接面と前記第2当接面とが離間した状態においては、前記突起部材が設けられた前記第1当接面または前記第2当接面から後退する位置に収容され、
前記第1当接面と前記第2当接面とを突合わされた状態においては、前記突起部材が突出し、前記突起部材が前記受入凹部に収容されることで、前記環状アダプタと前記円筒状ハウジングとを重ね合わせた際に、前記中心軸を中心とした相互の回転が禁止される、
請求項1に記載の分離式ショックセンサ。
【請求項4】
前記心出機構は、
前記第1当接面または前記第2当接面の一方側において、前記中心軸と同心に設けられる環状凸部と、
前記第1当接面または前記第2当接面の他方側において、前記中心軸と同心に設けられる環状凹部と、を含み、
前記第1当接面と前記第2当接面とが突合わされた状態においては、前記環状凸部が前記環状凹部に受入れられることにより、
前記環状アダプタと前記円筒状ハウジングとを重ね合わせた際に、前記環状アダプタの中心と前記環状フランジの中心とが一致する、
請求項1に記載の分離式ショックセンサ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、分離式ショックセンサに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
ロボットアームの先端に取り付けられるツールの取替えに用いられる分離式ショックセンサを開示した先行技術文献として、特開2009-248148号公報(特許文献1)が挙げられる。
【先行技術文献】
【特許文献】
【0003】
特開2009-248148号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
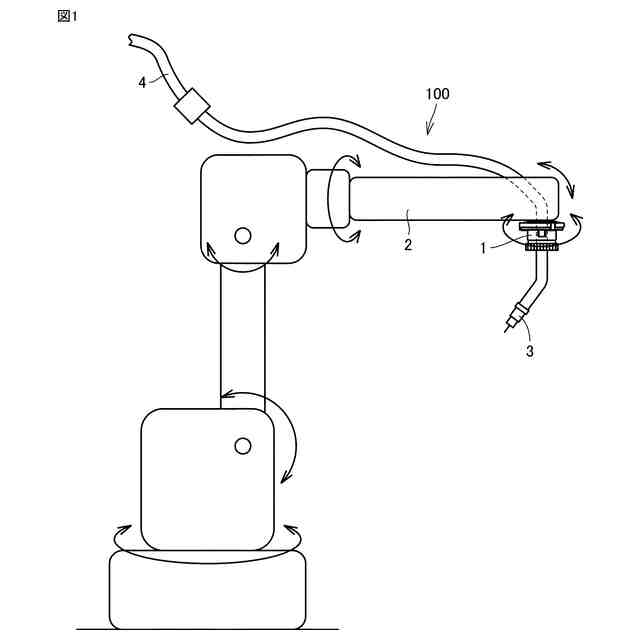
近年ロボットアームが高速で動作することから、ロボットアームの手首軸回転近くに分離式ショックセンサを設けることが望ましい。ロボットアームの動作中に、ツールに想定以上の外力が加わった場合には、ツールおよびロボットアームを保護する観点から、ツールおよびロボットアームに、不要な外力が加わらないようにするためのショックセンサを分離式ショックセンサに設ける必要もある。
【0005】
この発明は、上記の課題を解決するためになされたものであって、ロボットアームへの不要な外力が加わることを抑制して、ロボットアームへの干渉負荷を軽減させることができるとともに、ショックセンサが動作した後の復帰作業時間を低減することが可能な構成を備える、分離式ショックセンサを提供することを目的とする。
【課題を解決するための手段】
【0006】
[1]本開示の分離式ショックセンサにおいては、ツールが装着される装着面と、ロボットアームに取り付けられる取付面とを備える分離式ショックセンサであって、中心軸に対して環状に設けられ、上記取付面を有し、上記中心軸を中心とする第1貫通孔を有する円盤状の環状アダプタと、上記環状アダプタと同軸に設けられ、上記環状アダプタに対して着脱可能に取り付けられ、上記中心軸を中心とする第2貫通孔を有する円筒状ハウジングと、を備える。
【0007】
上記円筒状ハウジングは、上記環状アダプタが取付られる位置に、上記環状アダプタに対向するように、半径方向に張り出す環状フランジを有し、上記環状アダプタの第1外周面と上記環状フランジの第2外周面との間には、上記環状アダプタと上記円筒状ハウジングとの着脱を可能とするロック機構が設けられる。
【0008】
上記環状アダプタの上記環状フランジ側の第1当接面と、上記環状フランジの上記環状アダプタ側の第2当接面と、の間には、上記環状アダプタと上記円筒状ハウジングとを重ね合わせた際に、上記中心軸を中心とした相互の回転を禁止するための回転禁止機構が設けられ、上記環状アダプタと上記環状フランジとの間には、上記環状アダプタと上記円筒状ハウジングとを重ね合わせた際に、上記環状アダプタの中心と上記円筒状ハウジングの中心とを一致させるための心出機構が設けられている。
【0009】
[2]:[1]に記載の分離式ショックセンサにおいて、上記ロック機構は、上記第1外周面または上記第2外周面の一方側に設けられる係合爪と、上記第1外周面または上記第2外周面の他方側に設けられ、上記係合爪が係合する係合溝を有する係合溝部材と、を含み、上記係合爪は、上記環状アダプタと上記環状フランジとが突合わされた状態においては、上記係合爪の上記係合溝への係合状態が維持されるように、上記係合爪を上記係合溝側に押し付け、上記環状アダプタと上記環状フランジとの間に所定以上の外力が加わった場合には、上記係合爪の上記係合溝側への押し付けを解除する付勢機構を有する。
【0010】
[3]:[1]または[2]に記載の分離式ショックセンサにおいて、上記回転禁止機構は、上記第1当接面または上記第2当接面の一方側に設けられる、突起部材と、上記第1当接面または上記第2当接面の他方側に設けられ、上記突起部材を受入れる受入凹部と、を含み、上記突起部材は、上記第1当接面と上記第2当接面とが離間した状態においては、上記突起部材が設けられた上記第1当接面または上記第2当接面から後退する位置に収容され、上記第1当接面と上記第2当接面とを突合わされた状態においては、上記突起部材が突出し、上記突起部材が上記受入凹部に収容されることで、上記環状アダプタと上記円筒状ハウジングとを重ね合わせた際に、上記中心軸を中心とした相互の回転が禁止される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
株式会社フジキン
レンチ
8か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
UTM株式会社
搬送装置
7か月前
個人
ペットボトル用蓋開け具。
7か月前
株式会社ツノダ
挟持工具
3か月前
株式会社ツノダ
挟持工具
4か月前
株式会社右川ゴム製造所
把持装置
2か月前
川崎重工業株式会社
ハンド
4か月前
個人
ロボットシステム
6か月前
川崎重工業株式会社
罫書用治具
16日前
株式会社マキタ
動力工具
1か月前
株式会社不二越
ロボット
8か月前
学校法人立命館
ロボットハンド
3か月前
トヨタ自動車株式会社
関節機構
6か月前
トヨタ自動車株式会社
関節機構
6か月前
学校法人立命館
グリッパ
3か月前
株式会社不二越
ロボット
6か月前
株式会社ダイヘン
搬送装置
1か月前
個人
プーリーキー抜き治具
3か月前
トヨタ自動車株式会社
ハンド構造
6日前
個人
作業台
7か月前
株式会社ダイヘン
搬送装置
1か月前
オムロン株式会社
ロボットハンド
8か月前
株式会社不二越
予測システム
4か月前
国立大学法人山形大学
二重関節機構
1か月前
CKD株式会社
電動把持装置
1か月前
株式会社近藤製作所
ロータリージョイント
8か月前
川崎重工業株式会社
ロボット
8か月前
宮川工機株式会社
板状部品移動装置
1か月前
東京都公立大学法人
ロボットハンド
1か月前
工機ホールディングス株式会社
作業機
15日前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ