TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024072249
公報種別
公開特許公報(A)
公開日
2024-05-27
出願番号
2023145344
出願日
2023-09-07
発明の名称
電動車両のトラクションコントロール方法
出願人
光陽工業股分有限公司
代理人
弁理士法人山王坂特許事務所
主分類
B60L
15/20 20060101AFI20240520BHJP(車両一般)
要約
【課題】速やかに前輪と後輪との車輪速度差を小さくして、電動車両の横滑り関連事故を防止する。
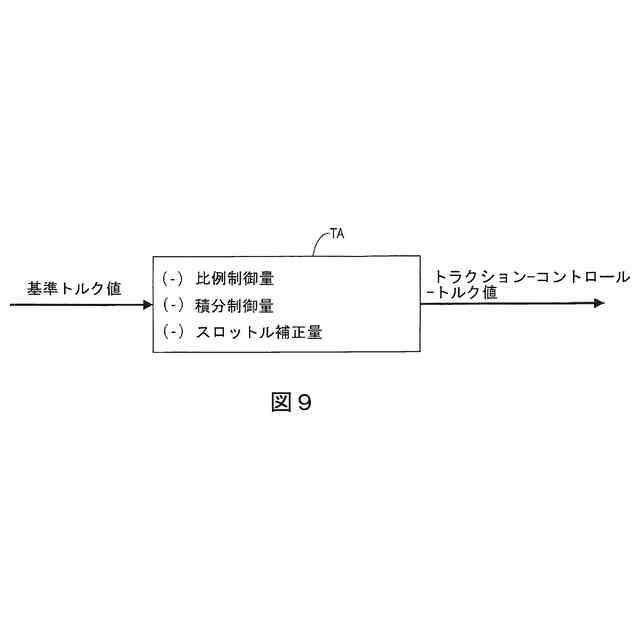
【解決手段】電動車両は前輪センサと、後輪センサと、スロットル位置センサと、制御ユニットとを含み、制御ユニットは、前輪センサと、後輪速度センサと、スロットル位置センサとに接続される。電動車両の前輪および後輪がスリップ値を生成すると、制御ユニットはスリップ値がスリップ上限閾値に達したかどうかを判定し、達した場合、制御ユニットはトラクションコントロール状態を実行し、現在のトルク値を基準トルク値とし、次いで、制御ユニット内蔵のトラクションコントロールアルゴリズムを通して、基準トルク値から比例制御量、積分制御量、およびスロットル補正量を減算して、指令トラクションコントロールトルク指令を生成し、トラクションコントロールトルク指令に従ってパワーモータを制御する。
【選択図】図5
特許請求の範囲
【請求項1】
制御ユニットによって実行される電動車両のトラクションコントロール方法であって、以下のステップを含むことを特徴とする電動車両のトラクションコントロール方法。
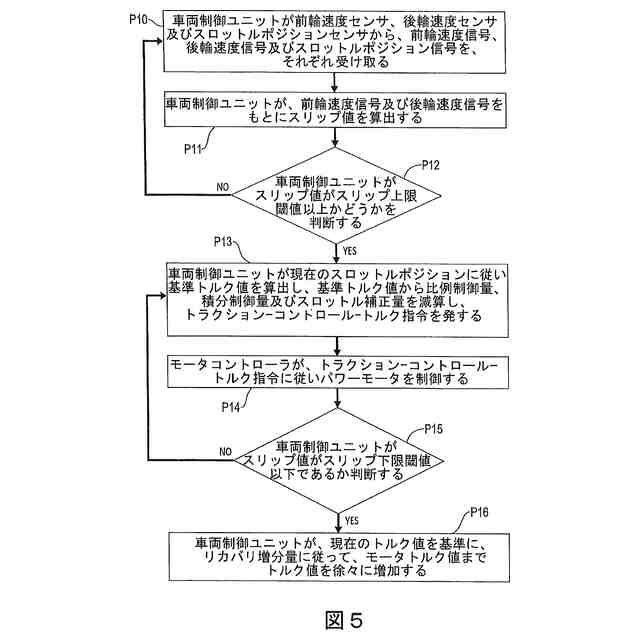
ステップ(a):前輪速度センサ、後輪速度センサ及びスロットル位置センサからそれぞれ前輪速度信号、後輪速度信号及びスロットルポジション信号を受信する、
ステップ(b):前輪速度信号及び後輪速度信号に基づいてスリップ値を算出する、
ステップ(c):スリップ値がスリップ上限閾値以上であるかどうかを判定する、
ステップ(d):スリップ値がスリップ上限閾値以上であるとき、現在のスロットルポジション信号に従って基準トルク値を計算し、その後、基準トルク値から比例制御量および積分制御量を減算し、トラクションコントロールトルク指令を生成する、及び、
ステップ(e):トラクションコントロールトルク指令に従ってパワーモータを制御する。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の電動車両のトラクションコントロール方法において、
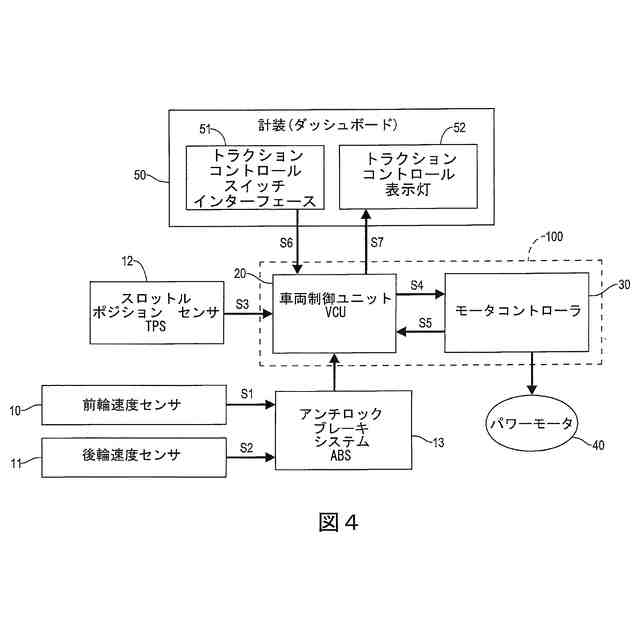
前記制御ユニットは、車両制御ユニットとモータコントローラとを備え、
前記ステップ(d)において、前記車両制御ユニットは、前記スリップ値が前記スリップ上限閾値以上であると判定した場合、前記車両制御ユニットは前記現在のスロットルポジション信号に応じて前記基準トルク値を算出し、前記基準トルク値から前記比例制御量と前記積分制御量とを減算して前記モータコントローラに前記トラクションコントロールトルク指令を出力し、前記モータコントローラが、前記ステップ(e)を実行することを特徴とする電動車両のトラクションコントロール方法。
【請求項3】
請求項1に記載の電動車両のトラクションコントロール方法であって、
前記制御ユニットは、車両制御ユニットとモータコントローラとが一体化された単一のコントローラであることを特徴とする電動車両のトラクションコントロール方法。
【請求項4】
請求項1に記載の電動車両のトラクションコントロール方法であって、
前記基準トルク値から、さらに、スロットル補正量を減算し、前記トラクションコントロールトルク指令を生成することを特徴とする電動車両のトラクションコントロール方法。
【請求項5】
請求項4に記載の電動車両のトラクションコントロール方法であって、
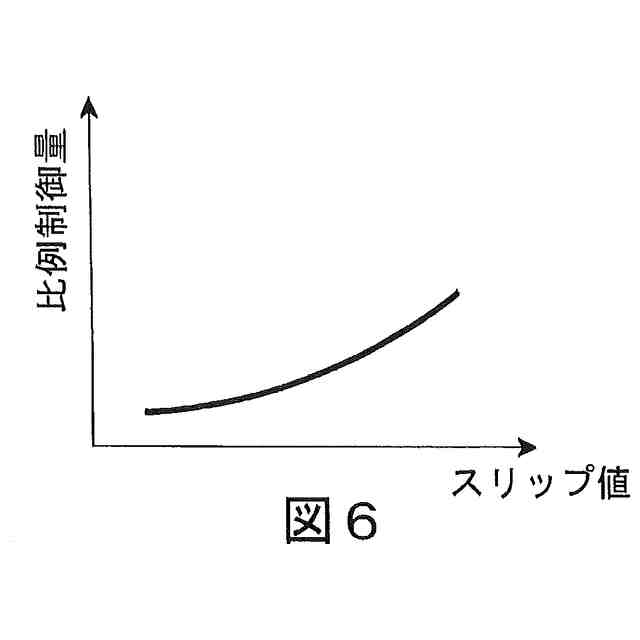
前記スリップ値が大きいほど、前記比例制御量が大きく、
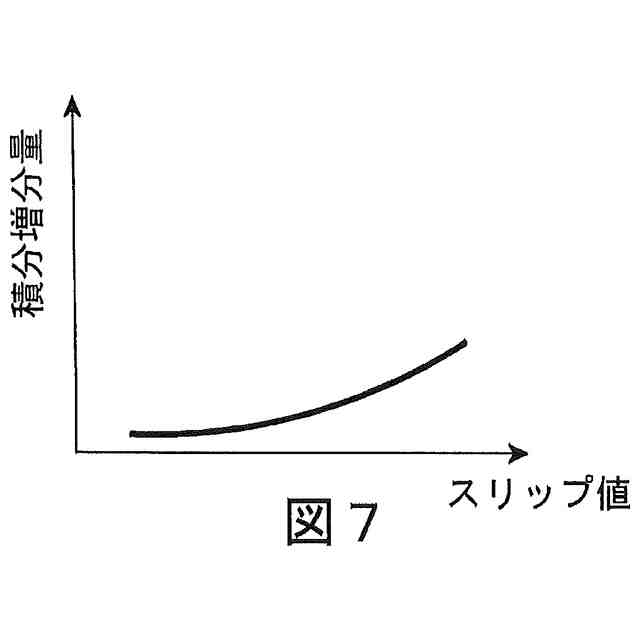
前記積分制御量は積分増分量の積算であって、前記スリップ値が大きいほど、前記積分増分量が大きく、
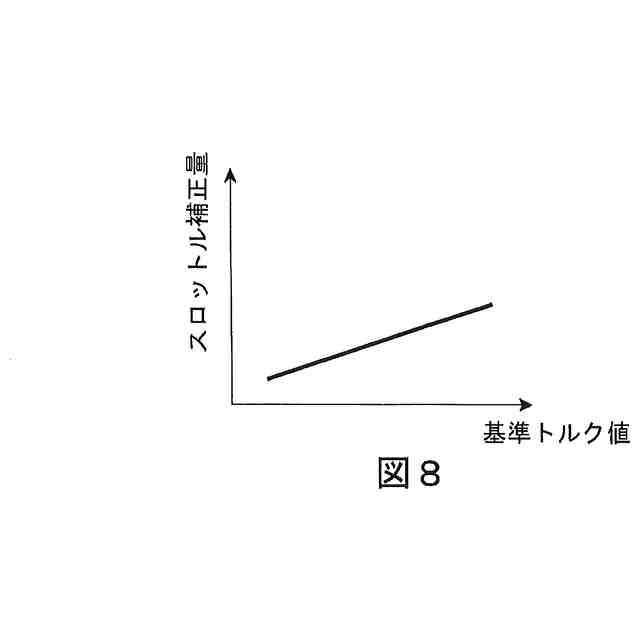
前記基準トルク値が大きいほど、前記スロットル補正量が大きいことを特徴とする電動車両のトラクションコントロール方法。
【請求項6】
請求項1に記載の電動車両のトラクションコントロール方法であって、
前記電動車両は、前記前輪速度信号及び前記後輪速度信号を受信し、通信インターフェースを介して前記制御ユニットに前輪速度及び後輪速度を送信するアンチロックブレーキシステムをさらに含むことを特徴とする電動車両のトラクションコントロール方法。
【請求項7】
請求項1に記載の電動車両のトラクションコントロール方法であって、
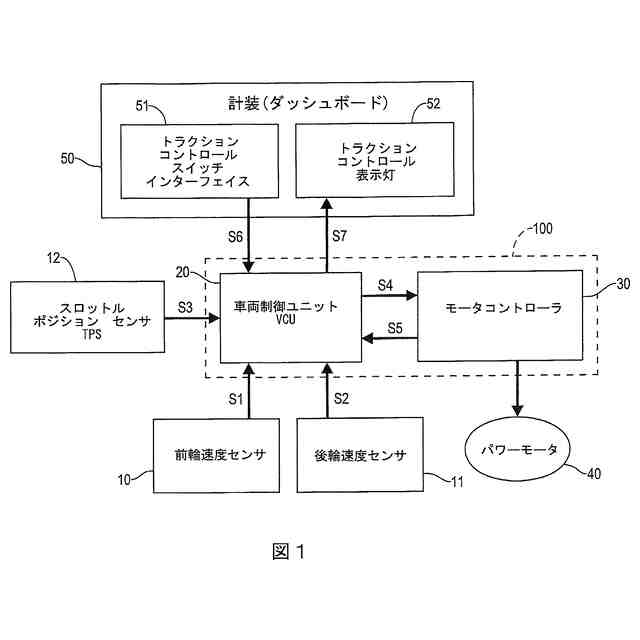
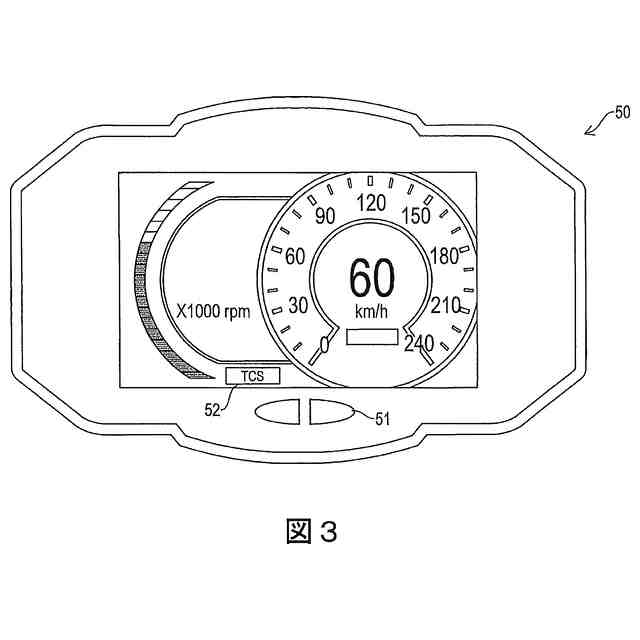
前記電動車両は、ダッシュボードをさらに備え、前記ダッシュボードはトラクションコントロールスイッチインターフェースおよびトラクションコントロール表示灯を備え、
前記トラクションコントロールスイッチインターフェースはユーザの操作に応じて前記制御ユニットにスイッチ指令を出力し、
前記制御ユニットは前記スイッチ命令に応じて、前記トラクションコントロール表示灯にインジケータランプ信号を出力し、前記トラクションコントロール表示灯の状態を制御することを特徴とする電動車両のトラクションコントロール方法。
【請求項8】
請求項7に記載の電動車両のトラクションコントロール方法であって、
前記制御ユニットは車両制御ユニットを備え、
前記トラクションコントロールスイッチインターフェースは、ユーザの操作に応じて前記車両制御ユニットに前記スイッチ指令を出力し、
前記車両制御ユニットは前記スイッチ指令に応じて前記トラクションコントロール表示灯の状態を制御することを特徴とする電動車両のトラクションコントロール方法。
【請求項9】
請求項7に記載の電動車両のトラクションコントロール方法であって、
前記制御ユニットは、前記スリップ値が前記スリップ上限閾値以上である場合、前記トラクションコントロール表示灯を点滅させることを特徴とする電動車両のトラクションコントロール方法。
【請求項10】
請求項1に記載の電動車両のトラクションコントロール方法であって、
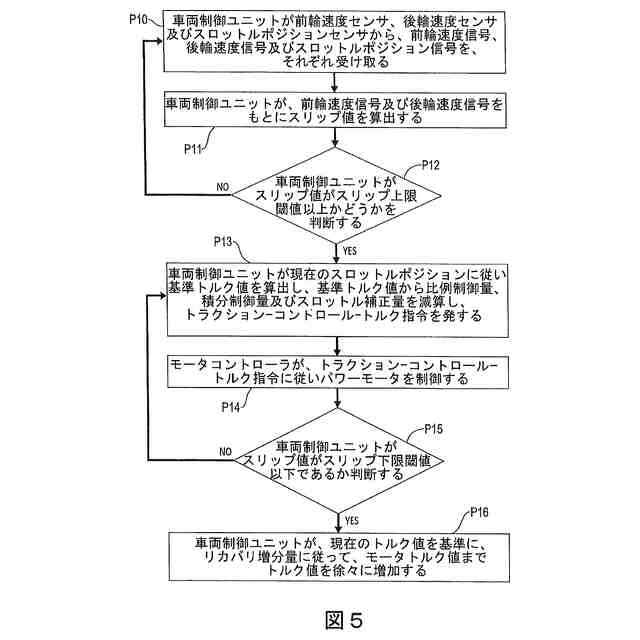
ステップ(f):前記スリップ値がスリップ下限閾値以下である場合に、前記スリップ値がスリップ下限閾値以下であるか否かを判定し、前記トラクションコントロールトルク指令の発生を停止し、前記トラクションコントロールトルク指令に従って前記パワーモータを停止するステップ、をさらに含むことを特徴とする電動車両のトラクションコントロール方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動車両(EV)の制御方法に関し、特に、電動車両のトラクションコントロール方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
現在、電動二輪車の動力源は主に、電動モータに必要な駆動力を供給するためのバッテリパックであり、電動モータの速度を変化させるように電動モータに印加される駆動力を調整するために、車両制御ユニット(VCU)を利用することができ、それによって、電動二輪車の速度を変化させることができる。
【0003】
電動二輪車が滑りやすい道路を走行しているとき、またはカーブを出入りするとき、前輪速度と後輪速度との車輪速度差(すなわち、スリップ)が生じる。車輪速差が大きすぎると、電動二輪車が横滑り(スキッド)することがあり、その結果、事故が発生することがある。そこで、電動二輪車の車両制御ユニットは、通常、フィードバック制御方法によって電動モータのトルクを低減し、車輪速度差の連続的な増加によって生じる横滑りを回避する。このフィードバック制御方法の基本原理では、車両制御ユニットは、車輪速度差が大きくなるほど、電動モータのトルクが小さくなるように制御する。一般的に、フィードバック制御方法は、積分制御方法または比例積分制御方法とすることができる。
【0004】
しかしながら、ある種の(高駆動力出力型等のような)電動二輪車では滑走時の駆動力を抑制する手段として前述のフィードバック制御方法を利用すると、このフィードバック制御方法では電動モータのトルクを低減するために積分制御方式又は比例積分制御方式のみを用いているため、電動二輪車を減速させる過程が比較的遅くなる。ユーザが電動二輪車を急激に加速すると、このフィードバック制御方法では電動モータトルクを抑制するには遅すぎて、電動二輪車に上述のような横滑りをもたらし、ユーザの運転安全性に影響を及ぼす可能性がある。
【0005】
特許文献1には、「電動車両のトラッキング・アンチスキッド制御システムとその制御方法」が開示され、「まず、正常力推定装置と駆動力推定装置を用いて路面摩擦係数を推定し、次に、路面状態推定装置を用いて、路面摩擦係数とタイヤスリップに従って摩擦曲線の傾きを求め、これを目的とするスリップに対する計算ルールの設計に用いる。最後に、アダプティブなファジィ滑り制御(スライディングコントロール)を用いて、スリップ制御を行う。」と記載されているが、特許文献1では前輪速度と後輪速度との車輪速度の差(即ち、スリップ)を補正する技術的手段は開示されていない。
【先行技術文献】
【特許文献】
【0006】
台湾特許出願公開第201134706号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
既存の電動二輪車の前輪速度と後輪速度との車輪速度差がある場合、車輪速度差が連続的に増加するのを抑制するために、積分制御方式または比例積分制御方式のみを用いると、比較的遅い処理となる。したがって、電動二輪車モデルの種類によっては駆動力の抑制が間に合わず、その結果、依然として横滑りを起こし、ユーザの運転安全に影響を及ぼす可能性がある。
【課題を解決するための手段】
【0008】
本発明は、電動車両のためのトラクションコントロール方法を開示するものであり、この方法は、制御ユニットにより実行され、以下のステップを含む。
ステップ(a):前輪速度センサ、後輪速度センサ及びスロットルポジションセンサからそれぞれ前輪速度信号、後輪速度信号及びスロットルポジション信号を受信する、
ステップ(b):前輪速度信号及び後輪速度信号に基づいてスリップ値を算出する、
ステップ(c):スリップ値がスリップ上限閾値以上であるかどうかを判定する、
ステップ(d):スリップ値がスリップ上限閾値以上であるとき、現在のスロットルポジション信号に従って基準トルク値を計算し、次いで、比例制御量および積分制御量を基準トルク値から減算して、トラクションコントロールトルク指令を発生する、
ステップ(e):トラクションコントロールトルク指令に従ってパワーモータを制御する。
【発明の効果】
【0009】
本発明の電動車両のトラクションコントロール方法は、電動車両の制御ユニットにより実行される。制御ユニットは、電動二輪車の前輪と後輪とがスリップ値を生じたときに、スリップ値がスリップ上限閾値に達したか否かを判定する。スリップ値がスリップ上限閾値に達したならば、それは、前輪と後輪との車輪速差が大きくなり、スリップの危険性が大きくなることを意味する。このとき、制御ユニットは現在のスロットルポジション信号に応じて基準トルク値を算出し、その基準トルク値から比例制御量と積分制御量とを減算してトラクションコントロールトルク指令を生成し、このトラクションコントロールトルク指令に応じてパワーモータを制御し、動力モータの駆動力を速やかに抑制し、パワーモータの速度を適切に減速させる。これにより、前輪と後輪との車輪速度差を小さくして、電動車両の横滑り関連事故を防止することができる。
【図面の簡単な説明】
【0010】
本発明の第1の実施形態の電動車両の回路ブロック図
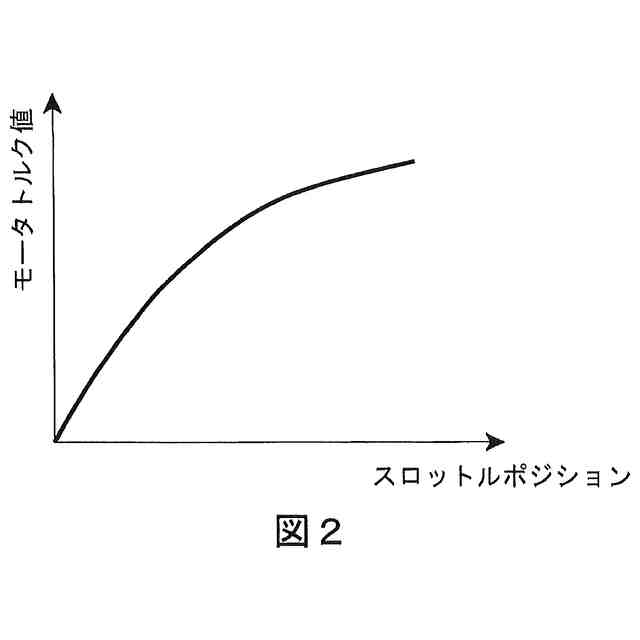
モータトルク値とスロットル位置の相対関係のグラフ
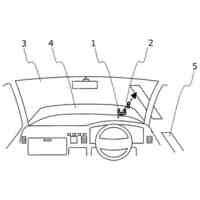
本発明の第1の実施形態の電動車両ダッシュボードの概略図
アンチロックブレーキシステムを含む、本発明の第1の実施形態のための電動車両の回路ブロック図
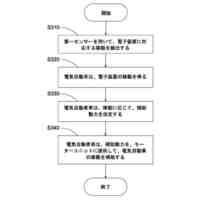
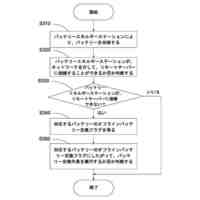
本発明の第1の実施形態の電動車両のトラクションコントロールシステムのフローチャート
比例制御量とスリップ値との相対関係のグラフ
積分増分量とスリップ値の相対関係のグラフ
スロットル補正量と基準トルク値との相対関係のグラフ
電動車両の車両制御ユニットのトラクションコントロールアルゴリズムの概略図
スリップ値、比例制御量、積分制御量、およびスロットル補正量の時間に対するグラフ
リカバリ増分量とスリップ値の相対関係のグラフ
スリップ値、トラクションコントロール状態、トルク値の時間に対するグラフ
本発明の第2の実施の形態の電動車両の回路ブロック図
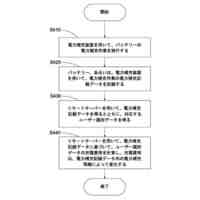
本発明の第2の実施の形態の電動車両のトラクションコントロールシステムのフローチャート
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
光陽工業股分有限公司
車両用クランクケース装置
3か月前
光陽工業股分有限公司
車両用無段変速トランスミッション装置
1か月前
光陽工業股分有限公司
車両移動支援方法、および、その電気自動車
13日前
光陽工業股分有限公司
車両乗車制御方法、および、その電気自動車
18日前
光陽工業股分有限公司
電気自動車の充電費用管理方法、および、システム
1か月前
光陽工業股分有限公司
電気自動車のバッテリー充電データ管理方法、および、システム
18日前
光陽工業股分有限公司
バッテリー交換管理方法、および、そのバッテリーエネルギーステーション
6日前
光陽工業股分有限公司
電気車両のバッテリ電力補充管理方法、システム、及びコンピュータープログラム
2か月前
個人
車両
2か月前
個人
眼科手術車
1か月前
個人
授乳用車両
25日前
個人
自動車運転補助装置
2か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
11日前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
25日前
個人
台車用車輪止め具
1か月前
個人
空気圧調節式ホイール。
4か月前
個人
キャンピングトレーラー
1か月前
個人
謝意シグナル装着車
1か月前
個人
自動車外部装着用しめ飾り
2か月前
日本精機株式会社
車載表示装置
2か月前
エムケー精工株式会社
洗車装置
3か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車外表示装置
4か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
25日前
日本精機株式会社
車両用表示装置
3か月前
トヨタ自動車株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
3か月前
株式会社SUBARU
車両
4か月前
日本精機株式会社
車両用表示装置
3か月前
株式会社青木製作所
タンクローリ
1か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ